
技术摘要:
本发明一种机械臂进给式激光刻蚀系统的对刀方法属于特种加工领域,涉及一种基于机器视觉技术的机械臂进给式激光刻蚀系统的对刀方法。本发明通过对激光刻蚀系统优化改进,加设视觉传感器及主动投射指示激光器,增添系统内异种空间非合作机电设备间交互信息获取功能。虑 全部
背景技术:
典型的激光刻蚀是利用高能量密度的聚焦光能,依靠光热效应实现目标材料熔融 去除的先进工艺,类属无接触式特种加工,具有高参数可控性及强材料适应性,进一步,激 光刻蚀联合智能多轴驱动的工业机械臂可实现复杂加工环境及特殊曲面件的高精高效减 材加工。现有自行搭建的机械臂进给式激光刻蚀系统中,激光发生设备与工业机械臂分属 不同的独立控制系统,为异种空间非合作机电设备,常规信息通讯难以实现设备执行的精 准交互,而针对精密零件的激光刻蚀往往首要依赖对刀点的定位找正,即对刀精度直接影 响零件加工精度,应以工业机械臂理想起始点开始后续激光刻蚀流程。 专利号CN110722455A的《对刀装置及其对刀方法》采用带有压力传感器的对刀仪, 通过判断对刀仪上盖压力值是否满足预设值实现数控机床刀具接触式间接定位对刀,但对 刀过程极其依赖传感器分辨率与刀具实体特征,并且所测量参数有限,难以满足精度要求。 专利号CN110751690A的《铣床刀头视觉定位方法》采用工业相机对铣床刀具彩色图像特征 分析,通过深度卷积神经网络后处理得到高精度刀头位置,克服了金属的高光对光源的要 求及对刀具定位精度的影响,但该类刀具视觉定位仅适用于常规光照场景下反光金属刀具 定位,难以适配强对比度测量场景下极高亮度目标的辨识提取,极易受成像噪声干扰,具有 一定适用局限性。专利号CN110779506A的《一种双探头四激光束焦点定位装置》采用具有斜 置通孔的定位板,通过投射出厂焦距参数默认准确的两束定位激光穿过定位通孔,在定位 板后方与焦距待测主激光空间交互,由此辨识并校正主激光汇聚焦平面实现激光定位,但 定位过程需基于装置投射模型定制带通孔的定位板,难以应对主激光投射姿态动态变换场 景,同时定位激光出厂参数难以通过高级别传感器提前标定,极易引入测量装置固有误差。
技术实现要素:
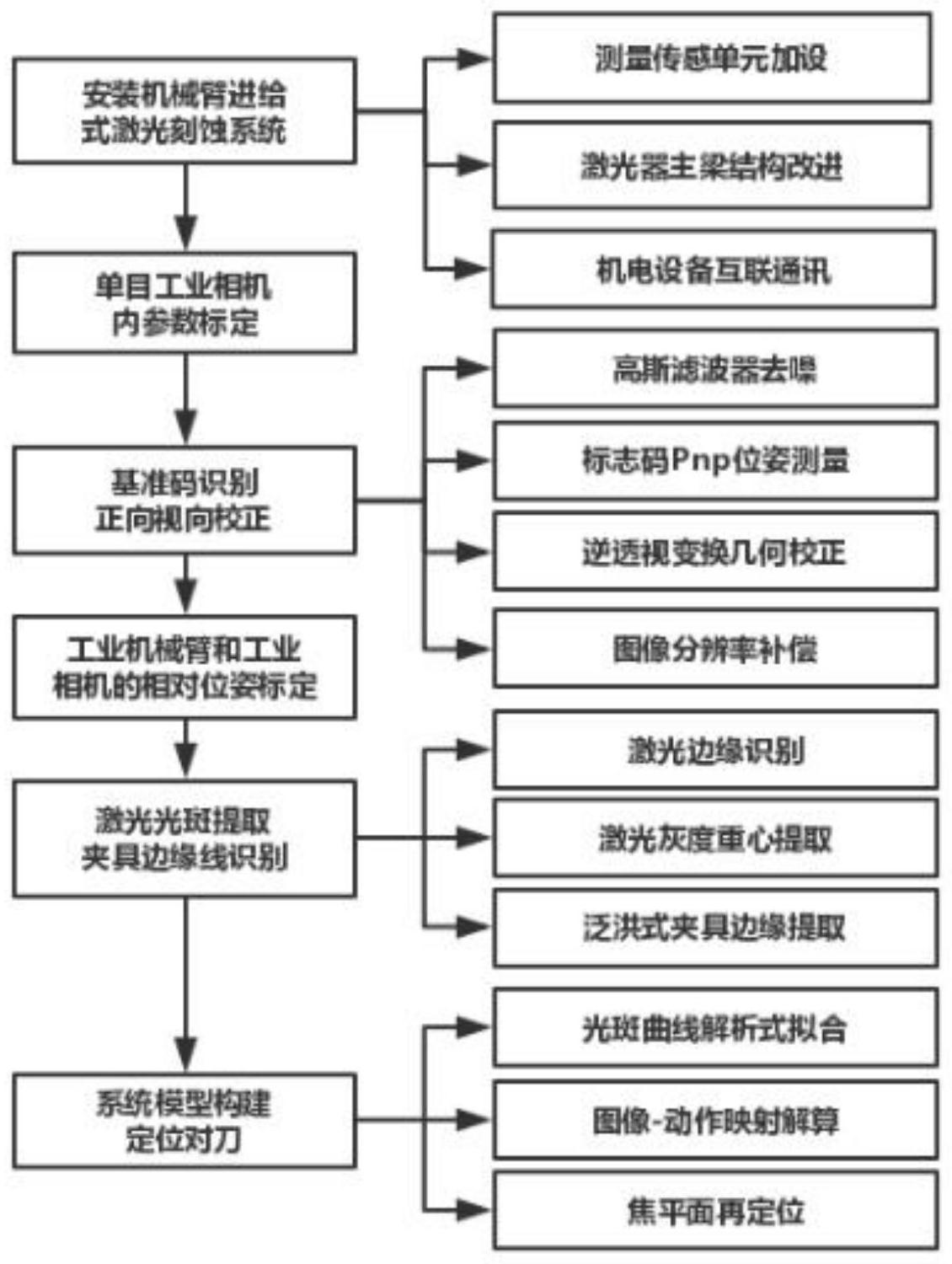
本发明主要解决的技术问题是克服现有技术的欠缺或不足,发明一种机械臂进给 式激光刻蚀系统的对刀方法,旨在面向空间非合作机电设备间相对位姿测量,通过将机器 视觉技术与工业机械臂空间运动控制技术相结合,实现激光刻蚀起始阶段的精确定位对 刀。将其应用于激光刻蚀过程中,解决了空间内激光刻蚀聚焦平面与零件起始待加工特征 点间的精确找正问题,提升目标工件的加工精度及成品质量。 本发明采用的技术方案是一种机械臂进给式激光刻蚀系统的对刀方法,其特征在 于,该方法基于单目视觉测量原理及主动结构光投射模型,通过对激光刻蚀系统优化改进, 在系统内部加设视觉传感器及主动投射指示激光器,增添系统内异种空间非合作机电设备 间交互信息获取功能;虑及倾斜视觉测量构型引入的非正视透视畸变及视觉传感器成像失 真问题,采用逆透视变换几何校正及相机畸变补偿技术,进行图像信息修正;基于经典视觉 12 CN 111604598 A 说 明 书 2/20 页 标定技术,对视觉传感器及手眼构型配置进行内外参数标定,构建加工系统中工业相机与 工业机械臂空间相对位置模型;结合多帧序列图像动态变换及多轴驱动进给装置空间形位 特征信息,基于运动与图像的调制-被调制映射关系解算,实现工作空间内激光刻蚀聚焦平 面与零件起始待加工特征点间的精确找正;机械臂进给式激光刻蚀系统的对刀方法具体步 骤如下: 步骤一,安装机械臂进给式激光刻蚀系统 机械臂进给式激光刻蚀系统中,工业机械臂6固定在工业机械臂基座13上,在工业 机械臂6末端安装夹具装载平台7;夹具装载平台7前端面上部装夹单目工业相机1,单目工 业相机1与水平地面呈70°俯倾角度斜置;夹具装载平台7下部安装环形工件夹具8,环形工 件夹具8顶端与夹具装载平台7前端面法向平行;单目工业相机1与环形工件夹具8相对位置 在加工全过程恒定;在环形工件夹具8顶面远离夹具装载平台7的端面,黏附两幅一组ArUco 方形基准码4,ArUco方形基准码4与环形工件夹具8顶面局部特征边缘共同处于单目工业相 机1有效可及视场内;在加工系统内部的水平地面上固定棋盘格标定板5;立式稳定台12安 装在工业机械臂6的前方,激光器主梁10安装在立式稳定台12前端面上,激光器主梁10的腔 体内安装有电源和绿色刻蚀激光器9;在激光器主梁10前端加装正交于主梁中线的方形模 块14,方形模块14内部横置红色指示激光器2及合束镜3,保持红色指示激光器2光轴与绿色 刻蚀激光器9光轴正交,共同指向出射口处合束镜3的中心;红色指示激光器2投射光束可由 扩束镜旋钮调节投射光斑直径及亮度,红色指示激光器2出射光路正交于绿色刻蚀激光器9 投射的刻蚀激光光路,两束偏振激光共同指向合束镜3中心;合束镜3与刻蚀激光光轴呈起 偏振角倾斜安置;据斯涅耳定律,设定θP为入射起偏振角,r1为空气标况折射率,r2为偏振片 标况折射率,有光学折射等式: r1sin(θp)=r2sin(90°-θp)=r2cos(θp) (1) 进而起偏振角 绿色刻蚀激光器9出射光束以相对起偏振角θP入 射穿过合束镜3的后透射镜面,与经前反射镜面反射的红色指示激光器2出射光束实现同轴 心合束; 其中,由单目工业相机1、红色指示激光器2、合束镜3、ArUco方形基准码4及棋盘格 