
技术摘要:
本发明公开了一种低轨星座系统相位保持方法、系统、设备和存储介质,其中,该方法的步骤包括:根据卫星的参考平相位角和实际平相位角,确定卫星实际半长轴和参考半长轴的偏差以及偏差随时间的变化量;根据卫星实际半长轴和参考半长轴的偏差以及偏差随时间的变化量,确 全部
背景技术:
近年来,多个国家正在加速研制和部署大规模低轨星座系统。随着大规模低轨星 座的部署运行,星座系统将面临系统内部卫星间以及系统内部卫星与空间碎片的碰撞 威 胁。由于大气阻力等空间摄动的影响,卫星的相位将相对于参考相位发生长期变化, 从而 对空间轨道安全产生影响,为使低轨星座满足空间轨道安全要求,低轨星座的卫 星相位需 要保持在一定的较小区间内(例如参考相位的±0.1°以内)。此外,低轨星座 的覆盖范围约 束也要求卫星相位尽量保持在一定的较小区间内。 目前国内对卫星星座相位保持的研究主要针对中高轨星座,低轨卫星相位保持研 究较少。虽然,在低轨卫星相位保持研究方面,国内一些团队利用大气阻力实现低轨 卫星 星座的相对相位保持,仿真表明空气阻力进行相对相位保持可以实现稳定性很好 的星座 相对相位保持。通过对目标卫星实施一次相对基准卫星的轨道高度抬升/降低, 可以维持 星间的相对位置关系,在实际工程应用也表明了此策略的有效性。但是,以 上无论是采用 大气阻力被动控制,还是采用推力进行主动控制的低轨星座相位保持策 略,位置保持的精 度量级都超过了±1°,不符合低轨星座系统高精度相位保持要求(例 如±0.1°)。
技术实现要素:
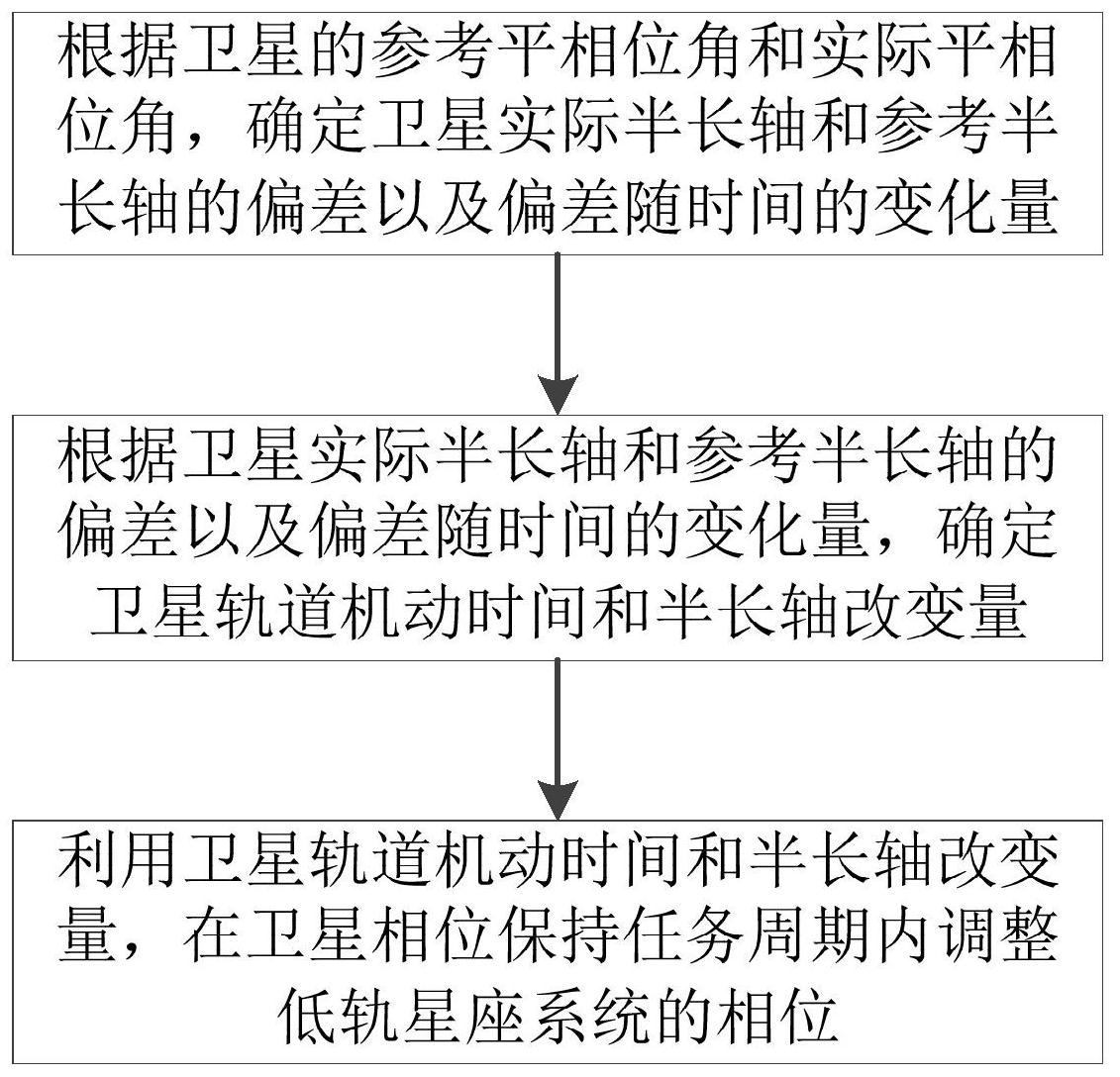
本发明的一个目的在于提供一种用于低轨星座系统的高精度相位保持方法、系 统、 设备和存储介质。 为达到上述目的,本方案采用下述技术方案: 第一方面,本发明提供一种低轨星座系统相位保持方法,该方法的步骤包括: 根据卫星的参考平相位角和实际平相位角,确定卫星实际半长轴和参考半长轴的 偏差以及偏差随时间的变化量; 根据卫星实际半长轴和参考半长轴的偏差以及偏差随时间的变化量,确定卫星轨 道机动时间和半长轴改变量; 利用卫星轨道机动时间和半长轴改变量,在卫星相位保持任务周期内调整低轨星 座系统的相位。 