
技术摘要:
本发明通过公开了一种无人驾驶模式中直线行驶智能预警的控制方法,当前车辆基础行驶信息至少包括车辆的未来转向行径、车道行驶行径;接收来自其他车辆的侧方道路车辆数据,并基于侧方道路车辆数据确定是否发出车辆预警。本发明通过在对当前行驶车辆进行道路检测的同时 全部
背景技术:
无人驾驶汽车是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆 到达预定目标的智能汽车。 它是利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置 和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶。无人 驾驶汽车集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,是计算机科学、模 式识别和智能控制技术高度发展的产物,也是衡量一个国家科研实力和工业水平的一个重 要标志,在国防和国民经济领域具有广阔的应用前景。 然而,在实际的驾驶体验中,车辆往往在行驶在路口时,会由于障碍物的遮挡、信 号的干扰或者一些突发的情况而导致车辆与前方、侧方车辆的躲避不及时,从而使得无人 驾驶存在一定的风险,而目前没有一种能够妥善解决上述技术问题的技术方案,尤其是在T 字路口时,由于没有信号灯,且存在视野盲区、障碍物的遮挡,其直行的车辆与右侧方向准 备右转的车辆会驶入同一股道,而这样的车辆汇入会使得无人驾驶车辆没有用以躲避的反 应时间,从而存在极大的安全隐患。 而目前,并没有一种能够解决上述技术问题的技术方案,具体地,缺少一种无人驾 驶模式中直线行驶智能预警的控制方法及装置。
技术实现要素:
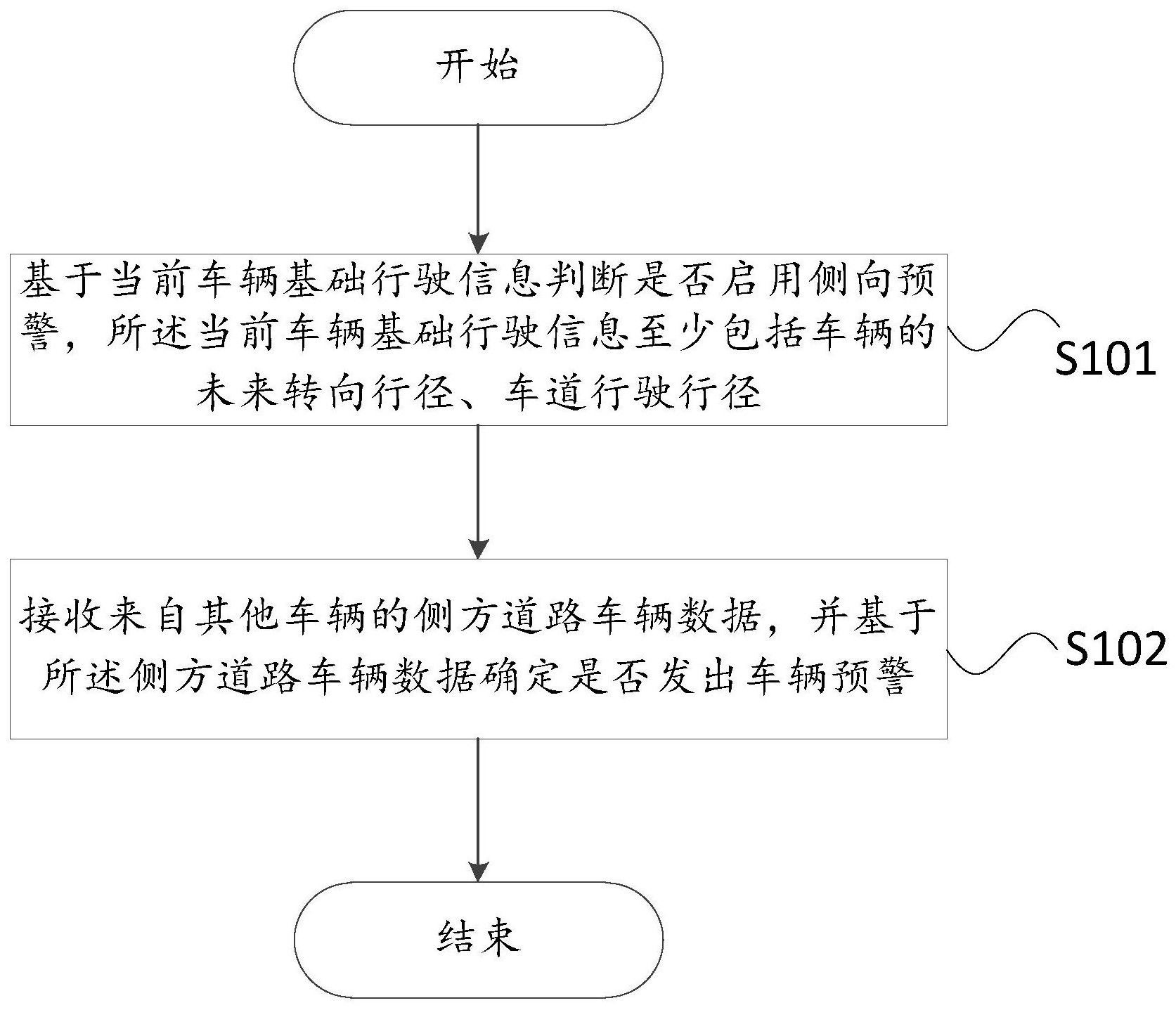
针对现有技术存在的技术缺陷,本发明的目的是提供一种无人驾驶模式中直线行 驶智能预警的控制方法及装置,根据本发明的一个方面,提供了一种无人驾驶模式中直线 行驶智能预警的控制方法,其对于路口直行的自动驾驶车辆进行检测并及时预警侧向车辆 或被侧向车辆预警,包括如下步骤: a.基于当前车辆基础行驶信息判断是否启用侧向预警,所述当前车辆基础行驶信 息至少包括车辆的未来转向行径、车道行驶行径; b.接收来自其他车辆的侧方道路车辆数据,并基于所述侧方道路车辆数据确定是 否发出车辆预警。 