标定板5构成定位对刀装置; 上位机11与电控设备相连,工业机械臂6、单目工业相机1、绿色刻蚀激光器9和红 色指示激光器2基于各自端口协议同上位机11建立通讯连接,多机电设备的协同动作统一 由上位机内置的过程控制软件实现调度; 步骤二,单目工业相机内参数标定 单目工业相机1内参数标定在系统外部执行,通过棋盘格标定板5基于经典张氏标 定法进行参数标定,即分别调整15种空间姿态拍摄棋盘格标定板5,求解多幅棋盘格标定板 5成像图与棋盘格标定板5空间物平面间单应性矩阵,施以通用旋转变换,联立多组方程求 解并辨识分离得到3×3归一化内参数矩阵 其中f为焦距,(uc,vc)为单目工业 13 CN 111604598 A 说 明 书 3/20 页 相机光轴同成像面交点坐标。 步骤三,基准码识别与正向视向校正 首先,对视场图像全域进行高斯滤波去噪,在预设标准差σ后,基于二维高斯分布 式: 计算中心锚点八领域 形成3×3高斯卷积核,并对图像全域进行遍历卷 积处理,滤除随机高斯噪声。 其次,统计目标图像域灰度分布情况,根据不同区域像素灰度分布,计算各区域局 部灰度阈值,对目标视场进行灰度自适应阈值分割,生成黑白像素表征的二值图像,进而对 上述二值图像进行Canny边缘识别,采用Hough变换提取直线特征,生成图像全域的特征轮 廓;已知ArUco方形基准码4为规则几何正方形,内部嵌套表征ArUco方形基准码4序号的二 维码,故提取特征轮廓图像中符合ArUco方形基准码4形状的完全闭合区域,由此提取得到 图像中ArUco方形基准码4的四边分别为l1、l2、l3、l4;基于预设二维码字典库,在两个闭合 区域内部遍历匹配二维码特征,识别ArUco方形基准码4二进制ID,实现目标视场内两幅 ArUco方形基准码4的识别与编号;ArUco方形基准码4正方形四角的像素坐标由图像中已识 别正方形四边l1、l2、l3、l4的交点确定,在提取方形四角点及周边特征基础上,采用单目视 觉P4p(Perspective-4-Points)测量技术,解算目标ArUco方形基准码4相对单目工业相机1 光心的位姿表征矩阵,具体为:设定ArUco方形基准码4正方形四个角点的基准码坐标系Pi =(Ui ,Vi ,Wi)下坐标值为 其 中ρ为ArUco方形基准码4实物边长。设定[RM|TM]为ArUco方形基准码4相对单目工业相机1光 心的旋转平移矩阵,四个角点对应图像域内图像坐标点p1(u1,v1),p2(u2,v2),p3(u3,v3),p4 (u4,v4),联合单目工业相机1内参数矩阵 定义透视模型为: 进而规定: 14 CN 111604598 A 说 明 书 4/20 页 则逆推得像点预估初值 为: 其中,i为对应角点编号,ε 2i与δi分别为服从高斯分布的白噪声,σ为白噪声方差, 再定义评价函数F为: 式中K1为常数,应用LM算法(Levenberg-Marquardt)对评价函数作负对数最小化 约束的迭代: 式中K2为常数,最后对所求最优解QR矩阵分解,分离得到ArUco方形基准码4相对 单目工业相机1的位姿表征矩阵[RM|TM]。 再次,在默认ArUco方形基准码4实物尺寸标值精确的基础上,将上述位姿表征矩 阵[RM|TM]法向下沉ArUco方形基准码4厚度值Δt,即得ArUco方形基准码4粘附处环形工件 夹具8上端面的局部位姿表征矩阵: [Rf|Tf]=[RM|TM][RΔt|TΔt] (8) 在ArUco方形基准码4周边li及周边li相交所得角点pi准确识别基础上,将图像域 内ArUco方形基准码4粘附区域以比例K倍相似扩展至可完全包络红色指示激光器2投射光 斑的尺寸,对该放大扩展域进行逆透视变换重投影:即设定(xo ,yo)为原始投影平面像点, (xt,yt)为规范化重投影面上对应像点,则有透视变换重投影映射公式: 其中, 表征缩放、剪切、旋转变换,[g h]表征平移,[c f]T表征透视映射。已 知ArUco方形基准码4正视投影下为规则几何正方形,则相应设定规范化投影面目标域为规 则正方形,且四角规范化投影面坐标依次为(0,0)、(1,0)、(0,1)、(1,1),在原始投影图像 中,由ArUco方形基准码4的四边相交提取得到的ArUco方形基准码4四个角点像素坐标设定 为(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4),定义: 15 CN 111604598 A 说 明 书 5/20 页 代入方程(9),联立得: 将式(11)回代到透视变换映射公式(9)中,对上述放大扩展域做重投影,可得正视 平行射影下的几何校正图,则后续单目工业相机1捕获图像均默认变为不存在倾斜透视畸 变的正视投影图。 最后,面向解决倾斜射影校正带来的图像远端分辨率稀疏的失真问题,结合对刀 装置视觉测量实际构型,定义简化后的中心投影相机倾斜射影模型为二维平面内中心投影 的三角形成像模型,该三角形成像模型有两段内部倾斜线。