
技术摘要:
一种清扫系统。所述清扫系统包括:远程控制器,被构造为发射红外线和可见光;清扫机器人,被构造为跟踪从远程控制器发射的红外线,其中,远程控制器包括:可见光源,被构造为发射可见光;红外线光源,被构造为发射红外线;透镜,被构造为折射红外线和可见光,其中,可 全部
背景技术:
清扫机器人是一种在没有用户操作的情况下,通过在扫地空间行驶的同时吸入地 板上堆积的灰尘等异物,从而自动清扫扫地空间的装置。即,清扫机器人在扫地空间行驶的 同时清扫扫地空间。 在用户希望首先清扫扫地空间中的特定位置的情况下,现有清扫机器人需要用户 直接确认清扫机器人的位置并利用远程控制器而使清扫机器人移动至特定位置。 但是,在用户无法得知清扫机器人的位置的情况下,用户需要找到清扫机器人,在 清扫机器人清扫沙发或者床等的底部时,用户难以找到清扫机器人。 并且,为了使清扫机器人移动至特定位置,用户需要利用远程控制器而对清扫机 器人的行驶进行操作,因此存在不便。 并且,最近对无如上的不便地使清扫机器人移动至特定位置的方法的研究正在活 跃地进行着。
技术实现要素:
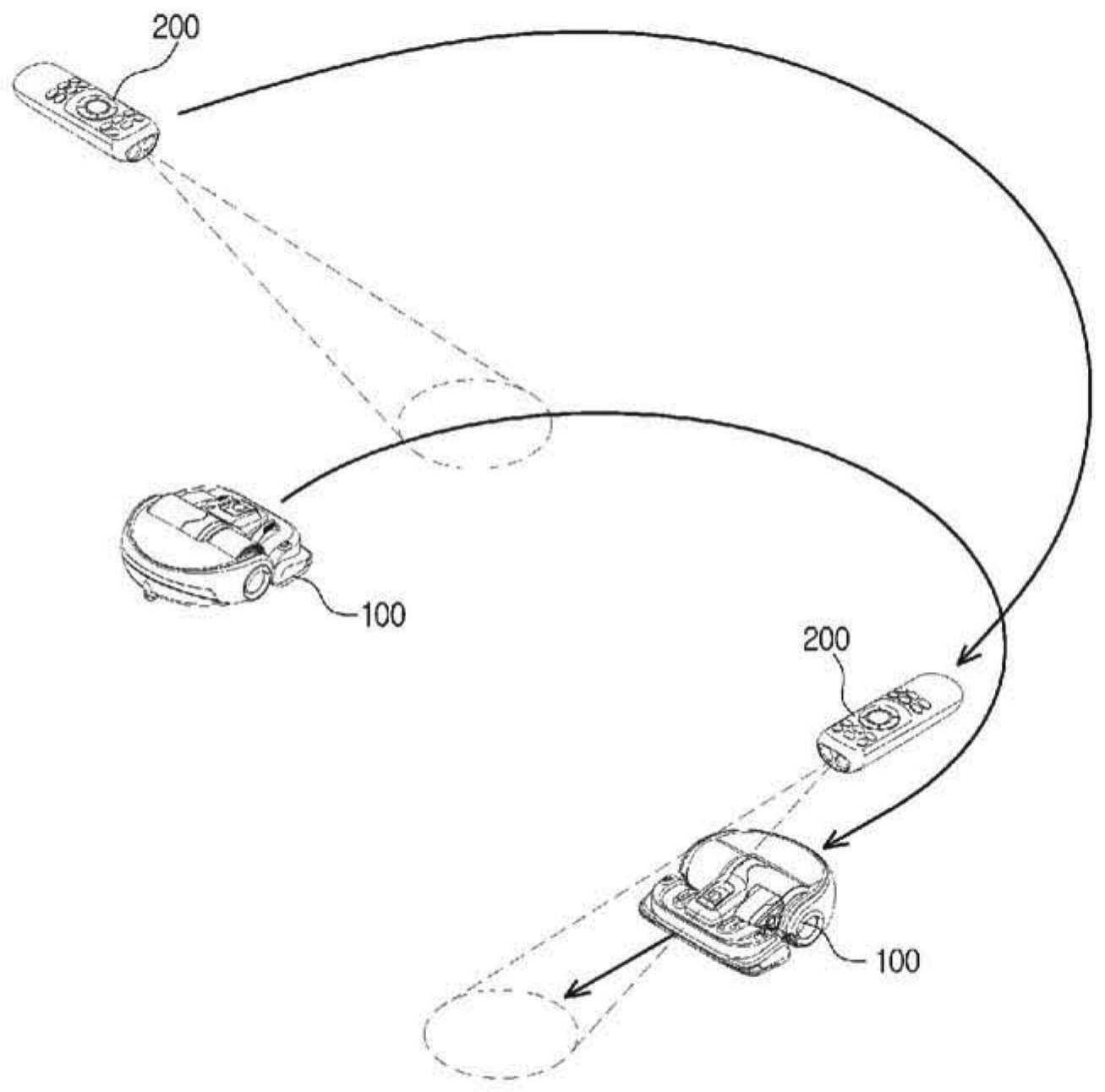
技术问题 为了解决上述问题,公开的发明的一方面的目的在于,提供一种清扫机器人追踪 远程控制器所指示的位置的清扫机器人以及包含于此的远程控制器。 公开的发明的另一方面的目的在于,提供一种能够计算距由多个信号感测部感测 到的远程控制器的距离以及远程控制器的方向的清扫机器人、清扫机器人系统和清扫机器 人系统的控制方法。 技术方案 根据公开的发明的一方面的清扫机器人可以包括:行驶器,用于使主体移动;远程 控制器,用于输出根据用户的控制命令而被调制的红外线,并形成光斑;光接收器,用于从 所述远程控制器接收红外线;控制器,如果接收到根据所述控制命令而被调制的红外线,则 控制所述行驶器而使所述主体追踪所述光斑。 根据实施形态,所述远程控制器可以包括:用户界面,用于接收所述用户的控制命 令;光发送器,根据所述控制命令而调制红外线,并发射被调制的红外线。 根据实施形态,所述光发送器可以包括:红外线调制器,根据所述用户的控制命令 而生成调制信号;红外线发送器,根据所述调制信号而发射红外线;可视光线发送器,发射 4 CN 111568317 A 说 明 书 2/61 页 可视光线以形成所述光斑。 根据实施形态,所述光接收部可以包括:多个红外线接收器,用于接收所述红外 线;红外线解调器,用于解调接收的红外线而获得所述控制命令。 根据实施形态,所述多个红外线接收器可以包括:位于所述主体的前方的第一红 外线接收器;沿着所述主体的外廓线布置的至少2个红外线接收器。 根据实施形态,所述控制器可以根据所述多个红外线接收器中的接收到所述红外 线的红外线接收器而判断所述光斑的位置。 