
技术摘要:
本发明公开了一种预防交叉口堵车的方法,包括步骤如下:1)对交叉口群进行界定;2)利用排队论模型判断交叉口是否堵车;3)基于移动闭塞模型建立速度引导模型;4)根据上述速度引导模型得到当前车辆最佳行驶速度,并将其回传至当前车辆的车载终端。本发明的方法解决了 全部
背景技术:
近年来,随着汽车拥有量的是日渐增多,产生了大量由于交通拥堵导致的时间延 误、安全隐患和环境污染。交通运输部数据显示,交通拥堵产生的经济损失占全国生产力的 5%~8%。80%的城市的交通拥堵集中在十字路口和城市中心,大量城市需要一个快捷准 确的预防堵塞的解决方案。 随着网络技术的发展,与认为交通管理手段相比,速度引导在安全性和成本上都 有优越之处。以单个交叉口为对象进行车速引导,虽然车辆能不停车通过当前交叉口,但通 过交叉口后交通会呈现不均匀分布。当交通流到达下游交叉口时,就可能出现大规模拥堵; 从城市网角度来说,以交叉口群为拥堵治理对象更佳。 排队论发源于上世纪初,美国贝尔公司发明了自动电话,用来适应工商电话需要, 但是随之而来的是通话线路于电话用户呼叫的数量关系如何妥善解决,为了解决这个问 题,排队论应运而生。排队论讨论服务时间、服务效率、服务间隔、服务台个数等等。该方法 主要用于机场排队、地铁排队等一维模型,但是堵车情况严格来说是二维的,如环状堵车 等,但如果把堵车的疏通点视为服务台,则也可以把堵车问题作为排队问题来解决。 目前,车联网是各个公司都在奋力研究的领域,但是现在并未普及,就算普及也需 要大量的演算样本来提升性能。就目前而言,司机仍然是靠眼看耳听来控制车辆速度,观察 区域只限于前后方向两辆车,经常容易发生车祸和堵车,倘若车联网能解决堵车问题则会 极大有益于人类。
技术实现要素:
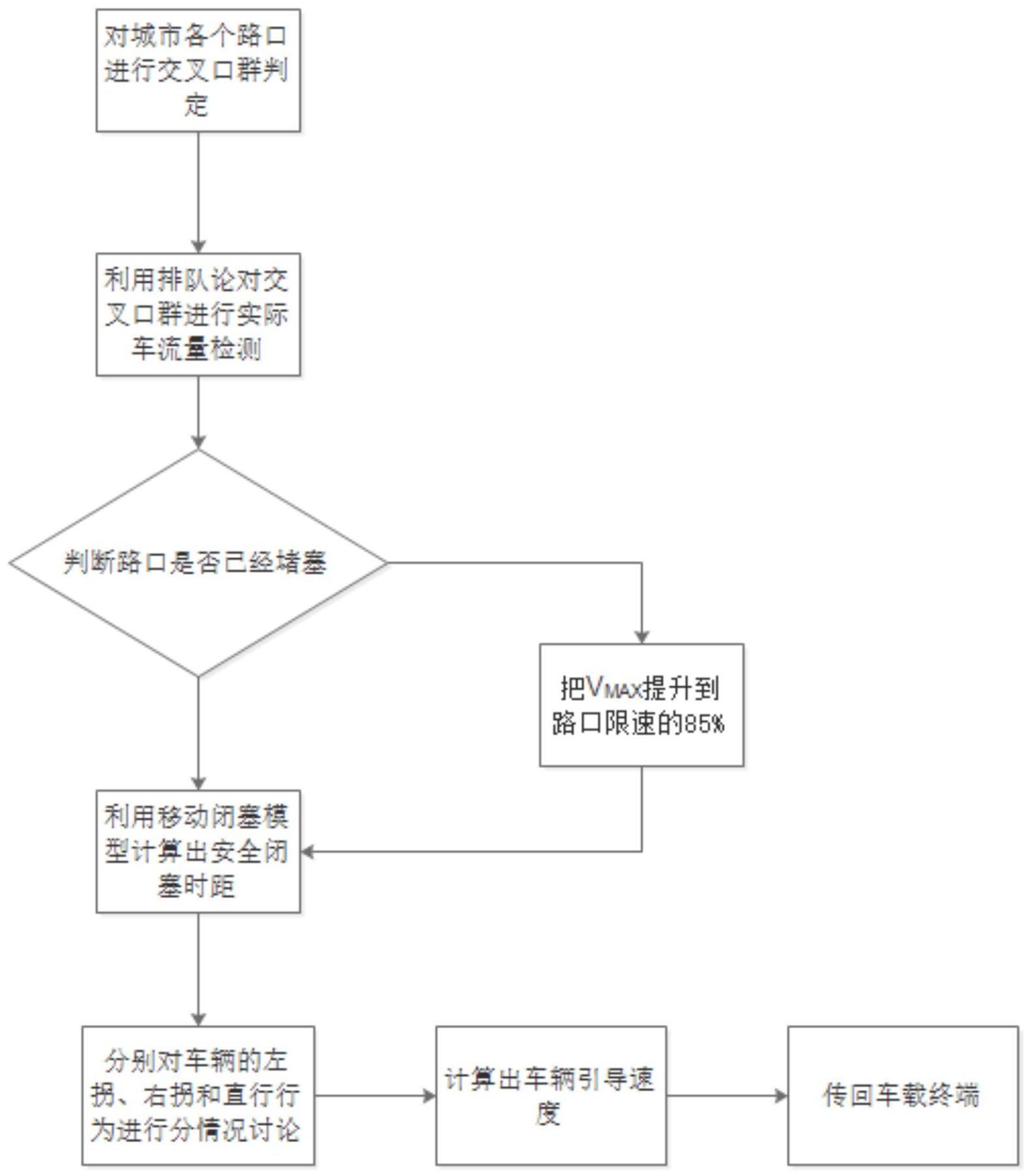
为了克服现有技术中存在的不足,本发明提供一种预防交叉口堵车的方法,以解 决现有技术中车联网技术的应用无法有效缓解拥堵路口堵车的问题。 为实现上述目的,本发明的一种预防交叉口堵车的方法,包括步骤如下: 1)对交叉口群进行界定; 2)利用排队论模型判断交叉口是否堵车; 3)基于移动闭塞模型建立速度引导模型; 4)根据上述速度引导模型得到当前车辆最佳行驶速度,并将其回传至当前车辆的 车载终端。 进一步地,所述步骤1)具体包括:采用间距法计算交叉口之间的关联度,筛选出内 部交叉口间距小的交叉口,即交叉口群,并将其是为一个整体进行协同控制。 进一步地,所述步骤1)中的交叉口群的判定因素包括:周围道路的复杂程度,其与 实际情况下的车流量无关,以此给出第一层筛选,筛选出有可能堵车的交叉口群;包含十字 4 CN 111583654 A 说 明 书 2/7 页 路口、T字路口和车流量较大的窄巷。 进一步地,所述步骤2)具体包括:利用排队论模型进行第二层筛选,对上述步骤1) 中界定出的交叉口群进行实际车流量监测,并用排队论模型进行计算,来筛选出堵车情况 严重或者存在堵车隐患的路口。 进一步地,所述步骤2)具体还包括:利用排队论模型来计算各个道路的平均等待 队长和平均等待时间,所述各道路的平均等待时间用以判断各道路是否有堵车事件的发 生;统计堵车等待时间的历史数据,对平均等待时间设置一个阈值,如果小于该阈值,则判 定为不堵车,运用速度引导模型来预防堵车;如果大于该阈值,则判定为堵车,对速度引导 模型进行优化,用优化后的速度引导模型来解决堵车问题。 