
技术摘要:
本发明公开了变电站巡检机器人动态无线充电系统和方法。本发明包括变电站交流电源、整流装置、高频逆变装置、发送端谐振补偿装置、发送端线圈、位置传感器、控制器、接收端线圈、接收端谐振补偿装置、整流模块和巡检机器人电池,所述机器人电能接收模块通过接收高频正 全部
背景技术:
在电力系统中,变电站巡检的目的是通过对变电站设备的检查来掌握一次设备的 实际运行状况,以便及时发现设备的缺陷,消除安全隐患。而传统的变电站巡检是通过变电 站值班员实现,巡检效果受到巡检人员的技术水平、经验、外部实际环境等影响,并存在着 巡检过程中遗漏的可能性,同时巡检效率也不够高。 目前,变电站巡检机器人得到了越来越广泛的应用,其很好的弥补了变电站值班 员巡检的可靠性差、效率低等弊端。变电站巡检机器人多采用接触式充电,通过让机器人按 照特定轨迹返回充电室,并将充电插头插入充电插座来完成自主充电。同时,频繁的插拔充 电,易造成插头的磨损,进而导致接触不良,使其充电可靠性降低。同时,机器人的电池电量 较小,续航能力只有几小时,在正常的巡检工作中,容易出现电量耗尽的情况,只能提前返 回充电室充电,导致巡检工作中断,待充电重新完成后,才继续进行巡检工作,造成了大量 的时间浪费。 无线电能传输技术将电能以非接触的形式由电源传输到用电设备的新型电能供 给模式,具有安全可靠、灵活性好的优点。现有的巡检机器人无线充电系统存在以下问题: 无法实现边充电边巡检,只能到达静态充电的效果;对于采用集中供电导轨模式的巡检机 器人,在发送端全线供电时,导轨损耗严重,同时系统可靠性较差。因此,亟需提出针对巡检 机器人的无线充电技术解决上述问题。
技术实现要素:
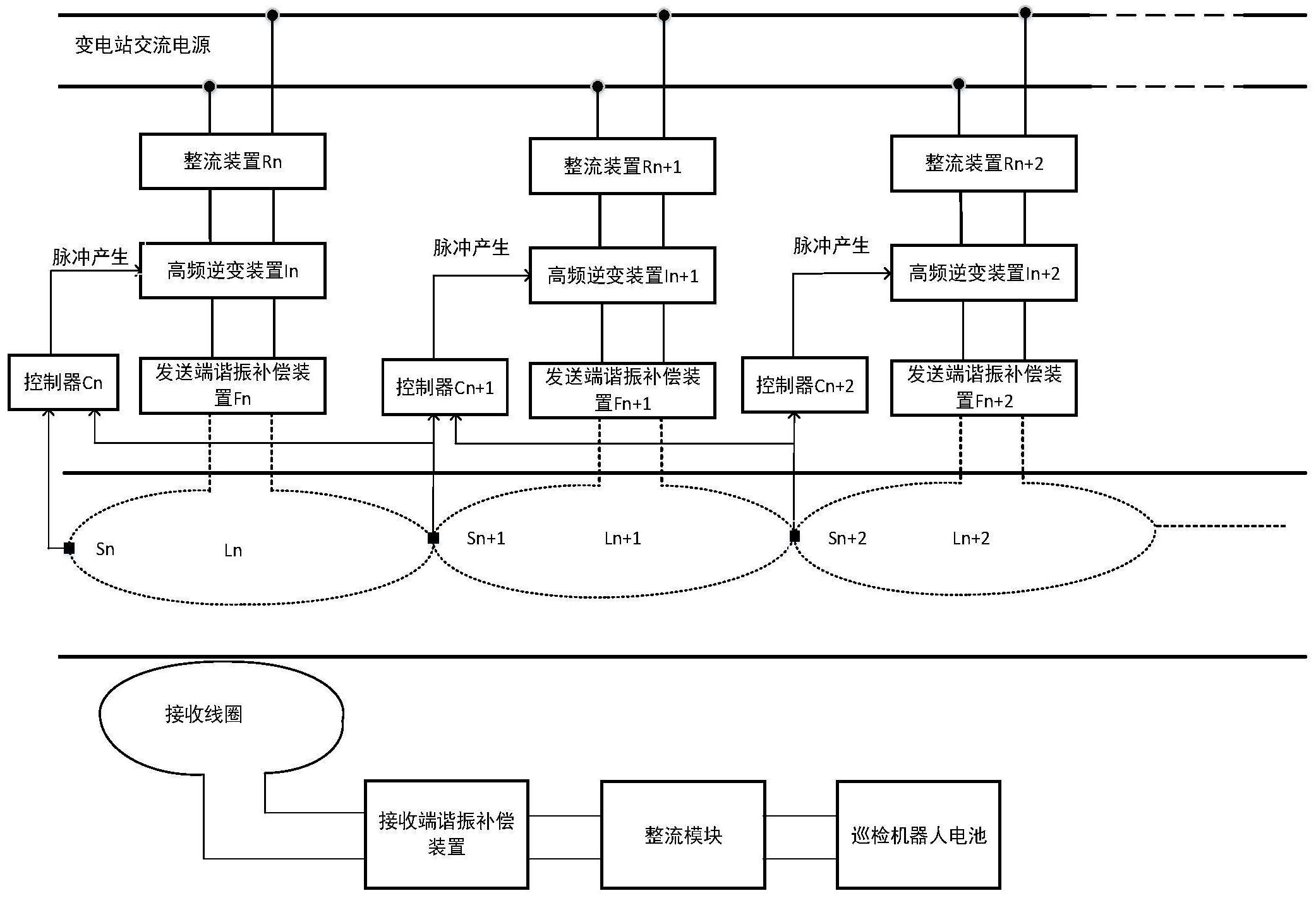
本发明的目的提出变电站巡检机器人动态无线充电系统和方法,本发明解决了巡 检机器人法实现边充电边巡检,只能到达静态充电的效果,对于采用集中供电导轨模式的 巡检机器人,在发送端全线供电时,导轨损耗严重,同时系统可靠性较差的问题。 本发明公开变电站巡检机器人动态无线充电系统和方法,系统包括设置于变电站 中的电源发送端和设置于巡检机器人中的机器人电能接收模块,所述电源发送端包括变电 站交流电源、整流装置、高频逆变装置、发送端谐振补偿装置、发送端线圈、位置传感器、控 制器,所述机器人电能接收模块包括接收端线圈、接收端谐振补偿装置、整流模块、巡检机 器人电池。所述电源发送端的变电站交流电源输出端连接整流装置的输入端,整流装置的 输出端连接高频逆变装置的输入端,高频逆变装置的输出端通过谐振补偿装置连接发送端 线圈输入端,发送端线圈上的位置传感器连接控制器输入端,控制器输出端通过脉冲产生 器控制高频逆变装置的通断。