其中,三角形顶点表征单目工业 相机1光心,顶点向下延伸的垂线表征单目工业相机1光轴;三角形底边为校正线(面)S′,表 征校正后虚拟成像物面;三角下部倾斜线为物面S,表征实际成像物面,即环形工件夹具8上 端面的成像;三角上部倾斜线与下部倾斜线平行,表征单目工业相机1成像面s;光轴与物面 S/成像面s有夹角θf,物面S与校正面S′有夹角θ,则有 为便于确定像素信任的分 段分区,从以光心与物面S垂线为分割线的成像远端开始,将光心-纵向虚拟物点所成平面 做n次Δ=5°分度的扇形摆动,截交成像面s得到多段成像面s纵向分割线,截交校正面S′得 到多段校正面S′纵向分割线,对应设定线段a表征光心与校正面S′连线截得的局部物面,线 段b表征光心与校正面S′连线截得的局部校正面,线段c表征物面S与校正面S′截得的局部 光心-校正面线段,分别依次存在对角A、对角B及对角C,进而可得线段a的对角A=90°-n× 5°-θ,线段b的对角B=90° n×5°,线段c的对角A=θ。 已知正弦角定理: 16 CN 111604598 A 说 明 书 6/20 页 则在分度摆动过程中,基于单目工业相机1靶面尺寸、图像电子放大比例及校正图 像尺寸,可求得校正面S′与成像面s物理尺寸,进而线段a与线段b长度及其多段比例关系全 部可求,依据物面S与校正面S′多段截交线间距及其对应比例,辨识得校正面S′与物面S各 分段成像放大关系,设定图像全域的动态信任分段分区的权重值,降低成像畸变影响。 步骤四,工业机械臂和工业相机的相对位姿标定 工业机械臂6和单目工业相机1相对位姿标定过程为:控制工业机械臂6在三种不 同形位下对棋盘格标定板5拍摄成像,进而基于P4p(Perspective-4-Points)单目视觉测量 原理测量解算棋盘格标定板5相对单目工业相机1光心的位姿表征矩阵[R|T]c1、[R|T]c2、[R |T]c3及其位姿间变换阵 记录工业机械臂6末端当前位姿表征矩阵 [R|T]r1、[R|T]r2、[R|T]r3及其位姿间变换阵 规定单目工业相机1相 对工业机械臂6转换关系为 i与j对应位姿变换次序,经过坐标系转换可得: 展开得: 将 与 进行罗德里戈旋转变换为归一化旋转向量 与 则修正的罗德里戈姿态变化参数 与 为: 单目工业相机1相对工业机械臂6末端的初始旋转向量`P cr : 17 CN 111604598 A 说 明 书 7/20 页 单目工业相机1相对工业机械臂6末端的旋转向量 对旋转向量 进行罗德里戈反转换为旋转矩阵 回代到公式(14)中得 最终,得到单目工业相机1相对工业机械臂6末端的旋转变换矩阵 步骤五,激光光斑提取及夹具边缘线识别 对红色指示激光器2投射光斑边缘及重心进行提取识别,为便于红色指示激光器2 投射光斑的低损提取,对已几何校正的RGB原图像全域进行HSV颜色空间转换,即设目标图 像各像素点RGB值为(R,G,B),对(R,G,B)分量归一化处理得到(r,g,b),其中r=R/255,g= G/255,b=B/255,再经内部分量数值比对,预设Kmax=max(r,g ,b),Kmin=min(r,g ,b),Δ= Kmax-Kmin,则目标图像各像素点HSV各分量为: 面向红色指示激光器2投射光斑像素准确提取,在HSV色彩转换基础上,以红色指 示光颜色在HSV颜色空间中的先验参数为基准,经颜色直方统计区间参数再细化,设定提取 匹配区间,遍历目标图像,搜寻并记录符合要求的像素坐标,进而生成目标光斑像素点的像 素集合ΩL及新掩模二值图像I。预设形态学n×n矩形结构元素M,对二值图像I基于结构元 素M执行形态学闭运算 消除新掩模图像I有效区域内部因信息丢失造 成的像素空洞。接下来,对形态学修正后的二值图像I进行Canny算子边缘提取,进而得到红 色指示激光器2投射光斑边缘像素集合ΩE。为实现光斑中心 的识别定位,依据所记 18 CN 111604598 A 说 明 书 8/20 页 录红色指示激光器2投射光斑像素坐标集合ΩL,采用亚像素灰度重心法提取,即: 其中,G(u,v)为像素灰度值, 即为红色指示激光器2投射光斑亚像素重心。 最后,环形工件夹具8特征边缘的提取采用泛洪式图像填充算法。泛洪式图像填充 算法具体搜索流程为:在单帧二值图像中,经过人眼观测分辨,初步确定环形工件夹具8边 缘位置,交互选取多个边缘任意点为起始种子像素点P0,选用P0八领域 深度 优先搜索策略,以“不间断连通”为包容原则,剔除“间断”拒绝原则排除的局部邻域点,并将 搜索得到的领域像素点Pi作为新种子接续扩散,其中,部分错误选择的起始种子点P0及邻接 延伸像素在搜索过程中呈现局部连通或离散独立状态,难以有向接续扩散,由此判断该起 始种子点P0为误选取像素,进而终止该子搜索流程且直接剔除P0。最后,将多个种子起点P0 及其漫延生长得到的目标像素Pi集合归类为环形工件夹具8边缘,进而快速得到环形工件 夹具8边缘像素点集ΩF。 步骤六,系统模型构建及定位对刀 首先,已知基模高斯光束模型三维空间内几何模型为符合a2=b2的标准单叶双曲 面 曲面交x轴于(±a ,0,0),交y轴于(0,±b,0),沿激光传播方向的半径 变换遵循 双曲线延展,z为距焦平面距离,ω(z)为光斑半径,z0为瑞利长度。 由此,可得空间内实际光束传播单叶双曲面模型为: 在环形工件夹具8与红色指示激光器2投射光束的空间交互过程中,激光光束传播 受环形工件夹具8顶端面截断,在平面内投射形成二维特征光斑,并且红色指示激光器2投 射光斑几何形状随环形工件夹具8空间位姿变换而被调制变形。将红色指示激光器2投射光 斑被调制变形等效视为单叶双曲面(即红色指示激光器2出射光束)与任意空间平面Ax By Cz D=0(即环形工件夹具8上端面)的动态截交过程,结合空间单叶双曲面的平面截交线几 何规律,截交线几何形状可知为“椭圆曲线”或“对称卵形曲线”。