
技术摘要:
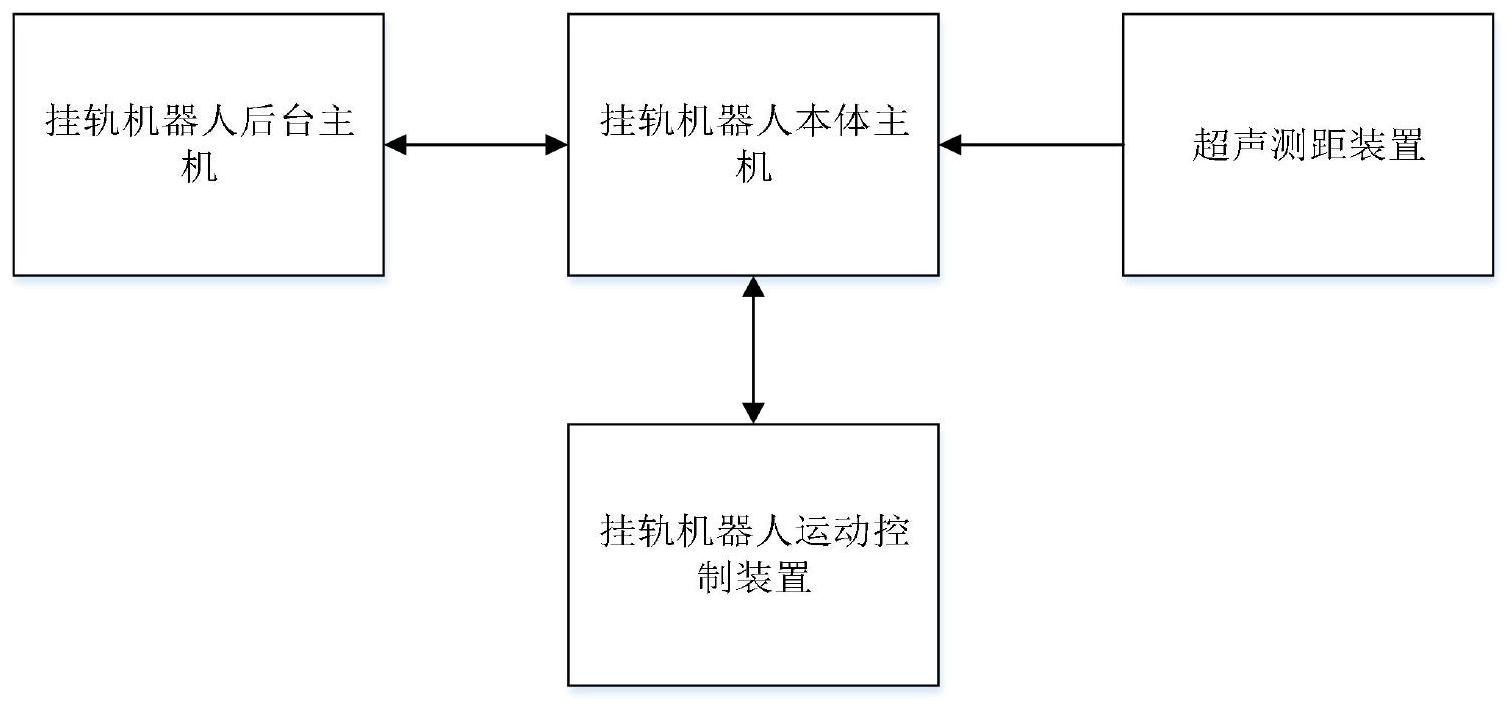
本发明公开了一种变电站挂轨机器人防碰撞系统及方法,所述系统包括:挂轨机器人后台主机、挂轨机器人本体主机、超声测距装置、挂轨机器人运动控制装置,所述挂轨机器人后台主机与挂轨机器人本体主机通信连接,所述超声测距装置的输出端连接至所述挂轨机器人本体主机的 全部
背景技术:
变电站继保室、高压室、GIS室等室内场所设备众多,为提高巡视工作效率和节省 空间,需要使用挂轨机器人开展设备巡视业务。变电站设备众多,随着设备检修、改造工作 的增多,挂轨机器人巡检环境也愈加复杂。挂轨机器人在巡检过程中会碰撞到人员、设备或 其他物体,从而有可能对人员、设备、挂轨机器人造成损害,因此巡检机器人的防碰撞方法 是至关重要的。 现有机器人防碰撞方法大多是通过机器人上的紧急停止按钮或机器人碰撞物体 后触发微动开关断电迫使机器人停止运动。通过急停按钮停止机器人需要人工发现危险并 手动停止机器人,在人工未发现危险情况下,机器人会发生碰撞造成设备损害;通过机器人 碰撞物体后触发微动开关的防碰撞方法在挂轨机器人上适用性较差,无法全方位保护机器 人且机器人碰撞变电站设备存在一定风险。 在现有技术中,公开号为CN109049006A的发明专利,公开了一种扫地机器人的防 碰撞检测方法,包括以下步骤,S1:预备具有MEMS器件(加速度计、陀螺仪)的扫地机器人,当 扫地机器人处于直线运动状态,并发生碰撞情况时,跳转至步骤S2;当扫地机器人处于颠簸 不平路面状况时,跳转至步骤S3;当扫地机器人处于旋转运动状态,且有障碍物阻挡时,跳 转至步骤S4;S2:利用牛顿第二定律V=a×t;扫地机器人启动行走时是正向加速度,撞击物 体时为负加速度,匀速运动加速度为0;当碰撞发生时,采用陀螺仪修正扫地机器人水平加 速度数值,该技术方案是通过MEMS器件进行障碍物的碰撞检测后然后再进行调整,无法进 行碰撞预警。公开号为:CN104850699B,公开了一种冲压线搬运机器人防碰撞控制方法,包 括如下步骤:步骤101、基于AABB包围盒法建立机器人关节轴包络模型和锻压机简化包络模 型;步骤102、将上述机器人关节轴包络模型和锻压机简化包络模型分别向三个坐标面平面 进行投影;步骤103、判定机器人是否发生碰撞,具体为:如果任意一个投影不存在重叠区 域,则判定机器人不发生碰撞;如果有一个投影存在重叠区域,则表示可能有碰撞,随后结 合其余两个投影面进一步判断。该技术方案利用预设模型通过投影重叠区域先判断碰撞, 无法进行全方位的预警和避障动作。 因此,迫切需要一种全方位保护、智能避障的挂轨机器人防碰撞方法。
