
技术摘要:
本发明公开了一种工件缺陷定位方法,实现工件缺陷定位方法的检测系统至少包括图像采集器,位置传感器、FPGA、与FPGA通信的处理器,工件缺陷定位方法包括:FPGA控制图像采集器采集工件图像数据,并发送工件图像数据至处理器;处理器根据工件图像数据检出缺陷并确定目标 全部
背景技术:
缺陷检测方式在检测得到缺陷后,应对含有缺陷的工件进行修补或直接移除缺陷 工件。当缺陷件出现频率不高时,如果用人工监管的方式监督是否检出缺陷将会耗费大量 的人力。在不同的应用场景中,操作员需要对工件进行不同的操作,为提高工作效率及自动 化程度,缺陷检测系统需要有将有缺陷的工件定位在某一指定区域中方便操作者进行观察 或者处理的能力。 公开号为CN1828284A的发明专利申请公开了一种管道检测缺陷定位系统,该检测 系统并没有基于机器视觉进行检测,且缺陷定位系统涉及部件多,成本高。公开号为 CN105466959A的发明专利申请公开了一种大型检件无损检测中缺陷的定位方法,该定位方 法采用机器视觉进行检测,仅能检测到缺陷位置,但是并不能实时定位到实体缺陷位置。
技术实现要素:
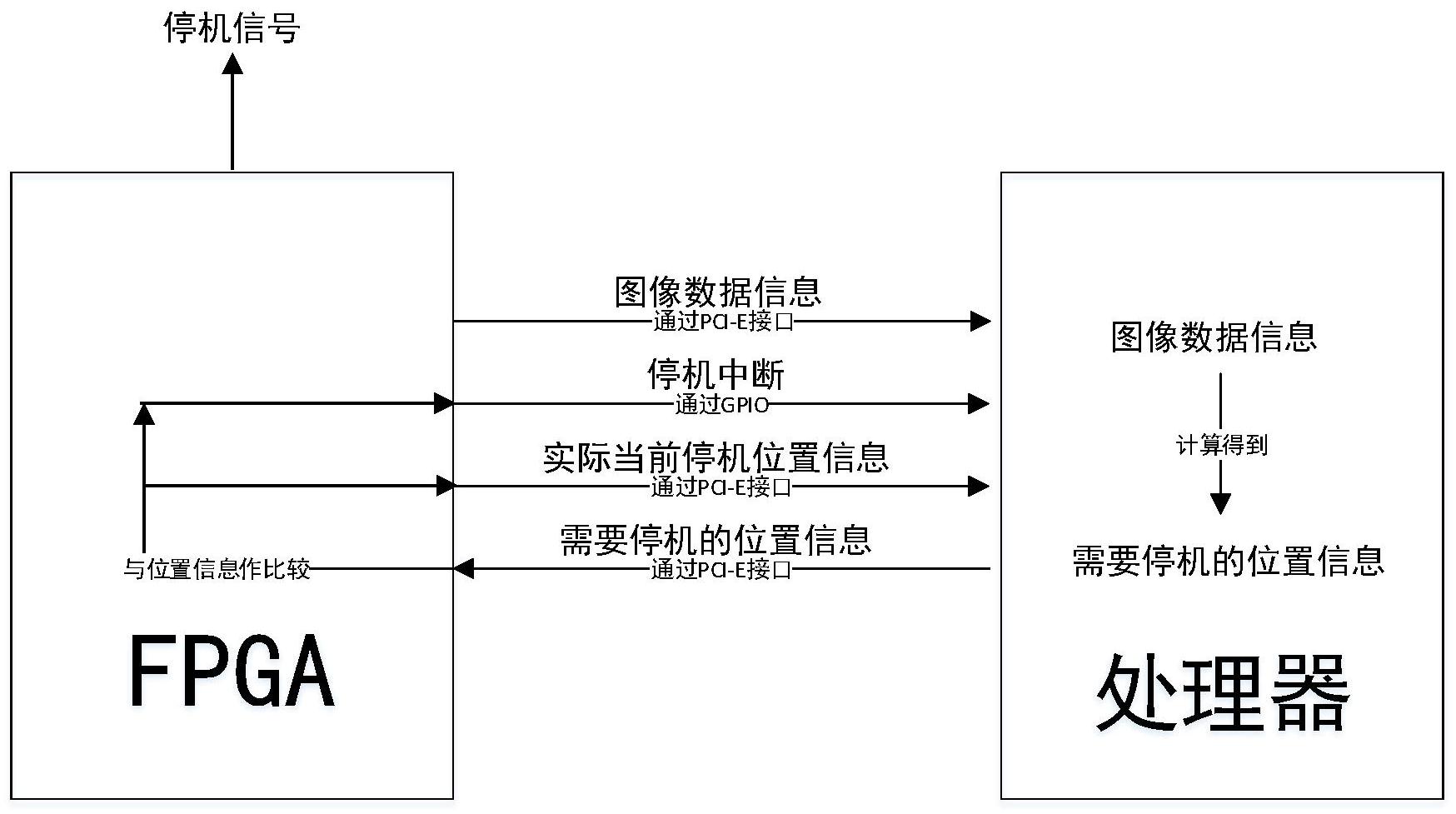
本发明的目的是提供一种工件缺陷定位方法,该工件缺陷定位方法能够基于机器 视觉确定缺陷位置,并能够根据缺陷位置在实体工件缺陷位置进行准确定位。 本发明的技术方案为: 一种工件缺陷定位方法,实现所述工件缺陷定位方法的检测系统至少包括图像采 集器,位置传感器、FPGA、与所述FPGA通信的处理器,所述工件缺陷定位方法包括: 所述FPGA控制所述图像采集器采集工件图像数据,并发送所述工件图像数据至所 述处理器; 所述处理器根据工件图像数据检出缺陷并确定目标缺陷位置信息后,发送所述目 标缺陷位置信息至所述FPGA; 所述FPGA根据所述位置传感器实时采集数据确定当前实际位置信息和工件运转 速度信息,并根据工件运转速度信息和停机信号响应时间确定延迟距离,根据所述延迟距 离在与所述目标缺陷位置距离所述延迟距离处的当前实际位置信息给出停机信号,以使工 件刚好停留在目标缺陷位置。 优选地,所述FPGA以所述位置传感器采集信号为基础触发所述图像采集器进行工 件图像采集。也就是FPGA在获得位置传感器采集信号的基础上向图像采集器发出触发信 号,以使图像采集器进行工件图像采集。 