特别,激光高斯光束瑞利长 度内近似准直,若实际瑞利长度接近或超出交互空间z向范围,激光光束的空间单叶双曲面 模型应简化为空间圆柱模型。 其次,结合红色指示激光器2投射光斑边缘像素集合ΩE成像几何的人工观测,初 步确定红色指示激光器2投射光斑成像的几何形状,进而在执行曲线拟合基础上,求解目标 曲线几何参数: 19 CN 111604598 A 说 明 书 9/20 页 ①若红色指示激光器2投射光斑成像确定为椭圆曲线,此时光束截交有两种情况: 1)环形工件夹具8上端面经过光束传播单叶双曲面x轴或y轴;2)环形工件夹具8上端面与瑞 利长度接近或超出交互空间z向范围的高斯光束截交。对红色指示激光器2投射光斑边缘像 素集合ΩE进行最小二乘椭圆拟合,基于平面椭圆一般式: x2 Axy By2 Cx Dy E=0(24) 对红色指示激光器2投射光斑轮廓测量点集以下式为目标函数进行拟合: 为使目标函数F最小,对式(25)求偏导,即: 由此得: 解方程得: 其中(x0,y0)为所拟合椭圆中心点图像坐标,θ为椭圆轴倾角,a、b分别为椭圆短轴 与长轴; ②若确定红色指示激光器2投射光斑成像为基本卵形曲线,此时环形工件夹具8上 端面不穿过单叶双曲面坐标轴,以任意空间姿态同双曲面截交。已知单叶双曲面由特征双 曲线围绕其主轴旋转而产生,任意空间平面与单叶双曲面截交所得卵形曲线,可由单叶双 曲面XOZ/YOZ投影面上直线与双曲线截交线段的几何参数等效描述。其中,双曲线内部截线 段长即为卵形对称中轴M长度,双曲线内部截线上点到双曲线水平距离的两倍值即为卵形 对应横轴N长度,设双曲线与直线相交式: 20 CN 111604598 A 说 明 书 10/20 页 解得交点P1(x1,y1)、P2(x2,y2),其中: 故卵形中轴长度为上述交点间距: 以卵形中轴M划分,设直线y=kx m在双曲线内部任一点为Qn,每个位置横轴N长度 为直线y=kx m任一点Qn平行于x轴交双曲线上点Pn到该任一点Qn的距离的二倍值,即N=2| Qn Pn|。由此,求得该对称基本卵形曲线的中轴M长度与各横轴N长度。 再次,控制工业机械臂6末端环形工件夹具8做多组连续的空间小幅度非正交试探 运动,对多次试探运动捕获的帧序列进行累积差分计算,设K为时间节点,imgK与imgK 1对应 时间K与K 1节点下图像全域像素,将imgK与imgK 1相减得到帧差分图像ΔimgK,设两帧间单 像素灰度变化均值Δimgavg为自适应阈值,Δimgavg定义为: 若帧差分图像中某像素点d(i,j)灰度值大于Δimgavg,则确定d(i,j)为运动像素 点。依次将多幅帧差分图像赋权ak,构成累积差分图像: 其中,权重ak取值取决于当前帧差分图像距离首帧的时序远近。在累积差分图像 Δimgcum中,多帧图像间红色指示激光器2投射光斑成像差异区域被分别赋权标识,基于单 帧投射光斑拟合所得几何参数,可有效辨识动态被调制过程中的红色指示激光器2投射光 斑变形参数。同时,据激光光学先验知识,激光光斑灰度重心在动态调制过程中具有一定平 移不变性及旋转不变性,则多帧图像中已识别的红色指示激光器2投射光斑灰度重心差分 为: 21 CN 111604598 A 说 明 书 11/20 页 整合差分信息构建图像雅克比矩阵具体过程为:设 为图像特征参数微分变化 量, 为笛卡尔空间运动微分变换量,J(r)是从笛卡尔空间运动微分空间到图像特征参数 微分空间的映射变换,则有图像雅可比矩阵: 使得微分映射关系式 成立,其中,m对应微分特征数量(对应 ),n为 任务间维数(对应 )。在时序可控的试探性动态调制过程中,帧间差分即为微分,则邻帧 imgK与imgK 1间红色指示激光器2投射光斑几何变形参数、光斑灰度重心差分信息、光斑-夹 具边缘间距等差分信息可视为图像特征微分变化量。同时,工业机械臂6末端环形工件夹具 8多次试探运动下的形位变换阵,可由工业机械臂6控制系统计算并读取,然后基于试探动 作时序求解形位变换速度阵,即对形位变换阵微分化,进而统一将图像特征微分变化量与 形位变换速度阵代入微分映射关系式 解得图像雅克比矩阵Jr(r),此即动 作-图像调制被调制映射矩阵。 然后,对绿色刻蚀激光器9出射激光的焦平面进行寻焦再定位,结合上步已解算映 射关系,将工业机械臂6末端环形工件夹具8上端面机动至与世界坐标系XOY面近似平行的 位置,并且单目工业相机1在当前有效视场内可捕捉到红色指示激光器2投射目标光斑。为 便于图像层面的光斑亮度判别,基于步骤五所得红色指示激光器2投射光斑像素集合ΩL, 将目标光斑基于亮度转换公式计算得到对应亮度值Y: Y=0.299×R 0.587×G 0.114×B (36) 进而,在环形工件夹具8上端面保持绝对水平的条件下,以亮度值Y数值变换趋势 突变为折返信号,驱动工业机械臂6做世界坐标系下Z向多步简谐运动,直到红色指示激光 器2投射光斑半径最小且亮度最高,则当前环形工件夹具8上端面距离激光出光口的距离为 红色指示激光器2出射激光的焦距,最后结合绿色刻蚀激光器9出射激光与红色指示激光器 2出射激光的焦距比值换算得到绿色刻蚀激光器9出射激光真实焦平面的相对位置。 最后,基于前述所得动作-图像映射关系及激光焦平面位置,结合CAM工艺规划的 加工起始点,进行最终定位对刀;对刀方法具体为:首先,基于动作-图像映射关系,调整工 业机械臂末6端环形工件夹具8空间位姿,使红色指示激光器2投射光束以相对垂直姿态对 准环形工件夹具8上端面。