
技术摘要:
本发明涉及履带车电气控制系统技术领域,具体公开了一种履带车驱动总成电气控制系统,包括履带车驱动总成及控制系统。PLC控制器分别与驱动总成的电机、第一电磁离合器、第二电磁离合器、第三电磁离合器、第四电磁离合器及测速传感器连接,控制系统远程连接PLC控制器, 全部
背景技术:
小型轻载履带车占地小、对道路要求低、动力强等优点,因此小型轻载履带车一般 用于山地、农田、泥泞公路等地方的各种作业,现有的小型轻载履带车的驱动总成一般设于 车身下部的两个履带组成,而每个履带各通过一个电机进行驱动,但小型轻载履带车的两 个履带分别由一个电机驱动时,造成容易发动机功率消耗过大,增大了小型轻载履带车的 能耗。 进一步的,现有的两电机驱动履带的电气控制系统较复杂,且操控起来也较复杂。
技术实现要素:
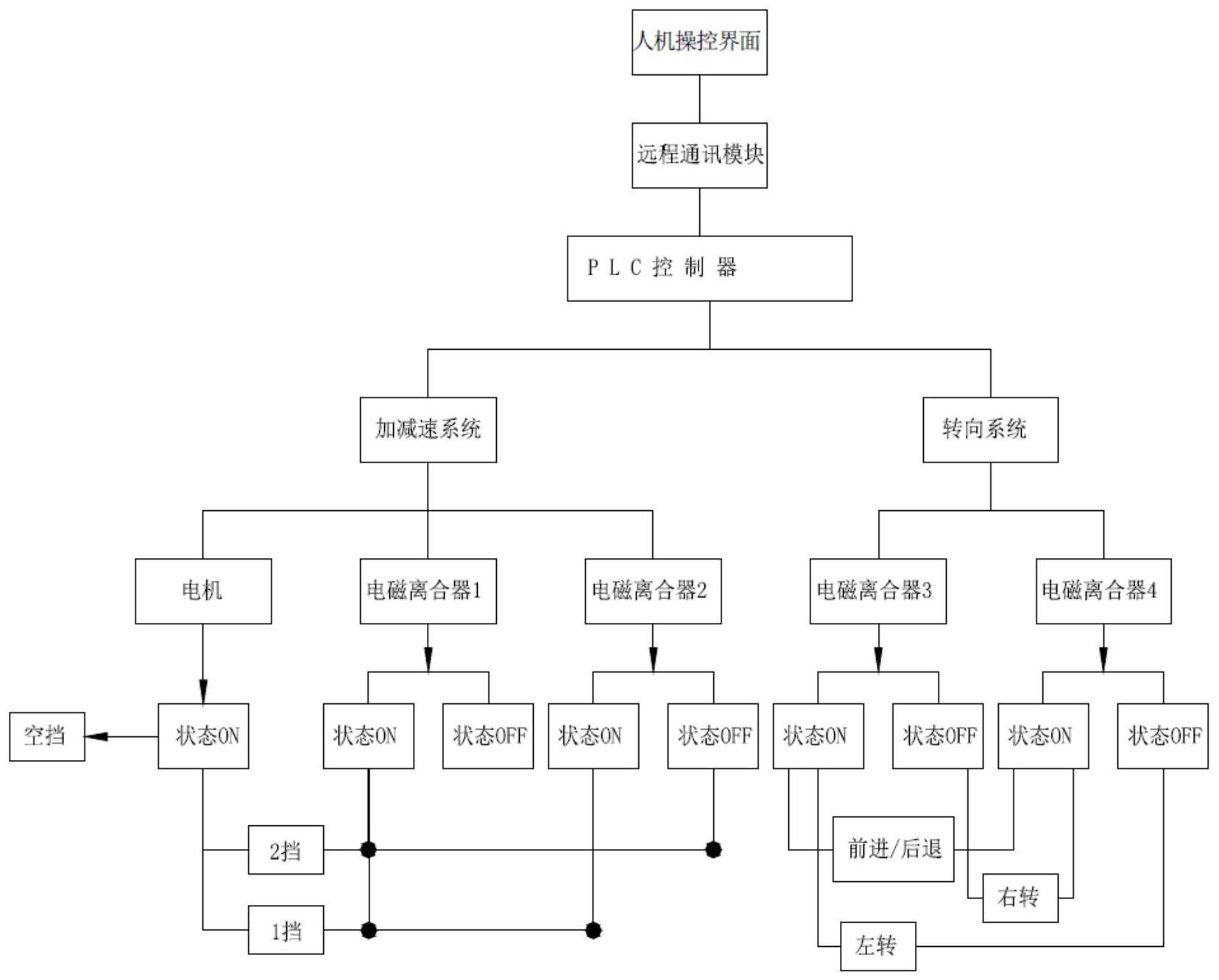
本发明的目的在于提供一种履带车驱动总成电气控制系统,其通过一个电机即可 驱动履带车,并匹配一套与其相适配的电气控制系统,使得不仅操作方便,且节省了能耗。 为实现上述目的,本发明提供了一种履带车驱动总成电气控制系统,包括:电机、 第一联轴器、第一电磁离合器、第一输出轴、第二联轴器、太阳能输入轴、第二电磁离合器、 第三联轴器、第一差速器、第三电磁离合器、齿圈、行星轮、太阳轮、变速箱行星架输出轴、主 传动轴、第四电磁离合器、第二输出轴、第二差速器、第四联轴器、测速传感器、PLC控制器及 控制系统; 所述电机通过第一联轴器与第一变速箱的变速箱输入轴的一端连接,所述变速箱 输入轴的另一端通过第一电磁离合器连接第二变速箱的第一输出轴的一端,所述第一输出 轴的另一端通过第二联轴器连接第三变速箱的太阳轮输入轴的一端,所述太阳轮输入轴的 另一端安装有太阳轮,变速箱行星架输出轴的一端设有三个行星轮,三个所述行星轮的轮 缘通过齿啮合于所述太阳轮的轮缘的齿上,所述齿圈的内齿啮合于三个行星轮的齿上,所 述太阳轮输入轴通过第二电磁离合器连接所述齿圈; 所述主传动轴的中部通过齿轮与所述变速箱行星架输出轴的另一端连接,所述主 传动轴的一端通过第三电离合器连接第一输出轴的一端连接,所述第一输出轴的另一端通 过第一差速器连接第三联轴器的输入端,第三联轴器的输出端连接履带车的第一履带主驱 动轮,所述主传动轴的另一端通过第四电离合器连接第二输出轴的一端连接,所述第二输 出轴的另一端通过第二差速器连接第四联轴器的输入端,第四联轴器的输出端连接履带车 的第二履带主驱动轮,所述第一履带主驱动轮和第二履带主驱动轮均设有一个测速传感 器; 所述PLC控制器分别与电机、第一电磁离合器、第二电磁离合器、第三电磁离合器、 第四电磁离合器及测速传感器连接,所述控制系统远程连接所述PLC控制器,所述控制系统 包括人机操控界面及设于人机操控界面上的启动模块、挂挡模块及方向控制模块;其中, 4 CN 111605390 A 说 明 书 2/5 页 所述启动模块用于启动/关闭所述电机; 所述挂挡模块用于当进行挂挡后通过所述PLC控制器控制所述第一电磁离合器和 第二电磁离合器闭合;同时获取两个所述测速传感器的均值,当均值大于一定阈值则控制 所述第二电磁离合器断开,当均值小于一定阈值则控制所述第二电磁离合器闭合;当进行 退挡后通过所述PLC控制器控制所述第一电磁离合器和第二电磁离合器断开; 所述方向控制模块用于当控制履带车前进/后退时控制所述第三电磁离合器和第 四电磁离合器闭合;当控制履带车左转时控制所述第三电磁离合器断开和第四电磁离合器 闭合;当控制履带车右转时控制所述第三电磁离合器闭合和第四电磁离合器断开。 