进一步地,所述步骤3)具体包括:移动闭塞模型的核心求解参数是车辆之间的最 小追踪间隔LMB,其由驾驶员反映距离LREACTION、最大刹车距离LBRAKE和安全距离LSAFE构成;把 LMB转化为安全闭塞时距TMB,TMB由驾驶员反应时间TREACTION、车辆紧急刹车时间TBRAKE和安全 距离时间TSAFE组成,公式表示如下: 其中,VSUGGEST为车辆的引导速度,aMAX为车辆最大减速度。 进一步地,所述步骤3)具体还包括:针对车辆在十字路口右拐、直行和左拐的状况 下进行分类讨论,不同的行驶路线决定着安全距离的计算方法不同。 进一步地,所述步骤3)具体还包括:车辆通过交叉口经历三个过程,分别为:1)驾 驶员从接收信息到开始控速的时间TREACTION,在TREACTION内保持原速行驶;2)车辆调整至引导 速度Vguide-i;3)车辆保持Vguide-i通过交叉口; 车辆在1)阶段内的行驶距离: S1=V0i·t1=V0i·TREACTION (2) 车辆在2)阶段所用时间和行驶距离: 车辆在3)阶段节点所用时间和距离: 其中,Lrange-i是车辆从进入交叉口引导范围到交叉口停车线的距离,对于不同车 道的车辆分为以下计算方式,(x1,y1)是车辆进入交叉口范围时的坐标,(x2,y2)是交叉口停 车线中心点的坐标,Lleft是车辆左转的半径; 5 CN 111583654 A 说 明 书 3/7 页 车辆经过上述三个阶段后通过交叉口时刻等于上述移动闭塞模型计算时刻: Tpassfront-end TREACTION TBRAKE TSAFE Tadjust=Tarrive T1 T2 T3 (8) 把1)、2)和3)的计算结果带入式(8),得到: 化简可得车辆i的引导速度为: 其中,Tguide-i=Tpassfront-end Tsafe Tadjust-i-Tarrive-i。 本发明中,在车联网环境下,由路测单元采集周围环境信息、交通灯信息和周围车 辆信息,并将采集到的信息传送至控制中心,由控制中心进行计算,以安全性和效率为条 件,得到当前最佳行驶速度,传回车载终端。车联网环境下的速度引导模型和移动闭塞模型 均采用无线通信,通过速度引导模型计算出普通车辆引导速度,相比只获取列车信息,其还 能获取路测路标信息,红绿灯信息,周围360°方向的车辆信息,对于车辆定位技术、车辆感 知技术和无线通信技术的要求较高。当发生堵车时,采用排队论对堵车平均等待时间进行 计算,若超过阈值,则改进速度引导模型,对于被堵塞车辆,在确保安全性的基础上,升高引 导速度,对于后方车辆,适当减少引导速度,直至堵塞交叉口完全疏通为止。 本发明的有益效果: 本发明的方法解决了在路口处驾驶员对于速度判定失误的问题,有效防止因为行 驶速度带来的堵车问题。用计算机算出最佳行驶速度并将其传回车载终端,保证安全的同 时确保了效率,减少道路堵塞。 附图说明 图1为本发明方法的原理图。 图2a为网状交叉口群示意图。 图2b为线状交叉口群示意图。 图3为移动闭塞模型原理图。 图4为车联网环境下左转车辆情况示意图。 图5为交叉口群堵塞情况下改进速度引导模型示意图。 6 CN 111583654 A 说 明 书 4/7 页