然后,调整环形工件夹具8空间z向位置,直到光斑呈半径最小、最 逼近圆形的形状。最后,基于CAM工艺规划的加工起始点位置,结合目标工件毛坯件及环形 工件夹具8几何模型,给定起始点处理想光斑成像信息,分析其与当前光斑成像差异,进而 计算对应运动信息,以步骤五已提取的环形工件夹具8边缘像素点集ΩF为运动基准,执行 机动,将红色指示激光器2投射光斑移动至对应加工起始点,实现定位对刀。 22 CN 111604598 A 说 明 书 12/20 页 本发明的显著效果是发明了确保空间内刻蚀激光聚焦平面与零件起始待加工特 征点间精准找正的机械臂进给式激光刻蚀系统的对刀方法。本发明采用单目视觉测量原理 及主动结构光投射模型,基于倾斜手眼式视觉测量构型设计,引入试探动作,结合多帧图像 分析及处理技术,完成了对机械臂进给式激光刻蚀系统的对刀,发明具有成像清晰稳定、找 正误差小、安装方便可调、结构简单等特点,适用于激光刻蚀起始阶段的加工原点坐标找 正,可提高激光刻蚀的柔性与零件的良品率。 附图说明 图1—机械臂进给式激光刻蚀系统的结构总图,图2—工业机械臂手部范围近景 图。其中,1-单目工业相机,2-红色指示激光器,3-合束镜,5-棋盘格标定板,6-工业机械臂, 7-夹具装载平台,8-环形工件夹具,9-绿色刻蚀激光器,10-激光器主梁,11-上位机,12-立 式稳定台,13-工业机械臂基座,14-方形模块。 图3—机械臂进给式激光刻蚀系统的对刀流程图。 图4—ArUco方形基准码4和棋盘格标定板5示例图。 图5—机械臂进给式激光刻蚀系统中单目工业相机1某时刻下捕获实景灰度图像; 其中,4-ArUco方形基准码,8-环形工件夹具。 图6—已逆透视几何校正的图像分辨率补偿模型图。 图7—红色指示激光器2出射激光光斑的椭圆拟合及其最小外接矩形局部放大图。 具体实施方法 为使本发明便于工程应用,下面将结合本发明提供的实施例及附图,对本发明涉 及的系统配置及使用方法进行清晰、完整地叙述: 附图1及附图2所示即为机械臂进给式激光刻蚀系统的结构总图和工业机械臂手 部范围近景图,其中,单目工业相机1、红色指示激光器2、合束镜3、ArUco方形基准码4、棋盘 格标定板5构成定位对刀装置。 发明实施例中:工业机械臂6采用是允载20kg的中轻载六轴串联工业机械臂;红色 指示激光器2采用电激励式驱动的半导体连续激光器,束腰半径为ωd=5mm、焦距fd= 150mm、瑞利长度为zd=123mm;绿色刻蚀激光器9为固体端面泵浦绿光激光器,束腰半径为 ωe=20μm、焦距fe=180mm;单目工业相机1为工业级CCD相机;ArUco方形基准码4实例材质 为无反光氧化铝,尺寸为1cm×1cm,厚度为0.15mm;棋盘格标定板5材质为覆有玻璃基板的 氧化铝板;工件特征为非可展半球壳状薄壁曲面;环形工件夹具8、夹具装载平台7及激光器 主梁10均为铝合金材质;数值计算及图像处理均借助微软Visual Studio 2013开发平台编 写的基于Opencv图像处理及Eigen矩阵运算开源库的多功能集成软件。附图3是机械臂进给 式激光刻蚀系统对刀流程图,方法的具体步骤如下: 步骤一,安装机械臂进给式激光刻蚀系统 机械臂进给式激光刻蚀系统中,工业机械臂6固定在工业机械臂基座13上,在工业 机械臂6末端安装夹具装载平台7;夹具装载平台7前端面上部装夹单目工业相机1,单目工 业相机1与水平地面呈70°俯倾角度斜置;夹具装载平台7下部安装环形工件夹具8,环形工 件夹具8顶端与夹具装载平台7前端面法向平行;单目工业相机1与环形工件夹具8相对位置 在加工全过程恒定;在环形工件夹具8顶面的远离夹具装载平台7的端面,黏附两幅一组尺 23 CN 111604598 A 说 明 书 13/20 页 寸为1cm×1cm的ArUco方形基准码4,默认标识为1号与2号,两幅ArUco方形基准码4与环形 工件夹具8顶面局部边缘特征共同处于单目工业相机1有效可及视场内,其中,ArUco方形基 准码4实例见附图4。将棋盘格标定板5固定在加工系统内部的水平地面上。 立式稳定台12安装在工业机械臂6的前方,激光器主梁10安装在立式稳定台12前 端面上,激光器主梁10的腔体内安装有电源和绿色刻蚀激光器9。在激光器主梁10前端加装 正交于主梁中线的方形模块14,方形模块14内部横置红色指示激光器2及合束镜3,保持红 色指示激光器2光轴与绿色刻蚀激光器9光轴正交,共同指向出射口处合束镜3中心;红色指 示激光器2投射光束可由扩束镜旋钮调节投射光斑直径及亮度;绿色刻蚀激光器9实例束腰 半径仅为ωe=20μm且光路不可见,将薄膜偏振片作为合束镜3实现两束激光合束;合束镜3 基底为双层BK7光学玻璃,设定有前反射镜面与后透射镜面,其前反射镜面表面覆镀Zr02高 反膜,大幅提升偏振激光反射率,后透射镜面可将起偏振角度入射的偏振激光低损透射。已 知偏振片标况折射率r2=1.51,空气标况折射率r1=1.00027,据公式(1),起偏振角: 则合束镜3与绿色刻蚀激光器9出射激光光轴呈56.478°角度安装,经绿色刻蚀激 光器9与红色指示激光器2焦距fd=150mm与fe=180mm转换后,后续对红色指示激光器2投射 光斑做识别定位等效于对绿色刻蚀激光器9出射激光进行处理。 