在一种优选地实施例中,所述根据卫星的参考平相位角和实际平相位角,确定卫 星实际半长轴和参考半长轴的偏差以及偏差随时间的变化量的步骤包括: 将卫星同一时刻的实际平相位角和参考相位角作差,获得卫星的平相位角偏差; 根据卫星半长轴随时间的变化趋势和平相位角偏差随时间的变化趋势,确定平相 位角偏差随时间变化的因子参数初值;所述相位角偏差随时间变化的因子参数包括: 初始 时刻的平相位角偏差、初始时刻的半长轴偏差导致平相位角漂移一阶项和半长轴 随时间 4 CN 111591469 A 说 明 书 2/13 页 线性变化导致平相位角漂移二阶项; 若某一时刻平相位角偏差预报值超出卫星的漂移边界,则以平相位角偏差随时间 变化的因子参数初值,作为确定卫星轨道机动时间和半长轴改变量的依据。 在一种优选地实施例中,所述根据卫星的参考平相位角和实际平相位角,确定卫 星实际半长轴和参考半长轴的偏差以及偏差随时间的变化量的步骤还包括: 若某一时平相位角偏差预报值未超出卫星的漂移边界,则重新确定该时刻的实际 平相位角和该时刻的卫星平相位角偏差,并根据重新确定的该时刻的卫星平相位角偏 差 更新平相位角偏差随时间变化的因子参数,直至该时刻的平相位角度偏差超出漂移 边界。 在一种优选地实施例中,所述参考平相位角的确定方式为: 根据地球中心引力场和地球非球形摄动,确定卫星的参考平相位角随时间的一阶 变化率; 根据卫星在卫星相位保持任务周期的初始时刻时的参考相位角和卫星的参考平 相 位角随时间的一阶变化率,确定卫星在某一时刻的参考相位角。 在一种优选地实施例中,所述实际平相位角的确定方式为:从卫星相位保持任务 周期的初始时刻开始,在某一段时间内每隔固定时长采样一次卫星的位置和速度,并 将其 转化为实际平相位角。 在一种优选地实施例中,根据卫星实际半长轴和参考半长轴的偏差以及偏差随时 间的变化量,确定卫星轨道机动时间和半长轴改变量的步骤包括: 根据平相位角偏差随时间变化的因子参数,确定当前相位保持任务周期的初始时 刻的实际半长轴与参考半长轴的偏差; 根据轨道半长轴随时间的一阶线性变化率,确定当前相位保持任务周期的自由漂 移结束时刻的实际半长轴和参考半长轴的偏差; 根据平相位角偏差区间和半长轴随时间线性变化导致平相位角漂移二阶项,确定 卫星下一相位保持两次轨道高度抬升之间的时长; 根据两次轨道高度抬升之间的半长轴漂移量,确定轨道机动的半长轴改变量。 在一种优选地实施例中,该方法的步骤还包括: 将当前卫星相位保持任务周期的初始时为上一卫星相位保持任务周期的结束时 刻。 