根据实施形态,所述控制器可以使所述主体移动,以使所述第一红外线接收器接 收到所述红外线。 根据实施形态,所述控制器可以使所述主体旋转以使所述第一红外线接收器接收 到所述红外线,然后使所述主体向所述光斑进行直线移动。 根据实施形态,所述控制器可以使所述主体进行曲线移动,以使所述第一红外线 接收器接收到所述红外线。 根据实施形态,如果在沿着自动清扫路径而移动的过程中,从所述远程控制器接 收到的拖动命令,则所述控制器可以控制所述行驶器以使所述主体沿着所述光斑的移动路 径移动。 根据实施形态,如果所述拖动命令的接收被中断,则所述控制器可以通过控制所 述行驶器而停止所述主体的移动,并使所述主体返回所述自动清扫路径。 根据实施形态,如果接收到路径存储命令,则所述控制器可以通过控制而使所述 主体沿着所述光斑的移动路径而移动,并存储所述主体的移动路径。 根据实施形态,如果接收到自动清扫命令,则所述控制器可以通过控制所述行驶 器而使所述主体沿着所述主体的移动路径进行移动。 根据实施形态,如果接收到集中清扫命令,则所述控制器可以通过控制所述行驶 器而使所述主体在所述主体的移动路径内部进行移动。 根据实施形态,如果接收到禁止进入命令,则所述控制器可以通过控制所述行驶 器而防止所述主体进入所述主体的移动路径内部。 根据实施形态,所述清扫机器人还可以包括:障碍物感测部,用于感测妨碍所述主 体的移动的障碍物。 根据实施形态,如果在所述光斑的移动路径上感测到障碍物,则所述控制器可以 通过控制所述行驶器而使所述主体沿所述着障碍物的外廓线而追踪所述光斑。 根据实施形态,所述清扫机器人还可以包括:台阶感测部,用于感测妨碍所述主体 的移动的台阶。 根据实施形态,如果在所述光斑的移动路径上感测到障碍物,则所述控制器可以 通过控制所述行驶器而使所述主体沿着所述台阶的外廓线而追踪所述光斑。 根据实施形态,如果判断为所述光斑的移动路径经过禁止进入区域,则所述控制 器可以通过控制所述行驶器而使所述主体沿着所述禁止进入区域的外廓线而追踪所述光 斑。 根据公开的一方面的远程控制器可以包括:用户界面,用于输入用户的控制命令; 光发送器,用于发射可视光线和红外线;控制器,用于控制所述光发送器而发射根据所述控 5 CN 111568317 A 说 明 书 3/61 页 制命令而被调制的红外线,其中,所述光发送器可以包括:红外线发送器,用于发射被调制 的所述红外线以形成红外光斑;可视光线发送器,用于发射所述可视光线以形成可视光线 光斑。 根据实施形态,所述红外线发送器可以包括:红外线发光二极管,用于发射所述红 外线;集光板,反射所述红外线以使所述红外线集光;集光透镜,用于折射所述红外线以使 所述红外线集光。 根据实施形态,可视光线发送器可以包括:可视光线发光二极管,用于发射可视光 线;集光板,使所述可视光线反射以使所述可视光线集光;集光透镜,用于折射所述可视光 线以使所述可视光线集光。 