工业机械臂6经由电控柜通过串口转TCP/IP转接板与上位机11建立连接,绿色刻 蚀激光器9和红色指示激光器2则基于RS232串口协议接收上位机11指令,单目工业相机1经 由FPGA图像采集卡与上位机11通讯,多机电设备协同运作统一由上位机11内置的过程控制 软件实现通讯与调度。 步骤二,单目工业相机内参数标定 在系统外部,基于经典张氏标定法指导单目工业相机1内参标定,在十五种空间位 姿下捕获棋盘格标定板5成像图,其中,棋盘格标定板5见附图4。软件解算得单目工业相机1 的3×3内参矩阵为: 步骤三,基准码识别与正向视向校正 图5为机械臂进给式激光刻蚀系统中单目工业相机1某时刻下捕获实景灰度图像; 以附图5为实例说明: 首先,预设标准差参数σ=0.8,代入公式(2)计算中心锚点八领域,以形成3×3高 斯卷积核 对图像全域进行遍历卷积处理,滤除随机高斯噪声。 其次,对目标视场内ArUco方形基准码4自适应阈值分割,提取内外部特征轮廓并 识别ArUco方形基准码4二进制ID,经软件图像识别,得到1号与2号ArUco方形基准码4四角 点亚像素坐标分别为: 24 CN 111604598 A 说 明 书 14/20 页 已知ArUco方形基准码4实物尺寸1cm×1cm,设定1号及2号ArUco方形基准码4方形 四角点的基准码坐标系P i= (U i ,V i ,W i)下坐标值为 代入透视模型式(3)得: 转换透视模型为公式(4)表征形式,据公式(5)逆推得到1号ArUco方形基准码4四 个角点预估初始值为 2号ArUco方形基准 码4为 将两幅ArUco方形基准 码4四角点预估初值表达式代入公式(6-7)计算,分离得到1号ArUco方形基准码4在单目工 业相机1光心坐标下位姿表征R1与T1分别为: R1=[0.493076 -2.12569 -0.127024]T1=[0.101871 -0.025205 0.142427] 2号ArUco方形基准码4在单目工业相机1光心坐标下位姿表征R2与T2分别为: R2=[0.523901 -0.125871 -1.233411] T2=[0.102355 -0.036362 0.142427] 再次,将上述1号ArUco方形基准码4位姿表征矩阵[R1|T1]法向下沉ArUco方形基准 码4的厚度值0.15mm,由式(8)得1号ArUco方形基准码4粘附处环形工件夹具8上端面的局部 位姿表征矩阵: 基于人工观测指导,将图像域内1号ArUco方形基准码4周边以比例3倍相似扩展至 可完全包络红色指示激光器2投射光斑的尺寸,设规范化投影面目标域为(0,0)、(1,0)、(0, 1)、(0 ,1),将原始投影平面测量得到的1号ArUco方形基准码4角点像坐标p1(2379 .00 , 25 CN 111604598 A 说 明 书 15/20 页 1332.00),p2(2202.32,1540.86),p3(2070.36,1349.08),p4(2234.06,1136.49)代入方程 (10-11)得: 进而: 将上述数值回代到透视变换映射公式(9),对放大扩展域做重投影,可得正视平行 射影下的几何校正图。因工业机械臂6与单目工业相机1的倾斜视觉测量构型在运动中恒定 不变,故该重投影几何校正矩阵在运动全程中可重用。 最后,面向解决倾斜射影校正带来的几何校正图像远端分辨率稀疏的失真问题, 基于上步所测1号ArUco方形基准码4的[R1|T1],结合RPY矩阵变换可反解得到相对单目工业 相机1光轴倾角θf=68.4326°。 令简化后的中心投影相机倾斜射影模型如附图6所示,其中,三角形顶点表征单目 工业相机1光心,顶点向下延伸的垂线表征单目工业相机1光轴;三角形底边为校正线(面) S′,表征校正后虚拟成像物面;三角下部倾斜线为物面S,表征实际成像物面,即环形工件夹 具8上端面的成像;三角上部倾斜线与下部倾斜线平行,表征单目工业相机1成像面s。光轴 与物面S/成像面s有夹角θf,物面S与校正面S′有夹角θ,可得θ=21.5674°。已知单目工业相 机1靶面尺寸为7.176mm×5 .319mm,成像面电子放大比例30倍,则成像面校正图像尺寸 253mm×167mm,从以光心与物面S垂线为分割线的成像远端开始,将光心-纵向虚拟物点所 成平面做10次Δ=5°分度的扇形摆动,分别截交物面S与校正面S′得到11条分段区域。在分 度摆动过程中依据正弦角定理公式(12),线段a与线段b长度及其远端侧多段比例关系全部 可求,解析得成像面s与校正面S′各分段以1:1.235、1:1.316、1:1.456、1:1.590、1:1.701、 1:1.863、1:2.032、1:2.991、1:3.290、1:3.597、1:4.222比例对应。由此可见,校正面远端部 分在正向视向校正后被拉伸放大,引入稀疏像素失真问题,进而可根据成像面s与校正面S′ 26 CN 111604598 A 说 明 书 16/20 页 对应区间比例,设定图像全域的动态信任分段分区的权重值,对超出放大置信区间的像素 区域降低处理信任度以降低成像畸变影响,便于后续图像的准确处理,具体为:对应附图5 及其校正图像,将比例1:2为置信分割阈值,后续图像处理步骤对比例1:2及其以下部分无 需预处理即直接采纳;对比例1:2以上部分做低权重标识,即在提取及交互环节避开该区域 涉及像素点,不予采用或少量采用。 步骤四,工业机械臂和工业相机的相对位姿标定 在机械臂进给式激光刻蚀系统中,多目标装置间坐标传递模型的准确建立是实现 加工系统视觉定位对刀的关键步骤。