
技术摘要:
本申请涉及一种电控制动系统及电控制动方法。所述电控制动系统的防抱死制动控制模块集成在电机控制器中,整车控制器用于根据踏板位置传感器采集的踏板位置信号和车速信号确定普通工况总目标转矩,并将所述普通工况总目标转矩发送至所述电机控制器;电机控制器用于根据 全部
背景技术:
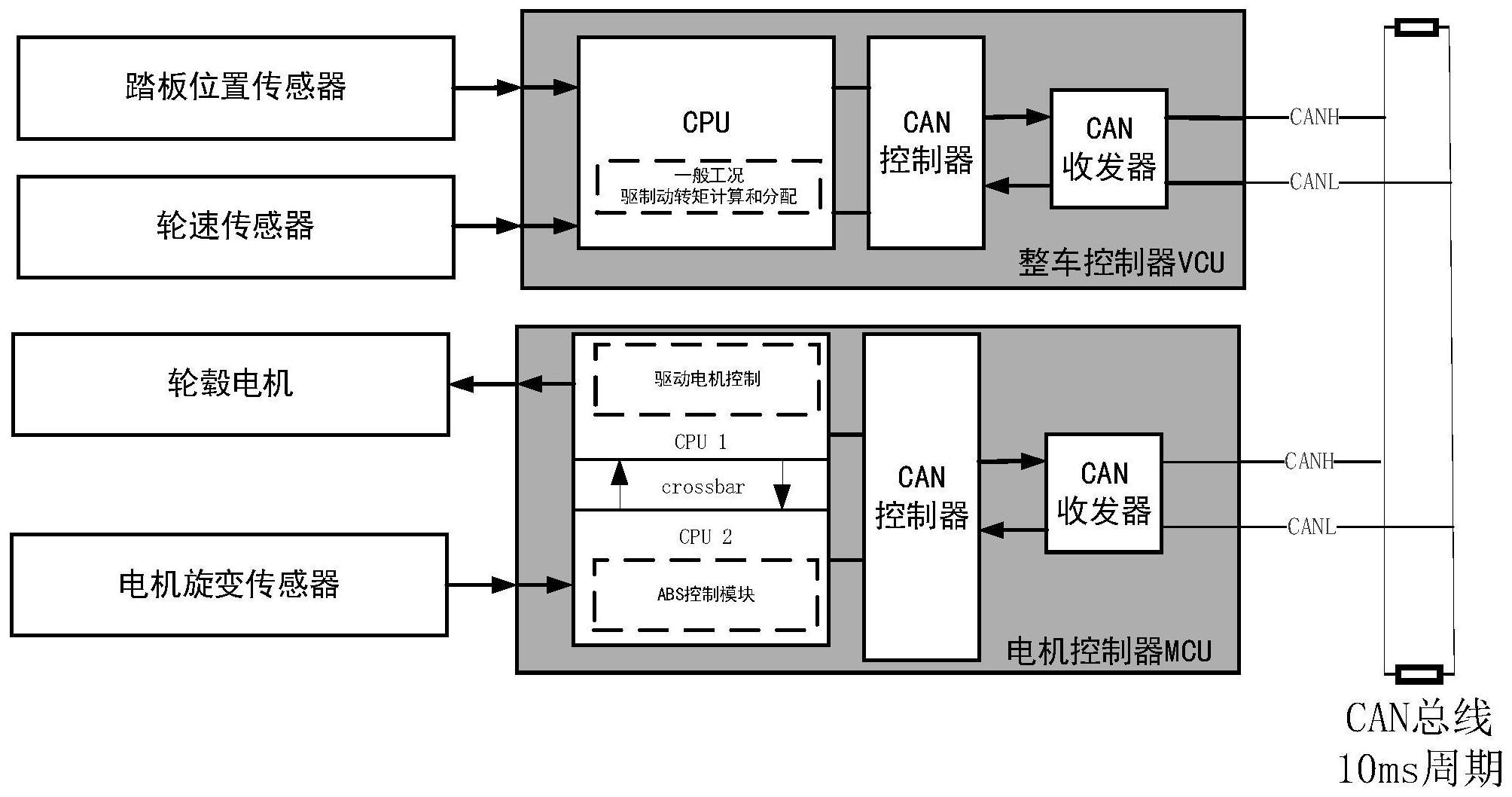
电驱动汽车具备高效率和低污染等特点,发展电驱动汽车可以有效解决当前社会 能源紧缺、环境污染和交通安全等问题;并且,由于分布式电驱动和集中式电驱动是电驱动 汽车采用的两类驱动形式,分布式电驱动相比集中式电驱动具备可以提高传动系效率、减 轻整车质量和提高容错性等优点,因此,使用分布式电驱动实现整车精确控制显得尤为重 要。 传统技术中关于分布式电驱动的电控制动系统,防抱死制动控制器、整车控制器 和电机控制器之间相互独立设置,整车控制器根据接收到的踏板位置信号和轮速信号确定 普通工况驱制动转矩信号后,并将该普通工况驱制动转矩信号通过CAN网络传输至电机控 制器进行电机驱动控制以及将接收到的轮速信号通过CAN网络传输至防抱死制动控制器进 行防抱死制动控制。 然而,传统电控制动系统中,在将普通工况驱制动转矩信号通过CAN网络传输防抱 死制动控制器以及将轮速信号传输至电机控制器时,会由于CAN网络的网络时滞产生不确 定的延迟因素,导致制动系统的控制性能降低甚至不稳定,从而影响行车安全。
技术实现要素:
基于此,有必要针对上述技术问题,提供一种能够提高制动响应速度、改善车辆制 动可靠性和安全性的电控制动系统及电控制动方法。 一种电控制动系统,包括:踏板位置传感器、轮速传感器、整车控制器、电机控制器 和防抱死制动控制模块,其特征在于,还包括电机旋变传感器,所述防抱死制动控制模块集 成在所述电机控制器中,所述踏板位置传感器和所述轮速传感器分别与所述整车控制器电 连接,所述电机旋变传感器与所述电机控制器电连接: 所述踏板位置传感器,用于采集踏板位置信号,并将所述踏板位置信号发送至所 述整车控制器;其中,所述踏板位置信号包括加速踏板位置和制动踏板位置; 所述轮速传感器,用于采集轮速信号,并将所述轮速信号发送至所述整车控制器; 所述电机旋变传感器,用于采集轮毂电机转速信号,并将所述轮毂电机转速信号 发送至所述电机控制器; 所述整车控制器,用于根据所述踏板位置信号和车速信号确定普通工况总目标转 矩,并将所述普通工况总目标转矩发送至所述电机控制器;其中,所述车速信号包括根据所 述轮速信号确定的信号,所述普通工况总目标转矩用于表征各电机在非紧急制动状态下的 驱制动转矩需求; 所述电机控制器,用于根据所述普通工况总目标转矩进行轮毂电机驱动控制;以 5 CN 111605410 A 说 明 书 2/19 页 及用于根据所述轮毂电机转速信号对应的目标转换轮速信号进行防抱死制动控制;其中, 所述目标转换轮速信号包括将所述轮毂电机转速信号输入至预设的扭转振动方程后得到 的信号。 在其中一个实施例中,所述整车控制器,还用于当接收到第一指令时,根据所述踏 板位置信号、所述轮速信号和所述车速信号确定普通工况总目标转矩,所述普通工况总目 标转矩中包括非紧急制动状况下各制动转矩和各驱动转矩对应的转矩需求,并将所述普通 工况总目标转矩发送至所述电机控制器,以使所述电机控制器根据所述转矩需求进行电机 驱动控制; 其中,所述第一指令包括根据驾驶员踩压踏板时生成的指令。 