技术实现要素:
本发明为克服上述现有技术中的机器人防碰撞无法有效的提前预警和避障的缺 陷,提供一种变电站挂轨机器人防碰撞系统及方法。 本发明的首要目的是为解决上述技术问题,本发明的技术方案如下: 本发明第一方面提供了一种变电站挂轨机器人防碰撞系统,包括:挂轨机器人后 4 CN 111590590 A 说 明 书 2/5 页 台主机、挂轨机器人本体主机、超声测距装置、挂轨机器人运动控制装置,所述挂轨机器人 后台主机与挂轨机器人本体主机通信连接,所述超声测距装置的输出端连接至所述挂轨机 器人本体主机的输入端,所述挂轨机器人运动控制装置与挂轨机器人本体主机电连接。 本方案中,所述挂轨机器人后台主机用于编辑和发布巡检任务,同时建立挂轨机 器人所在设备室的轨道模型和巡检目标分布模型。 本方案中,所述超声测距装置包括有5个,分别设置在挂轨机器人的前侧、后侧、左 侧、右侧、底侧五个不同部位,所述前侧、后侧、左侧、右侧、底侧分别对应五个方向:挂轨检 机器人的前方、后方、左方、右方、下方。 本方案中,每个超声测距装置均包括有一个超声波接收器和一个超声波发射器。 本发明第二方面提供了一种变电站挂轨机器人防碰撞方法,包括以下步骤: S1:超声测距装置按照预设的方向进行实时探测,若挂轨机器人的前、后、左、右方 任一方向的超声测距装置测得的所在方向上障碍物距离大于所在方向的第一障碍告警值, 则挂轨机器人按照设定的速度继续匀速行驶; S2:当前、后、左、右任一方向的超声测距装置测得的障碍物的距离小于第一障碍 告警值,则挂轨机器人本体主机发出一级障碍告警信号,挂轨机器人按照设定的速度减速 行驶; S3:当前、后、左、右任一方向的超声测距装置测得的障碍物的距离小于第二障碍 告警值则挂轨机器人本体主机发出二级障碍告警信号,挂轨机器人停止行驶; S4:挂轨机器人本体主机发出障碍告警信号,同时声光报警提醒工作人员,挂轨机 器人本体主机将障碍告警信号发送至挂轨机器人后台主机,挂轨机器人后台主机会显示障 碍告警信号报文并发出声光报警,同时发送短信通知运行人员; S5:每个方向的超声测距装置实时检测挂轨机器人与对应各方向邻近障碍物距离 并把障碍物测距结果传送挂轨机器人本体主机,挂轨机器人本体主机把障碍物测距结果上 送到挂轨机器人后台主机; S6:挂轨机器人本体主机发出二级障碍告警信号后,若二级障碍告警信号存续时 间小于设定的时间t,其中t为正整数,则挂轨机器人在二级障碍告警信号消失后继续当前 任务;若二级障碍告警信号存续时间大于设定的时间t,挂轨机器人后台主机智能规划路线 避开障碍物,继续当前剩余任务,挂轨机器人后台主机智能规划路线无法避开障碍物则挂 轨机器人取消任务原地待命。 