根据实施形态,由红外线发送器形成的红外光斑和由可视光线发送器而形成的可 视光斑可以以至少一部分重叠的方式形成。 根据公开的发明的另一方面的清扫机器人可以包括:多个信号接收部,接收从远 程控制器输出的红外线信号和超声波信号中的至少一个;以及控制部,利用接收到的红外 线信号和超声波信号中的至少一个而计算距远程控制器的距离以及远程控制器的方向。 根据实施形态,信号接收部可以包括:多个光接收部,接收从远程控制器输出的红 外线信号;多个声波接收部,接收从远程控制器输出的超声波信号。 根据实施形态,控制部可以基于接收到红外线信号的时间和接收到超声波信号的 时间之差而计算距远程控制器的距离。 根据实施形态,信号接收部可以接收根据预设的距离不同而不同的多个红外线, 控制部基于接收的红外线信号的种类而计算距远程控制器的距离。 根据实施形态,控制部可以根据从多个信号接收部中接收的各个超声波信号的强 度而计算远程控制器的方向。 根据实施形态,控制部可以根据从多个信号接收部中接收的各个超声波信号的接 收时间而计算远程控制器的方向。 根据实施形态,控制部可以利用多个信号接收部中的接收到红外线信号的信号接 收部的位置而计算远程控制器的方向。 根据实施形态,清扫机器人还可以包括行驶部,用于使主体移动,其中,控制部通 过控制行驶部而使主体旋转,直到多个信号接收部中的预设的信号接收部接收到红外线信 号为止。 根据实施形态,光接收部可以包括:红外线接收器,用于接收红外线信号;以及光 接收驱动电机,用于使主体的上部旋转,其中,控制部控制光接收驱动电机而使配备有多个 光接收部的清扫机器人的上部旋转,直到多个光接收部中的预设的光接收部接收到红外线 信号为止。 根据实施形态,清扫机器人可以包括:行驶部,用于使主体移动;以及第一通信部, 用于从远程控制器接收在指示指定开始区域的时间点感测到的动作以及在指示指定结束 区域的时间点感测到的动作,其中,控制部基于在指示指定开始区域的时间点的动作以及 在指示指定结束区域的时间点的动作而设定指定结束区域的坐标,并控制行驶部而使主体 移动至设定的坐标。 根据公开的发明一方面的清扫机器人系统可以包括:远程控制器,用于输出红外 6 CN 111568317 A 说 明 书 4/61 页 线信号和超声波信号中的至少一个;以及信号接收部,接收输出的红外线信号和超声波信 号中的至少一个,并且可以包括:清扫机器人,利用接收到的红外线信号和超声波信号中的 至少一个而计算距远程控制器的距离和远程控制器的方向。 根据公开的发明的一方面的清扫机器人的控制方法可以包括以下步骤:从远程控 制器输出红外线信号和超声波信号中的至少一个;用多个信号接收部接收所输出的红外线 信号和超声波信号中的至少一个;以及利用接收到的红外线信号和超声波信号中的至少一 个而计算距远程控制器的距离和远程控制器的方向。 