
技术摘要:
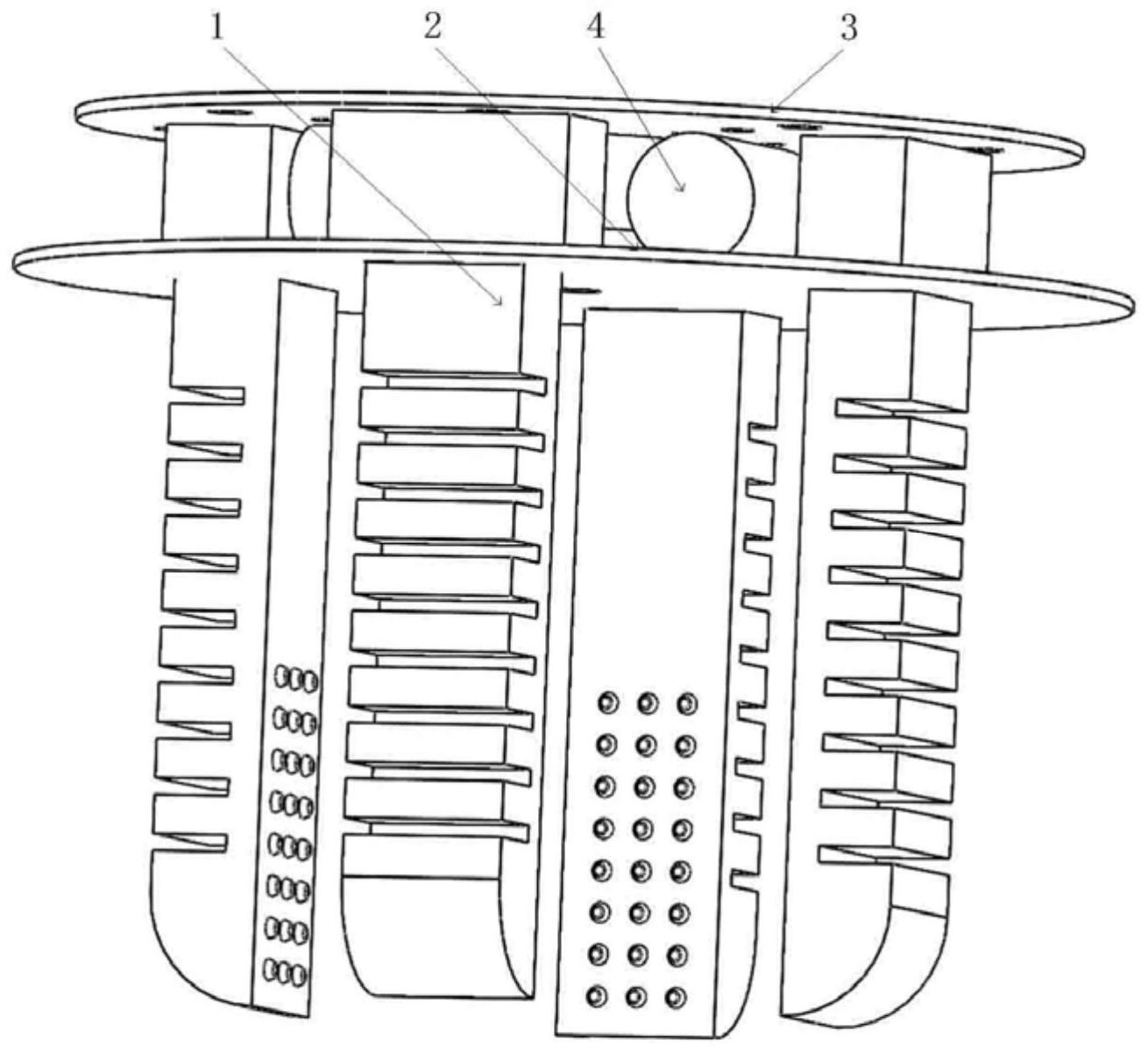
本发明属于机器人技术领域。目的是提供一种视觉辅助的水下液压软体夹爪,该水下液压软体夹爪具有抓取准确,结构简单且柔软,不会对抓取目标造成损伤,制造成本低,维修方便的优点。技术方案是:一种视觉辅助的水下液压软体夹爪,其特征在于:包括安装在水下机器人末端 全部
背景技术:
随着人类对地球的不断探索与开发,水下资源的开发逐渐成为重要的发展方向。 为了可以更深入地探索水下环境,开展研究,海洋装备、水下装备的研发需求也随之不断增 加。 机械手是抓取、采集、搬运物品的主要设备之一。目前,现有的水下机械手大部分 为刚性材料夹爪,其结构复杂,难以适应水下的复杂环境;制造成本高,维修困难,在实际水 上应用场景中一旦损坏,难以维修;刚度过大,在抓取、采集过程中容易对水下的采集目标 造成损坏。因此,有必要设计一种结构简易且柔软,制造方便,抓取稳定的水下软体夹爪。
技术实现要素:
本发明的目的是克服上述