本方案中,所述方法还包括伸缩调节防碰撞步骤,具体为: 当挂轨机器人的下方超声测距装置测得的障碍物距离大于下方的第三障碍告警 值,挂轨机器人伸缩节正常运行; 当挂轨机器人的下方超声测距装置测得的障碍物距离小于下方的第三障碍告警 值,挂轨机器人本体主机发出伸缩节障碍告警信号,挂轨机器人伸缩节停止运行; 挂轨机器人本体主机发出伸缩节障碍告警信号的同时会声光报警提醒周围人员; 挂轨机器人本体主机将伸缩节障碍告警信号上送到挂轨机器人后台主机,挂轨机器人后台 主机显示伸缩节障碍告警信号报文并发出声光报警,同时发送短信通知运行人员; 超声测距装置实时检测挂轨机器人下方向障碍物距离并把障碍物测距结果传送 挂轨机器人本体主机,挂轨机器人本体主机把障碍物测距结果上送到挂轨机器人后台主 5 CN 111590590 A 说 明 书 3/5 页 机。 本方案中,挂轨机器人后台主机实时接收挂轨机器人各个方向与邻近障碍物距 离,并在预设的轨道及设备模型地图中显示障碍物位置及距离;挂轨机器人后台主机收到 告警信号后,显示告警信号及每个超声测距装置所测得障碍物距离。 本方案中,当挂轨机器人后台主机死机或挂轨机器人后台程序通信异常时,挂轨 机器人后台主机与挂轨机器人本体主机通信中断,挂轨机器人本体主机将暂停巡检工作, 待通信重新连接后,挂轨机器人将测得的障碍物距离距信息传输到挂轨机器人后台主机才 继续执行未完成的巡检任务。 本方案中,运营人员能够在挂轨机器人后台主机自主设置每个方向的第一告警距 离阈值和第二告警阈值,即前方、后方、左方、右方、下方的第一告警距离阈值和第二告警阈 值,在不同轨道区域,同一方向上的第一告警阈值能够设置为不同值。 本方案中,当人工清除障碍物后,挂轨机器人后台主机发布继续执行未完成任务 命令。 与现有技术相比,本发明技术方案的有益效果是: 本发明利用不同方位设置的超声测距装置,通过预设的分级的告警阈值防碰撞策 略,能够有效的实现挂轨机器人的提前碰撞预警和避障。 附图说明 图1为本发明系统示意图。 图2为本发明一种变电站挂轨机器人防碰撞方法流程图。 图3为本发明中挂轨机器人伸缩防节碰撞流程图。