有益效果 根据公开的发明的一方面,因为清扫机器人追踪远程控制器所指示的位置,所以 用户可以方便地使清扫机器人移动。 根据公开的发明的另一方面,可以通过指定开始和停止区域而使清扫机器人移动 至指定结束区域。 附图说明 图1简略地示出根据一实施例的清扫机器人和远程控制器的操作。 图2简略地示出根据一实施例的远程控制器的构成。 图3简略地示出根据一实施例的清扫机器人的构成。 图4示出根据一实施例的远程控制器的构成。 图5示出根据一实施例的远程控制器的外观。 图6a和图6b示出根据一实施例的远程控制器中包含的光发送部。 图7示出根据一实施例的远程控制器将光照射到清扫区域而生成的光斑。 图8示出根据一实施例的远程控制器生成的光斑的一个示例。 图9示出根据一实施例的清扫机器人的构成。 图10示出根据一实施例的清扫机器人的外观。 图11示出根据一实施例的清扫机器人的内部。 图12示出根据一实施例的清扫机器人的底面。 图13示出根据一实施例的清扫机器人能够感测红外线的红外线感测范围。 图14a和图14b示出随着根据一实施例的远程控制器的位置而变化的根据一实施 例的清扫机器人的红外线感测范围。 图15示出根据一实施例的清扫机器人追踪光斑的光斑追踪方法。 图16a、图16b、图17a和图17b示出根据一实施例的清扫机器人追踪光斑的一个示 例。 图18示出根据一实施例的清扫机器人集中清扫指定位置的集中清扫方法。 图19a、图19b和图19c示出根据一实施例的清扫机器人集中清扫指定位置的一个 示例。 图20示出根据一实施例的清扫机器人生成新的清扫路径的清扫路径生成方法。 图21a、图21b和图21c示出根据一实施例的清扫机器人生成清扫路径的一个示例。 图22示出根据一实施例的清扫机器人沿着根据图20中示出的方法生成的清扫路 径移动的一个示例。 7 CN 111568317 A 说 明 书 5/61 页 图23示出根据一实施例的清扫机器人生成集中清扫区域的集中清扫区域生成方 法。 图24a、图24b和图24c示出根据一实施例的清扫机器人生成集中清扫区域的一个 示例。 图25示出根据一实施例的清扫机器人清扫根据图23中示出的方法生成的集中清 扫区域的一个示例。 图26示出根据一实施例的清扫机器人生成禁止进入区域的禁止进入区域生成方 法。 图27a、图27b和图27c示出根据一实施例的清扫机器人生成禁止进入区域的一个 示例。 图28示出根据一实施例的清扫机器人回避根据图26中示出的方法生成的禁止进 入区域的一个示例。 图29示出根据一实施例的清扫机器人在回避障碍物的同时追踪光斑的光斑追踪 方法。 图30a、图30b和图30c示出根据一实施例的清扫机器人在回避障碍物的同时追踪 光斑的一个示例。 图31示出根据一实施例的清扫机器人在回避禁止进入区域的同时追踪光斑的光 斑追踪方法。 图32a、图32b和图32c示出根据一实施例的清扫机器人在回避禁止进入区域的同 时追踪光斑的一个示例。 