
技术摘要:
本发明公开了一种骨水泥电动推进枪,包括注射器、注射器固定套、注射器推杆、电驱直线运动机构、电池、扳机、第一传感器以及控制器。注射器固定套用于固定注射器的针筒,注射器推杆用于连接注射器的活塞,电驱直线运动机构用于驱动注射器推杆沿直线运动。第一传感器用 全部
背景技术:
生物活性陶瓷作为骨填充、修复材料已经在临床上大量应用,但由于这些材料都 是高温烧结后的块状或颗粒状,不具有可塑性。医生在手术过程中无法按照病人骨缺损部 位任意塑型,而且不能完全充填异形骨空穴。另一方面,人工关节的固定、不稳定性骨折的 内固定等同样也需要一种新的生物医用材料。因此,一种新型的生物材料——骨水泥成为 了人们关注的热点。骨水泥的其主要成分是聚甲基丙烯酸甲酯(polymethylmethacrylic, PMMA),主要用于人工关节置换手术、骨成形术(如椎体成形术等)。 目前,骨水泥临床使用大多采用的还是注射器搭配超长注射管路,以人工控制的 方式进行注射。由于注射管路长、注射压力大且骨水泥具有低流动性的特点,人工注射时注 射器以及管路中的骨水泥往往容易固化,需要在有限的时间里完成注射操作,增加了医务 人员的注射难度。并且,当注射器以及管路的骨水泥固化到一定程度时就必须进行注射器、 注射管路以及骨水泥的更换,给患者增加费用负担。同时传统手动推注的骨水泥装置在推 注过程中会存在明显的晃动现象,影响手术安全。
技术实现要素:
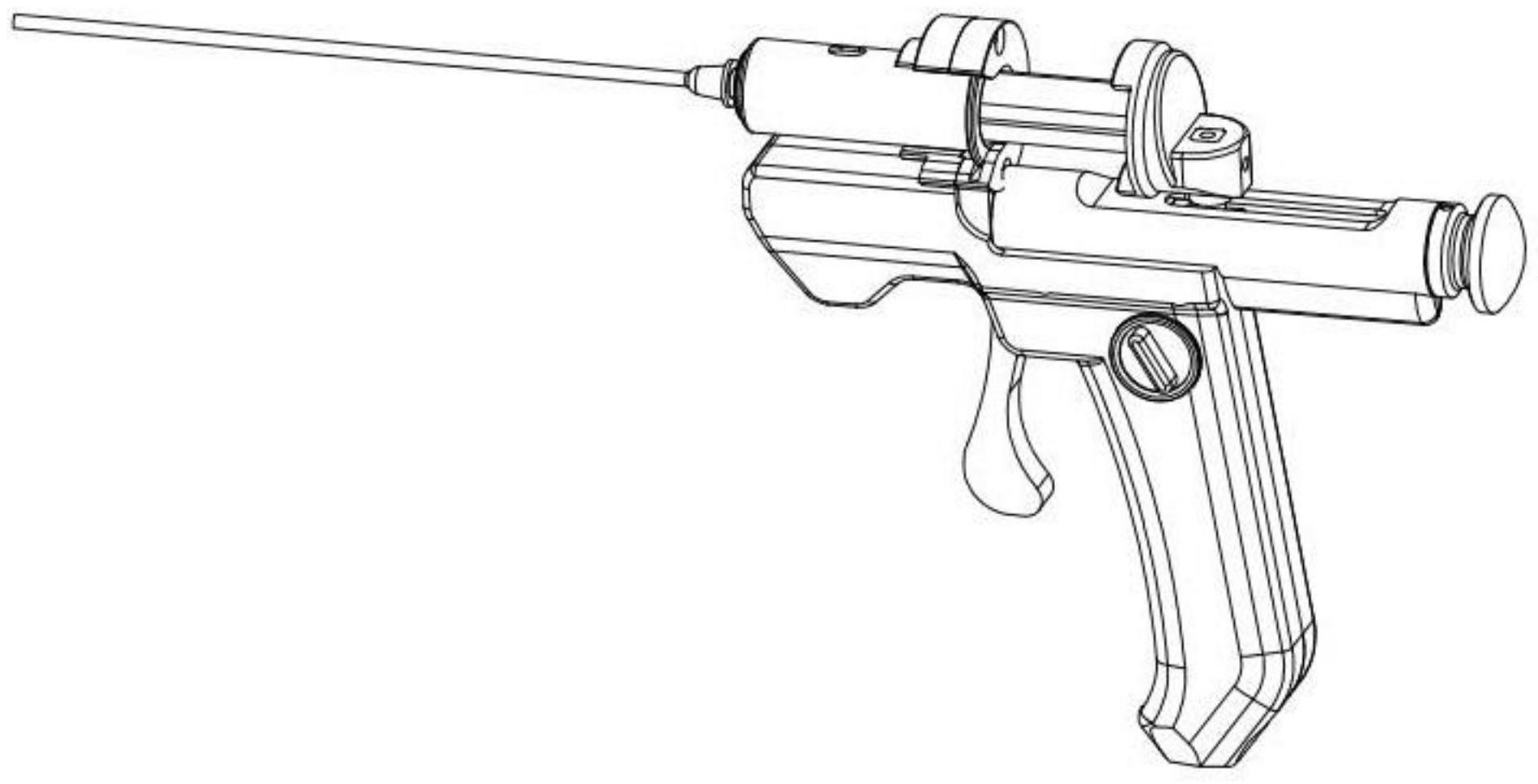
发明目的:针对上述现有技术,提出一种骨水泥电动推进枪,实现骨水泥稳定注射 且注射速度易控。 技术方案:一种骨水泥电动推进枪,包括注射器、注射器固定套、注射器推杆、电驱 直线运动机构、电池、扳机、第一传感器以及控制器;所述注射器固定套用于固定所述注射 器的针筒,所述注射器推杆用于连接所述注射器的活塞,所述电驱直线运动机构用于驱动 所述注射器推杆沿直线运动;所述第一传感器用于检测所述扳机绕转轴的转动角度并输传 感信号至所述控制器的信号输入端,所述控制器的信号输出端连接所述电驱直线运动机构 的控制信号输入端。 