优选地,所述处理器根据工件图像检出缺陷并确定目标缺陷位置信息包括: 处理器将通过分水岭算法从分割工件图像中分割出工件区域,逐像素点建立所述 工件区域对应的灰度高斯模型并计算像素点灰度均值及方差,根据像素点的均值和方差对 工件区域的像素点进行判断,根据判断结果构建工件目标缺陷区域以取得目标缺陷的图像 3 CN 111583084 A 说 明 书 2/4 页 坐标信息,然后并通过比例尺转换为物理坐标获得目标缺陷位置信息。 优选地,所述位置传感器实时采集数据确定当前实际位置信息和工件运转速度信 息包括: 所述位置传感器每经过固定距离会产生一个上升沿信号,所述FPGA对所述位置传 感器的信号上升沿进行计数,通过计数值确定工件运行经过的总长度,从而实时监测工件 的当前实际位置信息; 所述FPGA通过统计单位时间内信号上升沿个数,可以获得工件运转速度信息。 优选地,所述根据工件运转速度信息和停机信号响应时间确定延迟距离包括: 工件运转速度与停机信号响应时间的乘积为延迟距离。 在确定延迟距离时,还考虑电机停止所需时间,因此,所述停机信号响应时间包括 所述FPGA给出停机信号后系统响应时间和电机停止所需时间。 所述工件缺陷定位方法还包括: 所述FPGA在给出停机信号的同时向所述处理器给出中断信号,通知所述处理器已 给出停机信号并上传当前停机位置信息; 所述处理器在接收到中断信号后,根据当前停机位置显示对应有缺陷工件的采集 图像。 优选地,所述FPGA与所述处理器通过PCI-E接口协议进行工件图像数据和目标缺 陷位置信息。 与现有技术相比,本发明具有的有益效果为: 本发明提供的工件缺陷定位方法从减少人力消耗的角度出发,FPGA通过位置传感 器获取的当前缺陷位置和处理器获得的目标缺陷位置的比较和控制即使输出停机信号给 工件,以使工件刚好停留在目标缺陷位置。这样可以免去人工定位缺陷工件的人力消耗,提 高系统自动化程度,同时也能够保证有缺陷工件被检出后得到及时处理。在机器视觉缺陷 检测系统中具有广阔的应用前景。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图做简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动前提下,还可以根 据这些附图获得其他附图。 图1为实施例提供的工件缺陷定位方法中FPGA与处理器的信息交互示意图; 图2为实施例提供的工件缺陷定位方法中FPGA与处理器的功能实现流程示意图。