第二方面,本方案提供一种低轨星座系统相位保持系统,该系统包括: 偏差计算模块,根据卫星的参考平相位角和实际平相位角,确定卫星实际半长轴 和参考半长轴的偏差以及偏差随时间的变化量; 控制量计算模块,根据卫星实际半长轴和参考半长轴的偏差以及偏差随时间的变 化量,确定卫星轨道机动时间和半长轴改变量; 调整模块,利用卫星轨道机动时间和半长轴改变量,在卫星相位保持任务周期内 调整低轨星座系统的相位。 第三方面,本方案提供一种设备,包括:存储器,一个或多个处理器;存储器与 处 理器通过通信总线相连;处理器被配置为执行存储器中的指令;所述存储介质中存 储有用 于执行如上所述方法中各个步骤的指令。 第四方案,本方案提供一种计算机可读存储介质,其上存储有计算机程序,该程 5 CN 111591469 A 说 明 书 3/13 页 序被处理器执行时实现如上所述方法的步骤。 本发明的有益效果如下: 本申请所述技术方案可以用于实现低轨星座系统高精度相位保持,能够在卫星位 置速度确定精度不高、而且定位数据采样率较低的情况下,实现高精度相位保持(精 度要 求例如±0.1°),降低了高精度相位保持对卫星定轨精度以及定轨数据采样存储要 求。 附图说明 为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例, 对 于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图 获得其 他的附图。 图1示出本方案所述低轨星座系统相位保持方法的示意图。 图2示出本方案实施例所述不施加控制的平相位角偏差的时间历程:2-a为仿真时 间10天的示意图;2-b为仿真时间内10个轨道周期。 图3示出本方案实施例所述相位保持任务周期内,平相位角偏差的瞬时轨道值和 平均轨道值的时间历程:3-a为仿真时间365天的结果;3-b为仿真60天的局部结果。 图4示出本方案实施例所述相位保持任务周期内,平相位角偏差的瞬时轨道值的 时间历程:4-a为仿真时间365天的结果;4-b为仿真时间60天的局部结果。 图5示出本方案实施例所述相位保持任务周期内,平相位角偏差的平均轨道值的 时间历程:5-a为仿真时间365天的结果;5-b为仿真时间60天的局部结果。