优选的,上述技术方案中,还包括空挡控制模块、一挡控制模块及二挡控制模块; 所述空挡控制模块用于通过所述PLC控制器控制所述第一电磁离合器和第二电磁 离合器断开; 所述一挡控制模块用于通过所述PLC控制器控制所述第一电磁离合器和第二电磁 离合器闭合; 所述二挡控制模块用于通过所述PLC控制器控制所述第一电磁离合器闭合,第二 电磁离合器断开。 优选的,上述技术方案中,还包括接触器,所述PLC控制器连接接触器的线圈,所述 电机通过接触器的常开开关连接电源。 优选的,上述技术方案中,所述第一联轴器包括第一连接座、第一固定座、空心轴、 电吸盘、正负极滚子、实心轴、第二连接座及第二固定座; 所述空心轴与第一连接座固定连接,所述第一连接座固定于所述第一固定座上, 所述第一固定座与电吸盘的一侧固定连接,所述电吸盘的一侧设有接电槽,所述接电槽设 有正极接触触点和负极接触触点,所述正负极滚子以能够转动地设于所述接电槽内,所述 正负极滚子的正极环与所述正极接触触点活动连接,负极环与所述负极接触触点活动连 接;所述第二固定座活动连接于所述电吸盘的另一侧,所述第二连接座固定于所述第二固 定座上,所述实心轴固定于所述第二固定座上。 优选的,上述技术方案中,所述电吸盘的吸力为电机正常工作时扭矩的1.5倍。 优选的,上述技术方案中,所述第一连接座通过连接螺栓固定于所述第一固定座 上,所述第一固定座与电吸盘的一侧通过连接螺栓固定连接。 优选的,上述技术方案中,所述第二连接座通过张紧螺栓固定于所述第二固定座 上。 与现有的技术相比,本发明具有如下有益效果: 1 .本发明中的履带车驱动总成电气控制系统,设置一个电机同时配合离合器、差 速器等构件即可驱动两个履带,采用一个电机与两个电机相比,减少耗能的构件,并且使得 机身轻量化,从而能够减少履带车的能耗,进一步的,匹配了对应电气控制系统,该电气控 制系统通过人机界面进行操作即可,且操作简单。 2.本发明对第一联轴器做了改进,采用电吸盘的结构,即当负荷大于电吸盘规定 的吸力时,则自动断开,防止电机轴因过载产生断轴的风险。 5 CN 111605390 A 说 明 书 3/5 页 附图说明 图1是本发明履带车驱动总成的结构图。 图2是本发明履带车驱动总成的控制电气图。 图3是本发明履带车驱动总成的控制PLC控制器的电气示意图。 主要附图标记说明: 1-电机、2-第一联轴器、3-变速箱输入轴、4-第一电磁离合器、5-第一输出轴、6-第 二联轴器、7-太阳能输入轴、8-第二电磁离合器、9-主驱动轮、10-第三联轴器、11-第一差速 器、12-第三电磁离合器、13-齿圈、14-行星轮、15-太阳轮、16-变速箱行星架输出轴、17-第 四电磁离合器、18-第二输出轴、19-第二差速器、20-第四联轴器、21-主传动轴。