图33示出根据一实施例的清扫机器人在回避台阶的同时追踪光斑的光斑追踪方 法。 图34a、图34b和图34c示出根据一实施例的清扫机器人在回避台阶的同时追踪光 斑的一个示例。 图35示出根据一实施例的清扫机器人通过光斑的动作而从用户接收控制命令的 动作命令接收方法。 图36、图37和图38示出根据一实施例的清扫机器人通过光斑的动作而从用户接收 控制命令的一个示例。 图39示出根据一实施例的清扫机器人显示光斑被感测的位置的方法。 图40a、图40b、图40c和图40d示出根据一实施例的清扫机器人显示光斑被感测的 位置的一个示例。 图41a、图41b、图41c、图41d和图41e示出根据一实施例的清扫机器人显示光斑被 感测的位置的另一个示例。 图42是根据另一实施例的清扫机器人系统的立体图。 图43是根据另一实施例的清扫机器人的模块图。 图44是根据另一实施例的清扫机器人的上部立体图。 图45是根据另一实施例的清扫机器人的下部立体图。 图46是根据另一实施例的远程控制器的模块图。 图47是根据另一实施例的远程控制器的立体图。 8 CN 111568317 A 说 明 书 6/61 页 图48a和图48b示出根据另一实施例的远程控制器中包含的光发送部。 图49是示出根据另一实施例的远程控制器通过光发送部指示指定区域的概念图。 图50示出根据另一实施例的计算距远程控制器的距离的概念图。 图51示出根据一实施例而计算距远程控制器的距离的方法的流程图。 图52是图51中示出的方法的图形。 图53示出根据另一实施例而计算距远程控制器的距离的方法的流程图。 图54是图53中示出的方法的概念图。 图55是图53中示出的方法中的针对相异的多个红外线信号的图形。 图56a、图56b、图57a和图57b是示出根据另一实施例而计算距远程控制器的距离 的方法的概念图。 图58是示出根据又一实施例而计算远程控制器的方向的方法的流程图。 图59和图60是图58中示出的方法的概念图。 图61是示出根据又一实施例而计算远程控制器的方向的方法的流程图。 图62和图63是图61中示出的方法的概念图。 图64是判断用户的方向的方法的流程图。 图65和图66a至图66c是图64中示出的方法的概念图。 图67是示出根据又一实施例而设定指定结束区域的坐标的方法的流程图。 图68和图69是图67中示出的方法的概念图。 图70是示出根据又一实施例的设定多个指定结束区域的坐标的方法的概念图。 图71示出根据又一实施例的远程控制器的控制构成。 图72示出根据又一实施例的远程控制器的外观。 图73分解示出根据又一实施例的远程控制器。 图74a和图74b示出根据又一实施例的远程控制器中包含的透镜模块。 图75示出图72中示出的A-A’的剖面。 图76a、图76b、图77a和图77b是示出根据又一实施例的远程控制器中的光的行进 路径。