所述机器人电能接收模块的接收端线圈通过接收端谐振补偿 装置连接到整流装置的输入端,整流装置的输出端连接到巡检机器人电池的电能输入端, 巡检机器人电池的电能输出端连接到机器人的控制模块的供电接口。所述的发送端线圈与 4 CN 111600399 A 说 明 书 2/5 页 接收端线圈之间为感应耦合电能传输。 进一步地,变电站巡检机器人动态无线充电系统,所述机器人电能接收模块通过 接收高频正弦波电源信号为机器人充电,通过多个位于变电站中的电源发送端变换工频交 流电源获得所述高频正弦波电源信号。 进一步地,所述发送端谐振补偿装置与所述发送端线圈构成SP拓扑,所述接收端 谐振补偿装置与所述接收端线圈构成S拓扑,因此系统整体为SPS型复合拓扑。 进一步地,所述电源发送端还包括变电站交流电源、整流装置和高频逆变装置,所 述机器人电能接收模块还包括巡检机器人电池和整流模块; 所述变电站交流电源用于输出工频交流电源至所述整流装置; 所述整流装置用于将所述工频交流电源转换为直流电源信号并输出至所述高频 逆变装置; 所述高频逆变装置用于将所述直流电源信号转换为高频的正弦波电源信号; 所述发送端谐振补偿装置用于接收所述高频逆变装置发送的高频的正弦波电源 信号并进行谐振补偿后输出至发送端线圈发射; 所述接收端线圈用于通过感应耦合的形式接收所述发送端线圈发射的高频的正 弦波电源信号并输出至所述接收端谐振补偿装置进行谐振补偿; 所述整流模块用于将所述机器人电能接收模块谐振补偿后的高频的正弦波电源 信号转换为直流电能信号后储存至所述巡检机器人电池。 进一步地,变电站内设置有多个所述电源发送端,多个所述电源发送端均与所述 机器人电能接收模块进行无线电能传输,多个所述电源发送端通过各自对应的控制器进行 控制无线输电的开关。其中,巡检机器人行进方向的多个所述电源发送端为所述机器人电 能接收模块依次连续供电,多个所述控制器依据位置传感器检测到的巡检机器人位置变化 判断巡检机器人的行进方向并在巡检机器人进入对应电源发送端的发送端线圈磁场范围 时控制同行进方向的多个对应电源发送端的开关。 优选的,所述位置传感器设置于两个发送端线圈的重心连线的中点上,两个所述 发送端线圈分别对应两个相邻的电源发送端,每个发送端线圈对应的位置传感器均设置于 所述发送端线圈的同一侧。 优选的,两个所述位置传感器设置于两个相邻的发送端线圈的重心连线上,且两 个所述位置传感器距离重心连点的中点相同。 进一步地,所述发送端线圈与接收端线圈均为平面螺旋线圈。 