
技术摘要:
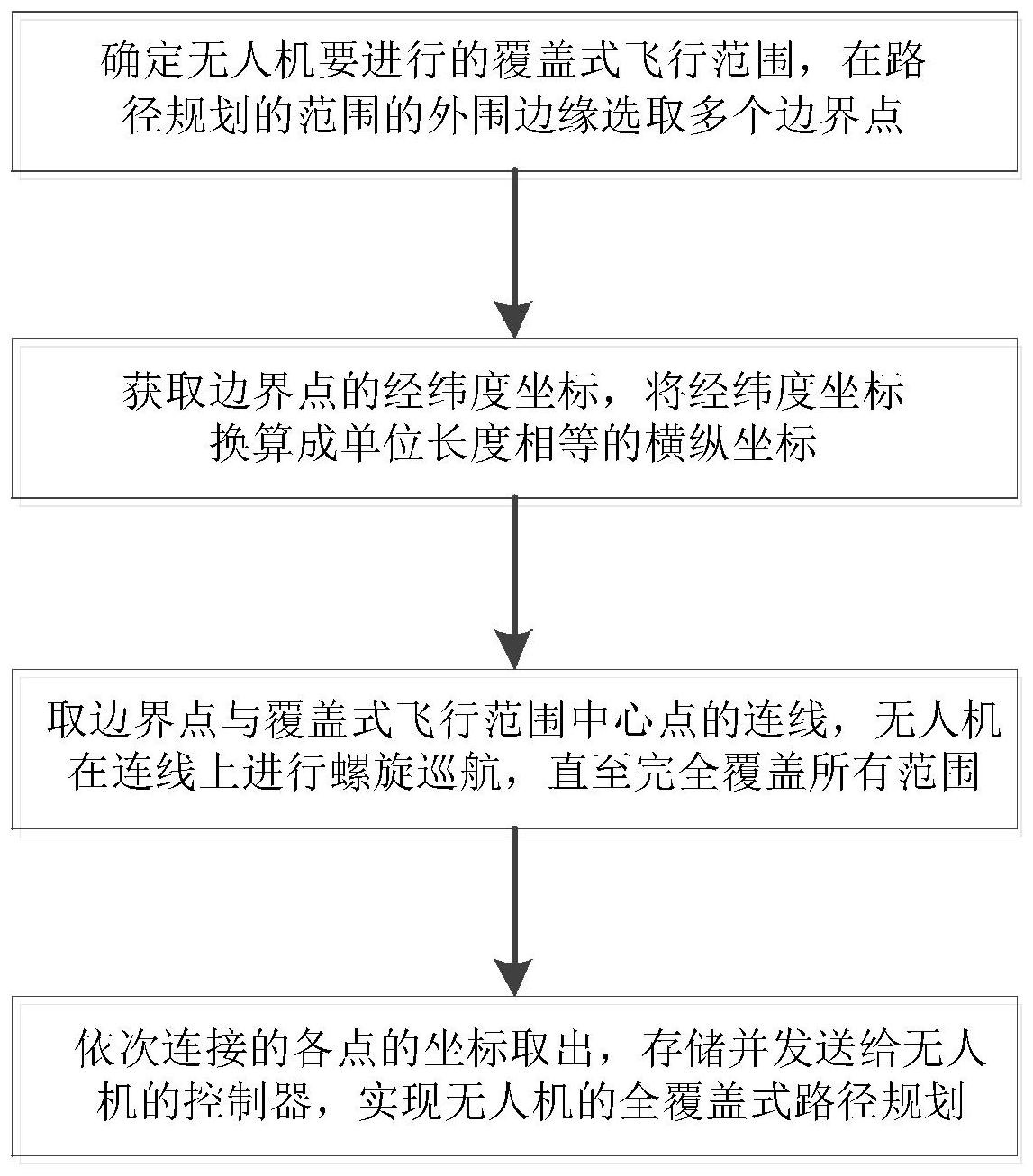
本发明实施例公开了一种无人机全覆盖式路径规划方法,所述方法为:确定无人机要进行的覆盖式飞行范围,在路径规划的范围的外围边缘选取多个边界点;获取边界点的经纬度坐标,将经纬度坐标换算成单位长度相等的横纵坐标;取边界点与覆盖式飞行范围中心点的连线,无人机 全部
背景技术:
在很多场景中需要无人机在某个固定范围内进行全覆盖式巡航,即飞行轨迹可以 填充满整片区域。例如:用无人机对某一范围内的农作物进行全范围喷药,将全部地区喷洒 后才算完成工作。 目前全覆盖式路径规划的方法主要为两种,一是手动规划路线,缺点为对于较大 范围的地区,当线路密集时,手动规划过于繁琐且存在较大误差;二是在无人机行走过程中 自行规划路线,缺点为有较大的不确定性,无法准确预知无人机的行走路线。
技术实现要素:
为此,本发明实施例提供一种无人机全覆盖式路径规划方法,以解决现有无人机 全覆盖路径规划复杂、误差大、精度低的问题。 为了实现上述目的,本发明实施例提供如下技术方案: 本发明实施例公开了一种无人机全覆盖式路径规划方法,所述方法为: 确定无人机要进行的覆盖式飞行范围,在路径规划的范围的外围边缘选取多个边 界点; 获取边界点的经纬度坐标,将经纬度坐标换算成单位长度相等的横纵坐标; 取边界点与覆盖式飞行范围中心点的连线,无人机在连线上进行螺旋巡航,直至 完全覆盖所有范围; 或通过相邻两个边界点进行连线,求出所选范围横向移动长度,在横向移动长度 上取等分点与边界点连线得到交点,连接交点进行蛇形巡航,直至覆盖所有范围; 将依次连接的各点的坐标取出,存储并发送给无人机的控制器,实现无人机的全 覆盖式路径规划。 进一步地,所述无人机要进行的覆盖式飞行范围的周长为s米,每隔x米距离选取 一个边界点,共选取i个点,通过定位系统获取i个点的经纬度坐标,(j1,w1)、(j2,w2)…… (ji,wi),然后将经纬度坐标转换为单位长度相等的横纵坐标,k∈(1~i), xk=jk×coswk、 yk=wk。 进一步地,所述边界点计算出覆盖式飞行范围中心点,中心点作为飞行路径的起 点,中心店的坐标为(xz,yz), 4 CN 111580549 A 说 明 书 2/5 页 进一步地,所述中心点与各个边界点进行连线,每条线的长度分别为R1、R2…… Ri, Rmax等于其中最长的连接线 的长度,按照所需要的路径填充密度,无人机经过时的覆盖范围为π×r2,设置螺旋巡航j 圈,其中: 进一步地,所述中心点与各个边界点连接的i条连接线进行j等分,取每一个等分 点作为路径点,x[k,q]和y[k,q]为路径点[k,q]的横纵坐标,k∈(1~i),q∈(1~j), 进一步地,所述路径点进行连接,从中心点开始,每走完一圈,就向外移动一格,然 后开始新的一圈:从中心点开始,先连接第一圈的点[1,1]、点[2,1]、…、点[i,1]、点[1,1], 第一圈完成后,再通过连接点[1,1]和点[1,2]开始第二圈的连接,点[1,2]、点[2,2]……点 [i,2]、点[1,2],然后再开始下一圈,以此类推,直到连接到最后一个点[i,j]为止,如需让 无人机在完成任务后返回起点,可在最后再连接中心点。 