
技术摘要:
本发明公开了工程机器人,包括壳体,所述壳体上方设置有摄像采集设备和行进监控设备,所述壳体下方安装有驱动装置,所述壳体内部安装有电源、数据通讯器和定位模块,所述摄像采集设备包括安装支架,所述安装支架上朝四个互相垂直的方向安装有高清摄像头,所述安装杆支 全部
背景技术:
工程机器人在施工现场得到了广泛的使用,其能够通过模拟施工动作,代替人工 完成智能化作业,节省劳动强度,且效率高,精度高,常用的包括运输机器人、上下料机器人 等。 在建筑行业中,工期进度的监管是一直以来难以实现良好解决的难题,建筑工程 在动工前,都会制定工期,施工时有专门负责监察的人员进行巡视,但是也是在预计工期临 近时,进行,且其中存在认为可控因素较大,不利于保障工程的质量,现阶段也研发了在线 监工的设备,能够及时将现场图像传递至相关人员手中,便于随时随地进行监工,但是这种 设备除了固定安装在现场的监控设备外,还有搭载在工程机器人上的摄像采集设备,但是, 由于施工现场环境复杂,路况崎岖,且存在爬坡爬梯坎的情况,工程机器人在攀爬过程中出 现跌落的情况,既有可能损坏机器人自身,还会损坏摄像采集设备,成本较高,使用风险大。
技术实现要素:
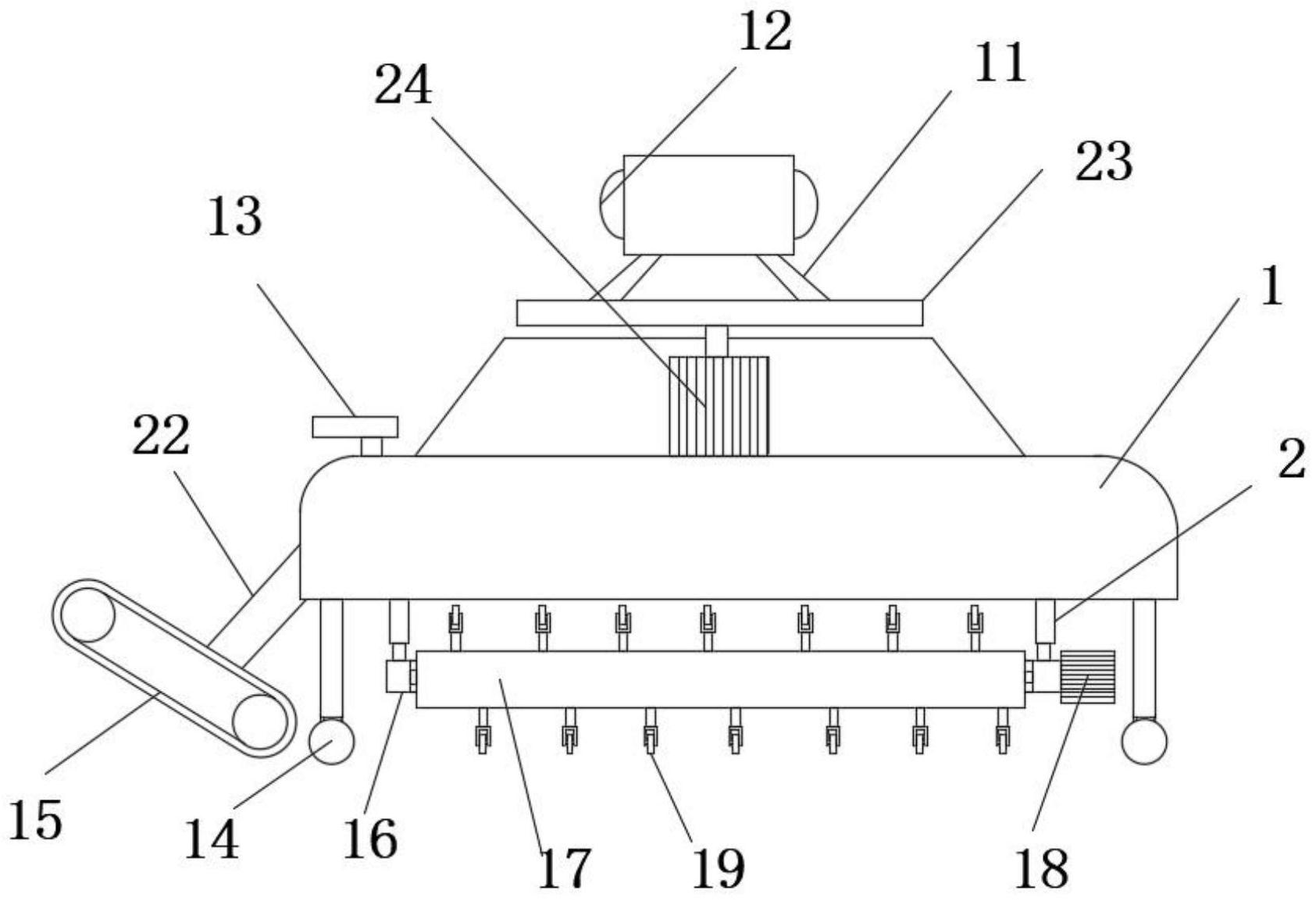
针对上述现有技术的不足,本专利申请所要解决的技术问题是:如何提供一种自 动化程度高、行动灵活、攀爬功能强的工程机器人。 为了实现上述目的,本发明采用了如下技术方案: 一种工程机器人,包,包括壳体,所述壳体上方设置有摄像采集设备和行进监控设 备,所述壳体下方安装有驱动装置,所述壳体内部安装有电源、数据通讯器和定位模块,所 述摄像采集设备包括安装支架,所述安装支架上朝四个互相垂直的方向安装有高清摄像 头,所述安装杆支架与所述壳体之间设置有旋转机构,所述行进监控设备包括设置在所述 壳体四周的监控摄像头,所述驱动装置包括安装在所述壳体下方的驱动轮、螺旋爬升装置 以及设置在所述壳体前方的攀爬履带,所述攀爬履带倾斜设置,所述螺旋爬升装置与所述 壳体之间通过升降机构连接。 在使用时,工程机器人在驱动装置的带动下能够到达施工现场,对施工现场的场 景经过摄像采集设备进行拍摄,并通过数据通讯器上传至远端负责人手中,对现场情况进 行实时监控,行进监控设备能够将工程机器人的行进路线进行实时采集,传输至操控员手 中,便于操控,同时可将采集路线图像进行存储,便于回溯,在进行移动的过程中,驱动轮可 以实现移动,在平面上进行自由移动,不同驱动轮的转速不同,完成转向以及旋转,当遇到 坡面时,攀爬履带起到平面到坡面间的转化,放置壳体受到较大的冲击,同时,攀爬履带能 