已知环形工件夹具8与单目工业相机1以相对固定位姿 安装于工业机械臂6末端(手部),单目工业相机1视觉测量所得环形工件夹具8局部位姿在 单目工业相机1光心坐标系下表征。面向环形工件夹具8及单目工业相机1空间位姿在工业 机械臂6基座坐标系下的准确描述,拟结合工业机械臂6多形位下棋盘格标定板5捕获成像 图及工业机械臂6形位转换矩阵,标定工业机械臂6与单目工业相机1的空间相对位姿关系, 进而构建环形工件夹具8、单目工业相机1、工业机械臂6的坐标传递模型。 控制工业机械臂6在三种不同形位下对棋盘格标定板5拍摄成像,分别读取得到单 目工业相机1与工业机械臂6的三种形位表征矩阵,进而分别解算得到两个单目工业相机1 位姿变换阵与两个工业机械臂6的位姿转换阵。其中,单目工业相机1的位姿变换阵为: 工业机械臂6的位姿转换阵为: 将单目工业相机1的位姿变换阵与工业机械臂6的位姿转换阵依次代入公式(13- 20)中,可得单目工业相机1相对工业机械臂6末端的旋转变换矩阵: 27 CN 111604598 A 说 明 书 17/20 页 此即为工业机械臂6与单目工业相机1的相对位姿阵。 步骤五,激光光斑提取及夹具边缘线识别 激光光斑提取及夹具边缘线识别是视觉定位对刀的首要前提。已知绿色刻蚀激光 器9与红色指示激光器2出射偏振光束通过合束镜3实现同轴合束,结合绿色刻蚀激光器9与 红色指示激光器2的光束标值焦距,对视觉可见的红色指示激光器2投射的指示激光光斑二 维成像信息进行解析提取,等效于对不可见的绿色刻蚀激光器9出射激光进行对应处理。同 时,为便于后续环形工件夹具8与红色指示激光器2投射激光光斑动态交互关系在图像层面 上的辨识,应对环形工件夹具8边缘线准确识别以提供交互目标与辨识基准。 首先,经过步骤三的基于逆透视变换重投影原理的正向视向校正,可知红色指示 激光器2投射激光光斑及环形工件夹具8的特征边缘在规范重投影成像面下的新图像符合 正向平行投影正视图。 其次,以附图5所提供图片为例,对红色指示激光器2投射激光光斑边缘及重心进 行提取识别。常规工业相机捕获图像原件均采用RGB三基色模式表征,RGB通过红(red)、绿 (green)、蓝(blue)三通道变化及叠加实现各式颜色表达,符合人眼观测所能感知的色彩信 息,而相较于RGB色彩空间,由色调(hue)、饱和度(saturation)及明度(value)组成的HSV色 彩空间对工业应用场景下的高亮度图像信息处理更为友好。对图像全域像素根据公式(21) 进行遍历色彩转换,将RGB色彩空间转至相对机器友好的HSV色彩空间,即已知红色的HSV模 糊分量区间为H(0~10)或(156~180)、S(43~255)、V(46~255),在此区间基础上直方统 计,进一步筛选细化区间,可得H(94~164)、S(105~177)、V(220~255),将图中符合细化区 间的像素点ΩL提取记录,并生成新掩模图像I,设定形态学5×5矩阵结构元素M,对图像I进 行形态学闭运算及Canny算子边缘提取得到光斑边缘像素集合ΩE,其中,形态学闭运算采 用模板遍历卷积形式,顺序执行连接局部离散像素点群实现形态学膨胀及分割离散边缘实 现形态学腐蚀。最后运用亚像素灰度重心法公式(22)计算得到红色指示激光器2投射激光 光斑亚像素中心为 最后,已知在消除图像噪声干扰基础上,单帧二值图像中目标物体特征边缘与背 景区域具有强区分度,边缘多像素点间互相邻接连通,整体分布呈现严格闭合状态,但鉴于 待处理二值图像中前景与背景像素特征信息繁多且分布紧密,常规边缘提取手段难以实现 快速找准目标物体特征边缘,而泛洪式图像填充算法可在一定人工指导基础上快速准确提 取边缘,且不受人工错误选取的非目标像素点干扰,具有强鲁棒性与高度准确性。以附图5 所提供图片为例,面向环形工件夹具8边缘线快速准确提取,在单帧二值图像中,经过人眼 观测分辨,初步确定环形工件夹具8边缘位置,交互选取多个边缘任意点为起始种子像素点 28 CN 111604598 A 说 明 书 18/20 页 P0,选择P0八领域 深度优先搜索策略,以“不间断连通”为包容原则,剔除“间 断”拒绝原则排除的局部邻域点,并将搜索得到的领域像素点Pi作为新种子接续扩散,漫延 搜索过程经有效判别自动滤除误选起始种子,进而将多个种子起点P0及其漫延生长得到的 目标像素Pi集合归类为环形工件夹具8边缘,快速得到环形工件夹具8边缘像素点集ΩF,提 取得共计12687个像素点为夹具边缘。 步骤六,系统模型构建及定位对刀 已知在静态单目视觉测量中,单帧图像表征被测量物体的某时刻成像信息,仅揭 示目标设备的当前静止状态,难以由此完全解算非合作设备间相对空间位姿。鉴于红色指 示激光器2与工业机械臂6呈空间非合作关联关系,引入环形工件夹具8与红色指示激光器2 投射光束的空间动作交互,通过工业机械臂6多步试探动作调制红色指示激光器2投射光斑 成像信息,在红色指示激光器2投射光斑拟合基础上,执行多帧图像累积差分处理,分析图 像帧间光斑形变趋势及位移参数,然后基于激光光束传递规律,解析动态下运动-图像的调 制被调制映射关系,求解环形工件夹具8与绿色刻蚀激光器9的空间相对位姿模型,最终在 前述步骤所得设备:环形工件夹具8、单目工业相机1、工业机械臂6的坐标传递模型基础上, 整合构建加工系统中全部设备包括绿色刻蚀激光器9、红色指示激光器2、单目工业相机1、 环形工件夹具8、工业机械臂6的空间相对位姿模型,进而结合CAM工艺规划结果执行对刀机 动,实现空间内激光刻蚀聚焦平面与零件起始待加工特征点间精确找正。 