优选地,当所述路口为十字路口时,所述步骤a包括: a1:判断当前车辆的未来转向行径是左转、直行还是右转,当为左转时,不启用侧 向预警,当为直行或右转时,启用侧向预警; a2:判断当前车辆的车道行驶行径是否为最左侧车道,若是,则不启用侧向预警, 若不是,则启用侧向预警; a3:判断当前车辆距离右侧道路的距离是否大于第一阈值,若是,则不启用侧向预 5 CN 111583694 A 说 明 书 2/10 页 警,若不是,则启用侧向预警。 优选地,当所述路口为T字路口时,所述步骤a包括: a4:判断当前车辆的未来转向行径是直行还是右转,当为右转时,不启用侧向预 警,当为直行时,启用侧向预警; a5:判断当前车辆的车道行驶行径是否为最左侧车道,若是,则不启用侧向预警, 若不是,则启用侧向预警; a6:判断当前车辆距离右侧道路的距离是否大于第一阈值,若是,则不启用侧向预 警,若不是,则启用侧向预警。 优选地,所述步骤b包括如下步骤: b1:确定与当前车辆相对应的其他车辆的侧方道路车辆数据; b2:若所述侧方道路车辆数据显示无车辆,则不启用车辆预警,若所述侧方道路车 辆数据显示有车辆,则启用车辆预警。 优选地,在所述步骤b1中,通过如下方式确定侧方道路车辆数据: -基于道路检测装置; -基于当前车辆与其他车辆所共同使用的车载系统导航; -基于当前车辆与其他车辆所共同使用的第三方导航; -基于车辆后台服务器接收的数据。 优选地,在所述步骤a之前、之时或之后,基于道路检测装置确定当前车辆的车辆 数据并将所述当前车辆的车辆数据作为与其他车辆相对应的侧方道路车辆数据发送给其 他车辆。 优选地,所述道路检测装置确定车辆数据的方式通过如下步骤: i:获取检测时间段内两个单线激光雷达检测元的检测数据; ii:基于所述检测数据确定检测时间段内是否有车通过。 优选地,所述步骤i包括: i1:在道路右侧水平于车流方向间隔设置两个单线激光雷达检测元; i2:持续性的获取检测数据为{DAi,DBi},其中,所述DAi为沿车流方向上游位置的 单线激光雷达检测元的检测数据,所述DBi为沿车流方向下游位置的单线激光雷达检测元 的检测数据。 优选地,在所述步骤ii中,若在同一时刻,两个单线激光雷达检测元检测到有车辆 通过,则确定有车通过。 优选地,所述车辆预警至少包括减速、变道、振动、响铃。 根据本发明的另一个方面,提供了一种无人驾驶模式中直线行驶智能预警的控制 装置,其采用所述控制方法实现对于路口直行的自动驾驶车辆进行检测并及时预警侧向车 辆或被侧向车辆预警,包括车内系统、后台服务器以及道路检测装置,其中,所述道路检测 装置与所述车内系统产生通讯,所述后台服务器分别连接所述道路检测装置以及所述车内 系统。 