在其中一个实施例中,所述电机控制器,还用于当接收到紧急制动指令时,根据所 述目标转换轮速信号进行防抱死制动控制,得到目标转矩控制信号,并根据所述目标转矩 控制信号进行驱动电机控制;其中,所述紧急制动指令包括根据当前时刻的踏板位置满足 预设的踏板位置且当前时刻的车轮滑移率超过预设的滑移率范围时生成的指令。 在其中一个实施例中,所述电机控制器,还用于当接收到非紧急制动指令时,根据 所述普通工况总目标转矩进行驱动电机控制;其中,所述非紧急制动指令包括根据当前时 刻的踏板位置未满足预设的踏板位置和/或当前时刻的车轮滑移率未超过预设的滑移率范 围时生成的指令。 在一个实施例中,所述系统还包括通讯网络,所述通讯网络分别连接所述整车控 制器和所述电机控制器; 所述通讯网络,用于实时接收所述整车控制器发送的轮速信号、踏板位置信号,以 及所述电机控制器发送的轮毂电机转速信号。 在一个实施例中,所述防抱死制动控制模块,用于根据车速估计信号、踏板位置信 号和所述目标转换轮速信号,输出防抱死制动使能信号或者输出防抱死制动非使能信号; 其中,所述车速估计信号包括根据所述轮毂电机转速信号估计的信号; 所述电机控制器,还用于根据所述防抱死制动使能信号,控制轮毂电机按照所述 目标转换轮速信号进行防抱死制动控制;或者用于根据所述防抱死制动非使能信号,控制 轮毂电机按照所述普通工况总目标转矩进行轮毂电机驱动控制。 在一个实施例中,所述防抱死制动控制模块,还用于根据所述车速估计信号和所 述轮速信号确定车轮的滑移率估计值,并根据所述踏板位置信号和所述滑移率估计值,确 定踏板位置满足预设的踏板位置阈值且所述滑移率估计值超出预设的滑移率阈值时,输出 防抱死制动使能信号;或者确定所述踏板位置未满足所述踏板位置阈值和/或所述滑移率 估计值未超出所述滑移率阈值时,输出防抱死制动非使能信号。 在一个实施例中,所述扭转振动方程,包括: 其中, 6 CN 111605410 A 说 明 书 3/19 页 Jm表示等效电机转子转动惯量,Jh表示等效轮辋转动惯量,Jr 表示等效轮胎转动惯量,i13表示减速器传动比,Cmh表示减速箱等效扭转阻尼,Chr表示轮辋 胎面间等效扭转阻尼,Kmh表示减速器等效刚度,Khr表示轮辋胎面间等效刚度,Tm表示电机输 出转矩,Fx表示轮胎面受到地面的切向力,Rr表示轮胎半径,θm表示电机转子的转角,θh表示 轮毂与减速器输出端的转角,θr表示轮胎面的转角, 表示电机转子的转速, 表示轮毂与 减速器输出端的转速, 表示轮胎面的转速, 电机转子的转速加速度, 表示轮毂与减速 器输出端的转速加速度, 表示轮胎面的转速加速度。 在一个实施例中,所述电机控制器还用于输出电气信号,并根据所述电气信号驱 动轮毂电机。 