
技术摘要:
本申请实施例中提供了一种无人车车道级场景的判定方法、系统、终端及存储介质。通过对导航电子地图的路段进行车道级标注,得到车道级电子地图;然后,基于车道级电子地图,对无人车定位数据进行地图匹配,得到无人车车道级定位结果;最后,将无人车车道级定位结果与车 全部
背景技术:
无人驾驶技术作为学术界和产业界重要的研究方向,对于汽车行业乃至交通运输 业均有深远的影响。无人驾驶汽车能够解放人类的双手,降低交通事故发生的概率,保障人 们的安全。随着人工智能、传感检测等核心技术的不断发展,无人驾驶技术必将更加智能 化,并加快实现产业化。 驾驶场景是对无人车行驶过程中遇到的行驶环境的类型概括和表达,基于场景对 无人车行驶能力评估是发现无人车平台漏洞的一个必要手段。因此,准确完备的场景判定, 是对无人车进行能力评估的一个重要前提条件。在无人车测试场景中,有一类场景与车辆 行驶车道的判定密切相关,如逆行、潮汐车道行驶、停车入位的判定等等。在上述场景下,需 要实现无人车车道级的定位,以及基于场景定义实现无人车的行为能力评估。 在无人驾驶的背景下,中国专利号201811496440.5的专利公开的“无人驾驶汽车 测试方法、装置、电子设备及介质”的技术方案,给出了基于场景对无人车在封闭测试场内 行驶过程进行量化描述和指标统计的方法体系。其基于封闭测试场内典型化的道路类型, 定义对应的道路测试场景,并在电子地图上进行标注;将无人车的行驶过程定义为对场景 关联标注的路段的途经过程。通过采集无人车在行驶过程中的数据,与经过良好标注的测 试场电子地图路段进行时空关联分析,最终完成对无人车行驶过程的量化统计和评估。 以上技术给出了基于路段级场景对无人车行驶过程进行量化描述和指标统计的 通用方法体系,但一些无人车非常重要的测试场景,如车辆压实线、限行路段、车辆逆行、公 交车道、潮汐车道等,需要对无人车进行车道级定位,而车道级定位一般需要高精地图的支 持,其采集和应用的成本较高。因此,需要一种基于现有导航电子地图,对无人车进行车道 级场景判定,并进一步评估能力的方法。
技术实现要素:
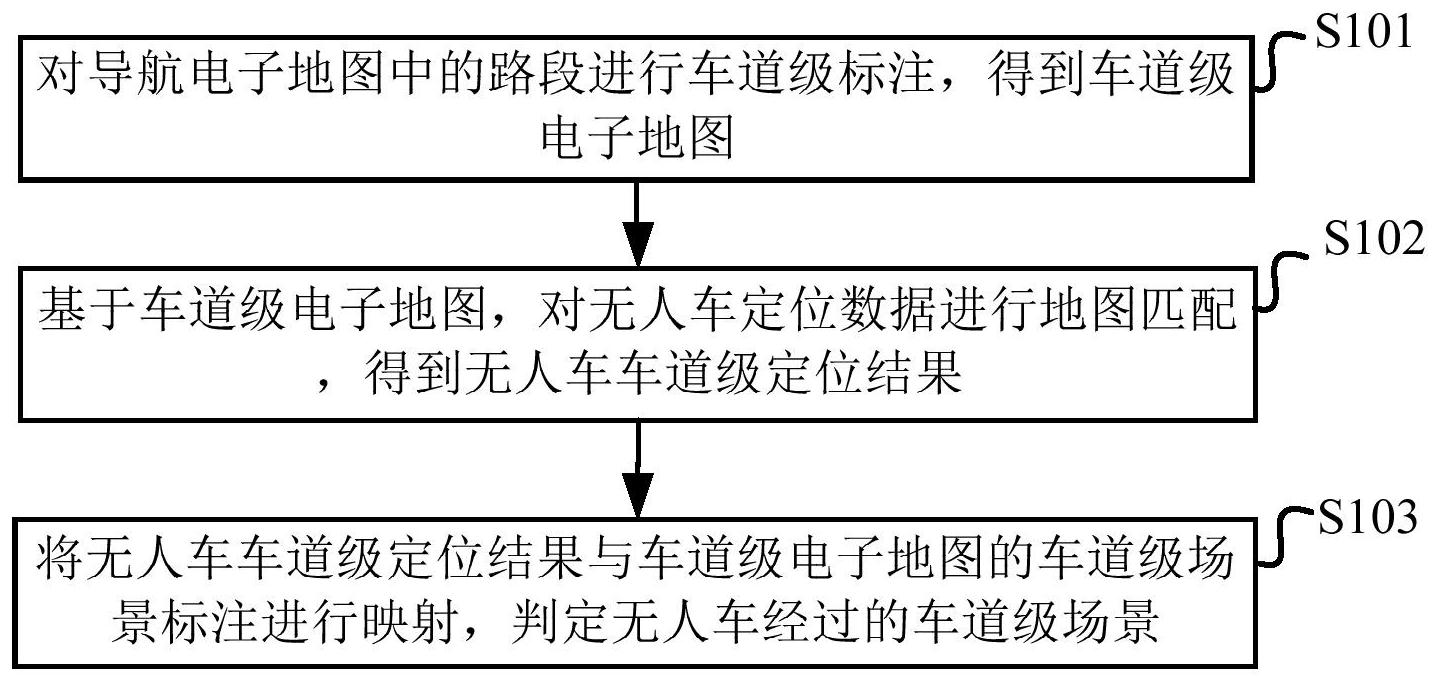
本发明提出了一种无人车车道级场景的判定方法、系统、存储介质及终端,旨在解 决无人车测试过程中进行车道级场景准确判定的问题。 根据本申请实施例的第一个方面,提供了一种无人车车道级场景的判定方法,包 括以下步骤: 对导航电子地图中的路段进行车道级标注,得到车道级电子地图; 基于车道级电子地图,对无人车定位数据进行地图匹配,得到无人车车道级定位 结果; 将无人车车道级定位结果与车道级电子地图的车道级场景标注进行映射,判定无 人车经过的车道级场景。 4 CN 111582019 A 说 明 书 2/10 页 可选地,对导航电子地图的路段进行车道级标注,得到车道级电子地图,具体包 括: 通过由n 1条车道线将导航电子地图的一个路段从左至右划分为n个车道; 计算路段线型到各个车道线型的Hausdroff距离; 路段的每一个车道采用三元组描述进行标记,描述公式为: lane=