优选地,所述车内系统至少包括: 第一判断装置:基于当前车辆基础行驶信息判断是否启用侧向预警; 第一处理装置:接收来自其他车辆的侧方道路车辆数据,并基于所述侧方道路车 6 CN 111583694 A 说 明 书 3/10 页 辆数据确定是否发出车辆预警。 优选地,所述第一判断装置包括: 第二判断装置:判断当前车辆的未来转向行径; 第三判断装置:判断当前车辆的车道行驶行径; 第四判断装置:判断当前车辆距离右侧道路的距离是否大于第一阈值。 优选地,所述第一处理装置包括: 第一确定装置:确定与当前车辆相对应的其他车辆的侧方道路车辆数据; 第二处理装置:若所述侧方道路车辆数据显示无车辆,则不启用车辆预警,若所述 侧方道路车辆数据显示有车辆,则启用车辆预警。 优选地,所述道路检测装置包括: 呈间隔设置的两个单线激光雷达检测元,其用于检测是否有车辆通过; 数据处理模块,其用于处理两个单线激光雷达检测元获得的检测数据,并确定车 辆数据; 数据发送模块,其用于将车辆数据发送至后台服务器或车内系统。 优选地,所述车内系统还包括: 数据接收模块:其用于接收来自道路检测装置的车辆数据; 信号处理模块:其用于处理来自道路检测装置的车辆数据; 车辆控制模块:其用于控制或者辅助控制当前车辆。 优选地,所述车内系统通过如下方式接收车辆数据: -DSRC信号模块;或者 -5G信号模块。 本发明通过公开了一种无人驾驶模式中直线行驶智能预警的控制方法,其对于路 口直行的自动驾驶车辆进行检测并及时预警侧向车辆或被侧向车辆预警,其基于当前车辆 基础行驶信息判断是否启用侧向预警,所述当前车辆基础行驶信息至少包括车辆的未来转 向行径、车道行驶行径;接收来自其他车辆的侧方道路车辆数据,并基于所述侧方道路车辆 数据确定是否发出车辆预警。本发明通过在对当前行驶车辆进行道路检测的同时,接收来 自侧方车辆的汇入预警,并将自身的道路检测结果作为其他车辆的侧方道路检测数据进行 传递,从而形成一个闭环的检测体系,尤其是在T字路口时,在对于设置有障碍物、识别不灵 敏、信号弱等等环境因素影响极大的路口条件时,能够自主的完成无人驾驶时的提前预警, 从而极大的降低安全隐患。本发明操作简单、使用方便、功能强大、能有效的降低安全隐患, 具有极高的商业价值。 附图说明 通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、 目的和优点将会变得更明显: 图1示出了本发明的