够提供攀爬动力,放置驱动轮打滑,升降机构将螺旋爬升装置下放,使其能够与驱动轮的底 面一致,在坡面时,螺旋爬升装置提供一个螺旋向上的力,且力的方向与坡面平行,达到一 个支撑作用,防止下滑,在爬楼梯时,驱动轮与楼梯之间的震动容易导致整体翻覆,螺旋爬 升装置,可以在楼梯至今进行螺旋接触,形成了模拟涡轮蜗杆动作的咬合,即提供了升力, 3 CN 111546357 A 说 明 书 2/4 页 有防止过度跳动和滑动,保障了攀爬的效果,保护了整体的质量安全。 作为优化,所述螺旋爬升装置包括中空设置的框架,所述框架内平行设置有至少 一组转轴,每组转轴包括两根且互相平行设置,所述转轴与设置在所述框架外侧的第一驱 动电机传动连接,所述转轴周向设置有滚轮,所述滚轮呈螺旋状依次排列在所述转轴外侧, 每组转轴的螺旋方向相反,旋向相对设置。 这样,第一驱动电机带动转轴实现旋转,带动滚轮实现螺旋动作,螺旋动作时,滚 轮依次坡面或提坎进行接触,推动整体实现前进,相反的旋向能够起到稳定作用,避免出现 壳体倾斜的效果。 作为优化,所述升降机构包括设置在所述壳体下方的气缸,所述气缸的固定端与 所述壳体下表面固定连接,所述气缸的自由端与所述框架固定连接。 这样,能够在爬坡爬坎时完成将螺旋爬升装置的下放,平面行动时将其收起,避免 影响驱动轮的行进效率。 作为优化,所述驱动轮通过驱动支架与所述壳体连接,所述驱动支架上安装有第 二驱动电机,所述第二驱动电机与所述驱动轮传动连接。 这样,第二驱动电机能够起到驱动的作用,且可以通过调节各部分之间的转速,完 成专转向,便于操控,灵活度高。 作为优化,所述攀爬履带通过履带支架与所述壳体连接,所述攀爬履带设置在所 述壳体前进方向的前端,所述攀爬履带通过设置在所述攀爬支架上的第三驱动电机传动连 接。 这样,攀爬履带能够起到缓冲和过度作用,攀爬支架保障了连接稳定性以及缓冲 击,第三驱动电机将动力对其进行输入,保障攀爬履带能够提供较大的动力,辅助爬升。 作为优化,所述旋转机构包括设置在所述设置在所述壳体上端的转盘,所述安装 支架与所述转盘固定连接,所述壳体内设置有第四驱动电机,所述第四驱动电机的输出轴 与所述转盘同轴固定连接。 这样,可以实现高清摄像头进行旋转,方便多视角拍摄,避免各个高清摄像头之间 产生采集盲区。 作为优化,所述转轴的横截面为正多边形,所述滚轮通过滚轮架设置在所述转轴 的侧壁上。 这样,便于安装,相较于光滑的轴,正多边形能够提供一个安装基础,保障各个滚 轮之间的角度一致与安装稳定。 附图说明: 图1为本发明公开的工程机器人的结构示意图。 图2为图1中驱动装置的侧视图。 图3为螺旋爬升装置的结构示意图。 图4为图3中转轴与滚轮的配合示意图。