一种电控制动方法,所述方法包括: 踏板位置传感器采集踏板位置信号,并将所述踏板位置信号发送至所述整车控制 器;其中,所述踏板位置信号包括加速踏板位置和制动踏板位置; 轮速传感器采集轮速信号,并将所述轮速信号发送至所述整车控制器; 电机旋变传感器采集轮毂电机转速信号,并将所述轮毂电机转速信号发送至所述 电机控制器; 整车控制器根据所述踏板位置信号和车速信号确定普通工况总目标转矩,并将所 述普通工况总目标转矩发送至所述电机控制器;其中,所述车速信号包括根据所述轮速信 号确定的信号,所述普通工况总目标转矩用于表征各电机在非紧急制动状态下的驱制动转 矩需求; 电机控制器根据所述普通工况总目标转矩进行轮毂电机驱动控制;以及根据所述 轮毂电机转速信号对应的目标转换轮速信号进行防抱死制动控制;其中,所述目标转换轮 速信号包括将所述轮毂电机转速信号输入至预设的扭转振动方程后得到的信号。 上述电控制动系统及电控制动方法,其中所述电控制动系统通过将防抱死制动控 制模块集成在电机控制器中以及设置电机控制器电连接电机旋变传感器,并直接将电机旋 变传感器接收到的轮毂电机转速信号转换为目标转换轮速信号,能够使得防抱死制动控制 模块的信号输入和输出完全在电机控制器中进行,以使所述电机控制器成为一个集成防抱 死制动控制功能和驱动电机控制功能的多核电机控制器,使得所述电机控制器在紧急制动 状况下车辆启动防抱死制动控制功能时仅需要在多核MCU芯片之间进行快速数据交互,避 免了现有电控制动系统中的电机控制器只能执行驱动电机控制功能的弊端,也避免了电控 制动系统中需要单独设置包括CAN收发器、CAN控制器和中央处理器的防抱死制动控制器才 能实现防抱死制动功能的弊端,不仅节省了硬件成本、简化了系统,也实现了电机控制器能 够有效并行处理驱动电机功能和防抱死制动控制功能的目的,从而实现了电控制动系统的 7 CN 111605410 A 说 明 书 4/19 页 协调不再占用CAN网络通讯、而是直接在电机控制器内部处理的目的,以此不仅能够大大减 少可能存在网络时滞的通讯环节,实现提高防抱死制动控制功能的响应速度的目的,也能 够通过所述电机控制器实现更加复杂的电机回馈制动和机械制动的复合控制,实现大大改 善车辆的纵向控制性能的目的,使得本申请的电控制动系统具有防止车轮抱死、缩短汽车 制动距离、缩短制动响应时间、减少轮胎磨损和避免汽车行驶跑偏的优势,从而也能够有效 提升汽车的制动性能及舒适性,也大大提升了汽车的安全性能;进一步地,所述电机控制器 在执行防抱死制动控制功能时所使用的目标转换轮速信号是将轮毂电机转速信号输入至 预设的扭转振动方程后得到的信号,以此避免单独设置的防抱死制动控制器通过整车控制 器和CAN总线传输过来的轮速信号执行防抱死制动控制功能时导致的制动响应速率低的问 题,有效提高了电机控制器直接根据所述目标转换轮速信号执行防抱死制动控制的制动响 应速率和制动转矩精度,缩短制动距离,且充分利用轮毂电机的制动作用,从而实现整车更 加精确和复杂的控制。 附图说明 图1为现有的分布式驱动结构图; 图2为现有的分布式驱动车辆的主流控制系统结构图; 图3A为一个实施例中电控制动系统的结构框图; 图3B为一个实施例中电控制动系统的算法流程示意图; 图4为一个实施例中电动轮的扭转振动模型的结构示意图; 图5为一个实施例中电控制动方法的流程示意图; 图6为另一实施例中电控制动方法的流程示意图; 图7为再一实施例中电控制动方法的流程示意图; 图8为又一实施例中电控制动方法的流程示意图; 图9为又一实施例中电控制动方法的流程示意图; 图10为一个实施例中电控制动装置的结构框图; 图11为一个实施例中计算机设备的内部结构图。