进一步地,所述通过相邻两个边界点进行连线,得出表达式,y=ai×x bi,连线中 xmin为x1~xi中最小的,xmax为x1~xi中最大的,得出所选范围的横向长度:d=xmax-xmin,按 照所需要的路径填充密度,设无人机经过时的覆盖范围为π×r2 ,设置蛇形巡航j个来回, 进一步地,所述横向长度d进行j等分,求出边界线与每个等分线的交点,将x=xmin q×2×r,其中q∈(1~j-1),q个方程中的每一个分别与I1~Ii这个i个方程连立,每一个x =xmin q×2×r与I1~Ii连立一遍后都,可以得到两个y值;若q为奇数,则将两个交点中y值 较大的交点设为m(2q-1),y值较小的点设为m(2q);若q为偶数,则将两个交点中y值较大的 点设为m(2q),y值较小的点设为m(2q-1),依次连接m(1)、m(2)、……、m(2j-2)。 进一步地,所述连接的各点的坐标取出,存储并发送给无人机的控制器,无人机控 制器控制无人机按照规划好的路径进行全覆盖式飞行。 本发明实施例具有如下优点: 本发明公开了一种无人机全覆盖式路径规划方法,通过在路径规划的范围的外围 边缘选取多个边界点,获取边界点的经纬度坐标,将经纬度坐标换算成单位长度相等的横 纵坐标,取边界点与覆盖式飞行范围中心点的连线,无人机在连线上进行螺旋巡航,直至完 全覆盖所有范围;或通过相邻两个边界点进行连线,求出所选范围横向移动长度,在横向移 动长度上取等分点与边界点连线得到交点,连接交点进行蛇形巡航,直至覆盖所有范围,实 现无人机全覆盖路径规划,操作简单,避免出现手动设置的误差,提升精度,保证所有区域 均被覆盖。 5 CN 111580549 A 说 明 书 3/5 页 附图说明 为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方 式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅 仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 提供的附图引伸获得其它的实施附图。 本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供 熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的 实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功 效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。 图1为本发明实施例1提供的一种无人机全覆盖式路径规划方法的流程图; 图2为本发明实施例1提供的一种无人机全覆盖式路径规划方法的飞行范围示意 图; 图3为本发明实施例1提供的一种无人机全覆盖式路径规划方法的中心点与边界 点连线示意图; 图4为本发明实施例1提供的一种无人机全覆盖式路径规划方法的中心点与边界 点连线上无人机覆盖范围示意图; 图5为本发明实施例1提供的一种无人机全覆盖式路径规划方法的整体连线示意 图; 图6为本发明实施例2提供的另一种无人机全覆盖式路径规划方法的流程图; 图7为本发明实施例2提供的另一种无人机全覆盖式路径规划方法的边界点连线 示意图; 图8为本发明实施例2提供的另一种无人机全覆盖式路径规划方法的无人机飞行 路径示意图。











