
技术摘要:
本发明公开了一种全自动视觉锁边机,属于缝纫机械领域,全自动视觉锁边机包括物料驱动装置、缝纫装置、工作台以及电控箱,缝纫装置用以对待锁边物料进行锁边缝合,全自动视觉锁边机还包括视觉系统,视觉系统设在工作台的上方,以对待锁边物料进行取点巡迹,物料驱动装 全部
背景技术:
中国专利文献公开号CN205893585U公开的一种包边缝纫机,包括机架、工作台和 机头,工作台安装在机架上方,机头设有缝合材料的缝纫针,工作台上方通过立柱安装有X 轴移动机构、Y轴移动机构、W轴旋转机构、压盘安装座和压盘,X轴移动机构驱动压盘安装座 左右移动,Y轴移动机构驱动压盘安装座前后移动,W轴旋转机构驱动压盘旋转,采用本专利 的包边缝纫机时,X轴移动机构、Y轴移动机构、W轴旋转机构分别驱动压盘完成左右、前后、 自动运动,压盘压紧并带动待包边材料按预定的缝纫轨迹运动。 中国专利文献公开号CN107164888A公开的一种周边缝自动缝纫机,属于缝纫机技 术领域。本周边缝自动缝纫机,包括台板,台板上设置有辅助送料机构和用于缝纫的缝纫机 构,辅助送料机构能够将缝料压紧在台板上并带动缝料在台板上运动,台板上还设置有收 料组件,收料组件包括放料板,台板上开设有落料孔,放料板能够将落料孔封闭或者打开, 辅助送料机构能够将缝料输送到落料孔处。 但是,上述缝纫机通常只能对形状规则的待缝合件进行缝合,对于形状不规则的 异形件,需要多次装夹定位以完成缝合,操作繁琐,容易因多次装夹造成定位误差,降低产 品缝纫品质。或者需要通过输入选择不同的驱动程序以驱动机械臂根据不同形状的异形件 完成相应的锁边缝合动作,无法自动识别待缝合件的形状以智能匹配合适的锁边缝合程 序,操作繁琐,不够智能。
技术实现要素:
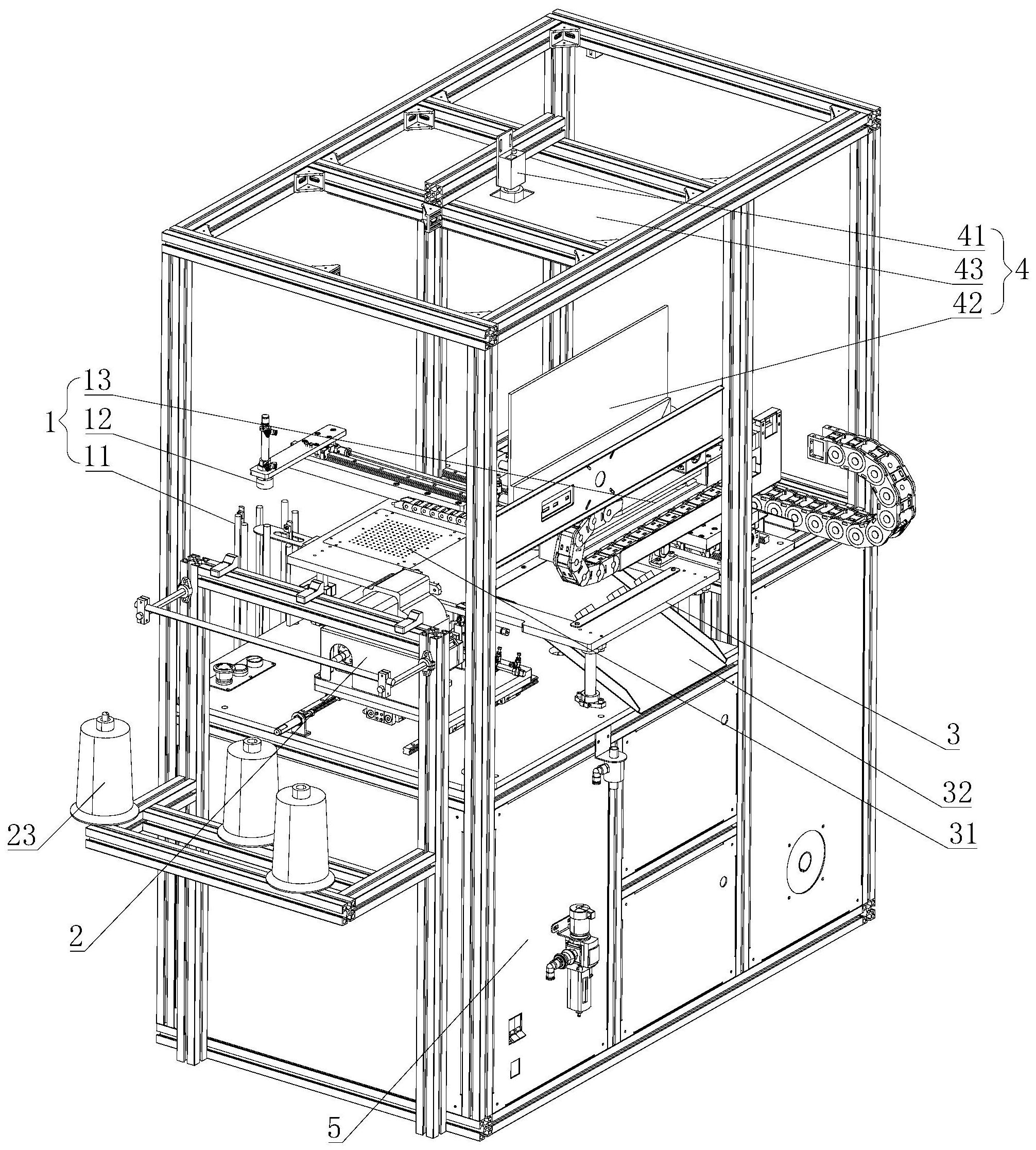
为了克服现有技术的缺陷,本发明所要解决的技术问题在于提出一种全自动视觉 锁边机,采用送料装置、取料装置以及压料装置相结合的物料驱动装置,配合视觉系统,可 以智能高效地对物料进行锁边缝合,可自动识别物料以智能适配加工,无需多次装夹物料, 减少定位误差,提高产品缝纫品质。 