
技术摘要:
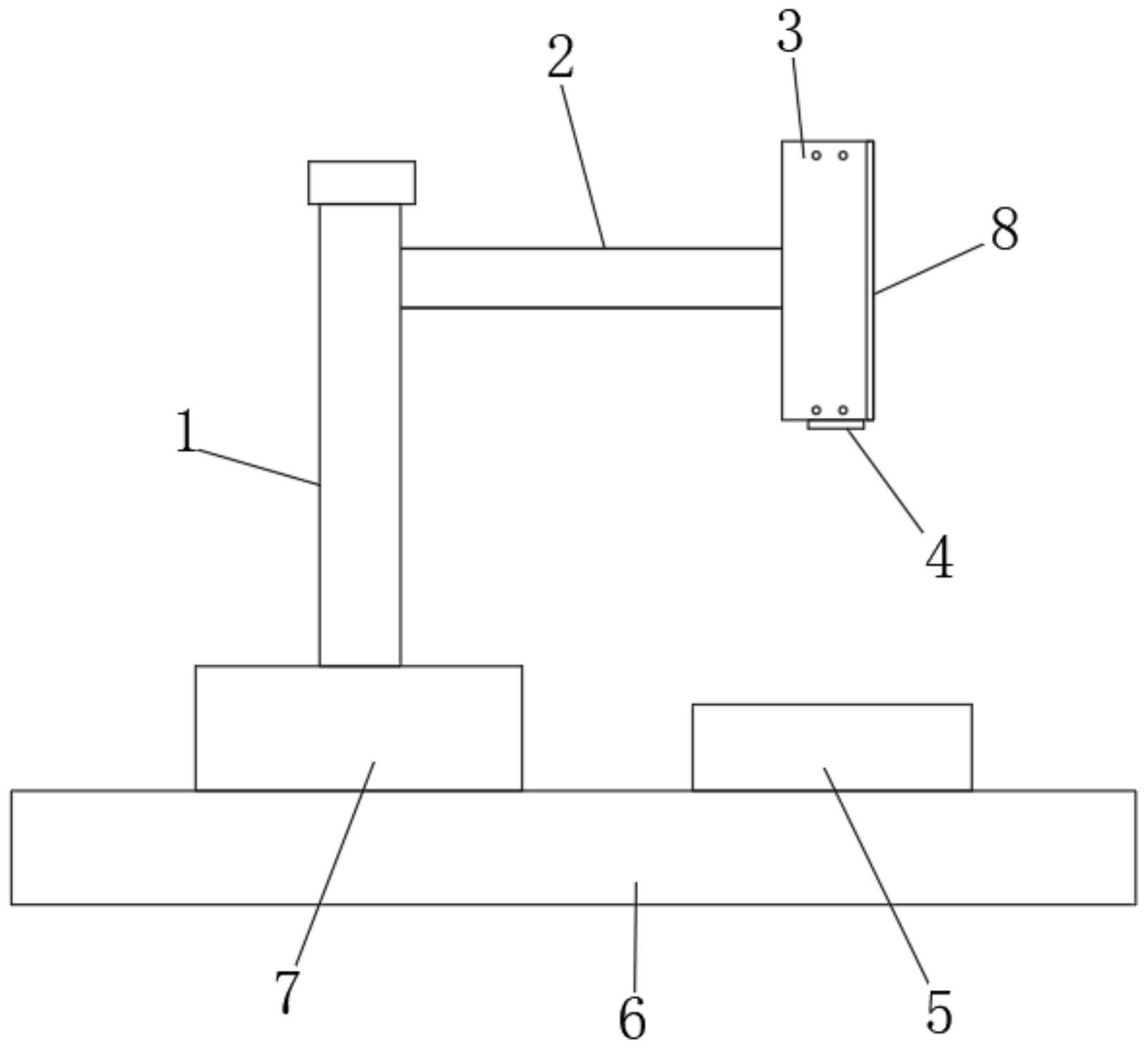
本发明公开了一种用于工业机器人的货物抓取装置,本发明涉及工业机器人技术领域,包括第二滑动平台,所述第二滑动平台的底部安装有底座,所述第二滑动平台的一侧安装有货物放置平台,且第二滑动平台的顶部安装有第一滑动平台,所述第一滑动平台的一侧安装有机械臂,且 全部
背景技术:
工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一 定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,工业机器人 主要的为驱动机构和执行机构,执行机构主要用于抓取货物,抓取货物的装置在不同的场 合下各有不同,现有的货物抓取装置在使用时,仍存在不足之处,货物抓取装置每次抓取货 物后直接需将货物放在另一个目的地,工业机器人的机械臂需要反复操作,机械臂驱动元 件损耗较大,抓取货物量少,且货物抓取装置上无法累加货物,货物运输效率低。
技术实现要素:
本发明的目的在于提供一种用于工业机器人的货物抓取装置及抓取方法,以解决 上述