变电站巡检机器人动态无线充电方法,包括以下步骤: 步骤1:变电站交流电源向整流装置输送工频交流电源; 步骤2:整流装置将工频交流电源转换为直流电源信号,并将直流电源输送给高频 逆变装置In; 步骤3:高频逆变装置将直流电源信号转换为高频的正弦波电源信号; 步骤4:所述的高频逆变装置输出的正弦波电源信号在通过发送端谐振补偿装置 的谐振补偿后,由发送端线圈发射高频的正弦波电源信号,接收端线圈采用感应耦合的形 式接收高频的正弦波电源信号; 步骤5:接收端线圈接收的高频正弦波电源信号通过接收端谐振补偿装置连接到 5 CN 111600399 A 说 明 书 3/5 页 整流模块,整流模块将高频正弦波电源信号转换为直流电能信号连接到巡检机器人电池的 电能输入端,从而为巡检机器人提供电能。 进一步地,当巡检机器人开始巡检,进入到发送端线圈时,位置传感器随即检测到 巡检机器人的位置,将信号传输给控制器,控制器通过脉冲产生将高频逆变装置启动,此时 开始对巡检机器人进行无线充电; 具体步骤如下: 当巡检机器人即将离开发送端线圈Ln,进入到下一个发送端线圈Ln 1范围内时, 位置传感器Sn 1随即检测到巡检机器人的位置,将信号传输给控制器Cn 1与控制器Cn,控 制器Cn 1通过脉冲产生将高频逆变装置In 1启动,控制器Cn通过脉冲产生将高频逆变装置 In关闭,保持对巡检机器人的动态无线充电; 当巡检机器人即将离开发送端线圈Ln 1,进入到发送端线圈Ln 2时,位置传感器 Sn 2随即检测到巡检机器人的位置,将信号传输给控制器Cn 2与控制器Cn 1,控制器Cn 2 通过脉冲产生将高频逆变装置In 2启动,控制器Cn 1通过脉冲产生将高频逆变装置In 1关 闭,保持对巡检机器人的动态无线充电; 直到巡检机器人完成巡检工作,保证了巡检机器人在工作中保持动态的无线充 电; 其中,发送端线圈Ln、位置传感器Sn、控制器Cn和高频逆变装置In互相对应属于同 一电源发送端N,发送端线圈Ln 1、位置传感器Sn 1、控制器Cn 1和高频逆变装置In 1互相 对应属于同一电源发送端N 1,发送端线圈Ln 2、位置传感器Sn 2、控制器Cn 2和高频逆变 装置In 2互相对应属于同一电源发送端N 2。 本发明具有如下的优点和有益效果: 本发明解决了巡检机器人只能静态无线充电的问题,实现了巡检机器人在巡检时 动态无线充电的目的; 本发明采用分段供电的动态无线充电系统,解决了发送端全线供电时,导轨损耗 严重,系统可靠性较差的问题; 本发明发送端线圈与接收端线圈均为平面螺旋线圈,具有占用空间小的特点,易 于安装在巡检机器人的底盘空间较小的充电装置中; 本发明采用SPS型复合拓扑,具有更好的抗偏移能力,更适用于动态的感应耦合电 能传输系统。 附图说明 此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部 分,并不构成对本发明实施例的限定。在附图中: 图1为本发明的结构示意图。 图2为本发明的实施结构一位置传感器设置示意图。 图3为本发明的实施结构二位置传感器设置示意图。