首先,实施例红色指示激光器2所投射基模高斯光束的束腰半径ωd=5mm、瑞利长 度zd=123mm,由式(23)得其空间几何模型为符合方程 的单叶双曲面, 考虑到后续试探交互动作的z向范围与激光光束的瑞利长度123mm接近,则可将单叶双曲面 近似视为空间圆柱模型,且所截交几何曲线为平面椭圆。将步骤五提取得到红色指示激光 器2投射光斑边缘像素集合ΩE的代入公式(24-28)中,得到当前拟合椭圆参数为a= 142.285、b=120.298、x0=1596.03、y0=608.365、θ=24.4382,红色指示激光器2投射激光 光斑边缘及拟合最小外接矩形如附图7所示。 其次,控制工业机械臂6末端环形工件夹具8做多组连续的空间小幅度的非正交试 探运动,对多次试探运动捕获的帧序列进行累积差分计算,得到帧间光斑几何变形参数、光 斑灰度重心差分信息、光斑-夹具边缘间距,进而结合动作参数解析动作-图像映射关系,又 已知环形工件夹具8边缘在单目工业相机1视场内成像恒定不变,由此将环形工件夹具8边 缘像素点集ΩF视为红色指示激光器2投射光斑灰度重心动态平移的辨识基准,判断两者趋 近-远离情况及测算间距。进而,将邻帧imgK与imgK 1间光斑几何变形参数、光斑灰度重心差 分信息、光斑-夹具边缘间距作为图像在动态被调制过程中的微分变化特征,结合环形工件 夹具8多次试探运动下的形位变换速度阵(微分阵),构建单目工业相机1内参已标定情况下 的参数已知简易图像雅克比矩阵。在工业机械臂视觉伺服控制领域,图像雅克比描述的是 图像特征运动和环形工件夹具8三维运动的关系,具体为:设定附图5所示为K时刻(即当前 零时刻),第一步K 1时刻试探动作为笛卡尔空间x向不动的翻转平移运动,依据公式(33- 29 CN 111604598 A 说 明 书 19/20 页 35)可得图像雅克比矩阵: 可见K 1时刻对应的动作-图像映射矩阵第一行第三列数值为0.0000,符合动作观 测及雅克比矩阵原理。接下来,复位到零时刻对应工业机械臂6的原形位,做K 2时刻笛卡尔 空间y向不动的翻转平移运动,依据公式(33-35)可得图像雅克比矩阵: 可见K 2时刻对应的动作-图像映射矩阵第二行第三列数值为0.0000,符合动作观 测及雅克比矩阵原理。继续复位到零时刻对应工业机械臂6的原形位,做K 3时刻笛卡尔空 间任意小幅度翻转平移运动,依据公式(33-35)可得图像雅克比矩阵: 进而做多次类似上述的解算步骤,最终得到以K时刻(即当前零时刻)为基准的任 意动作动作-图像映射关系。 再次,对绿色刻蚀激光器9出射激光的焦平面进行寻焦再定位,结合上步已解算映 射关系,驱动工业机械臂6末端环形工件夹具8上端面机动至近似平行于世界坐标系XOY面 的形位,并且保持红色指示激光器2投射光斑稳定清晰成像。据高斯激光光束模型 可知束腰处光斑半径最小且能量共聚,即在激光光束传播路径上,若环 形工件夹具8上端面恰好与红色指示激光器2出射光束束腰处平面严格重合,则当前红色指 示激光器2投射光斑亮度相较任意其他拦截成像位置为极大值,并且当前光斑半径为极小 值此时,对成像图基于步骤五所述内容提取红色指示激光器2投射光斑像素集合ΩL,依据 公式(36)进行亮度转换得到当前光斑亮度值Y,进而在环形工件夹具8上端面保持绝对水平 的条件下,以亮度值Y数值变换趋势突变为折返信号,控制工业机械臂6做世界坐标系下Z向 多步简谐运动,直到红色指示激光器2投射光斑半径最小且亮度最高,则当前环形工件夹具 8上端面距离激光器主梁10出光口的距离为红色指示激光器2出射激光焦距。同时,已知红 色指示激光器2焦距fd=150mm且绿色刻蚀激光器9焦距fe=180mm,进而驱动工业机械臂6继 续Z向平移-30mm,实现绿色刻蚀激光的真实焦平面定位。 最后,基于前述所得动作-图像映射关系及激光焦平面位置,结合CAM工艺规划的 加工起始点,进行最终定位对刀,对刀方法具体为:首先,基于动作-图像映射关系,调整工 业机械臂6末端环形工件夹具8空间位姿,使红色指示激光器2投射光束以相对垂直姿态对 准环形工件夹具8上端面。然后,调整环形工件夹具8空间z向位置,直到光斑呈半径最小、最 30 CN 111604598 A 说 明 书 20/20 页 逼近圆形的形状。最后,基于CAM工艺规划的加工起始点位置,结合目标非可展半球壳状薄 壁曲面工件及环形工件夹具8几何模型,给定起始点处理想红色指示激光器2投射光斑成像 信息,分析其与当前光斑成像差异,进而计算对应运动信息,以步骤五已提取的环形工件夹 具8边缘像素点集ΩF为运动基准,执行机动,将红色指示激光器2投射光斑移动至对应加工 起始点,实现定位对刀。 本发明实施例涉及的机械臂进给式激光刻蚀系统的对刀方法最终确保了空间内 刻蚀激光聚焦平面与零件起始待加工特征点间精准找正,发明具有成像清晰稳定、找正误 差小、安装方便可调、结构简单等特点,该对刀方法便于操作,适于工程实际应用。 31 CN 111604598 A 说 明 书 附 图 1/4 页 图1 图2 32 CN 111604598 A 说 明 书 附 图 2/4 页 图3 图4 33 CN 111604598 A 说 明 书 附 图 3/4 页 图5 图6 34 CN 111604598 A 说 明 书 附 图 4/4 页 图7 35