进一步的,所述控制器用于根据所述扳机绕转轴的转动角度大小输出驱动速度控 制信号到所述电驱直线运动机构。 进一步的,所述推进枪还包括握把,所述握把正对所述扳机的一侧设有第二传感 器,所述第二传感器输出检测信号到所述控制器的信号输入端,在所述第二传感器检测到 所述扳机处于最大可转动角位置时,所述控制器输出控制信号控制所述电驱直线运动机构 按预设最大驱动速度运行。 进一步的,还包括驱动速度调节旋钮,所述驱动速度调节旋钮的信号输出端连接 至所述控制器。 进一步的,所述控制器包括无线通信模块。 进一步的,还包括用于检测所述注射器推杆运行到终止位置的第三传感器,所述 3 CN 111568528 A 说 明 书 2/3 页 第三传感器连接所述控制器。 进一步的,所述电驱直线运动机构包括丝杠、电机、联轴器、立杆、光轴、轴承,所述 丝杠由螺杆和螺母组成;所述电机输出轴通过联轴器与螺杆的一端固连,所述轴承套接在 螺杆的另一端,所述螺母侧面设有圆弧形凹槽,所述光轴平行固定在所述螺杆侧面并与所 述圆弧形凹槽相嵌,所述立杆固定在所述螺母的顶部。 进一步的,所述注射器固定套为一侧开口的环形卡槽,所述环形卡槽的内侧沿圆 周设有容纳所述针筒端部凸缘的凹槽,所述注射器推杆包括活塞柄卡槽以及端盖,所述端 盖正面位于所述活塞柄卡槽入口处设有活塞柄限位凸起。 进一步的,所述螺杆的端部还固定套接有手动旋钮。 进一步的,所述扳机的转轴上安装有扳机回位弹簧。 有益效果:本发明的骨水泥电动推进枪,采用电动注射方式,能够稳定推进,解决 了传统手动推注的骨水泥装置在推注过程中会存在明显的晃动现象,且能够有效控制注射 速度,减轻医务人员操作的难度,降低骨水泥在注射管路及注射器内固化的风险。本骨水泥 电动推进枪能够便于医院人员根据需要控制不同注射速度进行实时调整,也能够按预先设 定速度或上位机设定速度进行注射骨水泥,操作模式丰富。 附图说明 图1为本发明骨水泥电动推进枪整体结构示意图; 图2为本发明骨水泥电动推进枪剖面图; 图3为本发明骨水泥电动推进枪爆炸图; 图4为电驱直线运动机构示意图; 图5为注射器固定套结构示意图; 图6为注射器推杆结构示意图。