为达此目的,本发明采用以下技术方案: 本发明提供的一种全自动视觉锁边机,包括物料驱动装置、缝纫装置、工作台以及 电控箱,物料驱动装置用以驱动待锁边物料在工作台上位移,缝纫装置用以对待锁边物料 进行锁边缝合,物料驱动装置的信号端以及缝纫装置的信号端分别与电控箱的信号端电性 连接,全自动视觉锁边机还包括视觉系统,视觉系统设在工作台的上方,以对待锁边物料进 行取点巡迹,物料驱动装置包括送料装置、取料装置以及压料装置,送料装置的出料端与取 料装置的进料端相适配,取料装置用以将待锁边物料送至工作台上,压料装置用以驱动待 锁边物料在工作台上位移,送料装置的信号端、取料装置的信号端、压料装置的信号端以及 视觉系统的信号端分别与电控箱的信号端电性连接。 本发明优选地技术方案在于,视觉系统包括工业相机组以及触控显示屏,工业相 4 CN 111575920 A 说 明 书 2/5 页 机组的信号端与触控显示屏的信号端电性连接,工业相机组设在工作台的上方,以对待锁 边物料进行取点巡迹,工业相机组的信号端以及触控显示屏的信号端分别与电控箱的信号 端电性连接。 本发明优选地技术方案在于,送料装置包括升降机构、分料托盘架、物料档杆托 架、行程感应机构以及物料感应机构,分料托盘架固定在升降机构的动力输出端上,升降机 构可带动分料托盘架作往复升降运动,以使分料托盘架将待锁边物料从物料档杆托架送至 取料装置的进料端,行程感应机构设在升降机构上,以限制升降机构的位移行程,物料感应 机构设在物料档杆托架的出料端上,以检测物料是否充足,升降机构的信号端、行程感应机 构的信号端以及物料感应机构的信号端分别与电控箱的信号端电性连接。 本发明优选地技术方案在于,取料装置包括水平进给气缸组、导轨滑块组、连接组 件、竖向进给气缸组以及吸盘件,水平进给气缸组的伸缩杆端与连接组件的一端固定连接, 连接组件的另一端与竖向进给气缸组的缸体固定连接,连接组件固定在导轨滑块组上,水 平进给气缸组以及导轨滑块组分别固定在工作台上,竖向进给气缸组的伸缩杆端穿过连接 组件与吸盘件固定连接,送料装置的出料端与吸盘件相适配,水平进给气缸组的信号端以 及竖向进给气缸组的信号端分别与电控箱的信号端电性连接,水平进给气缸组的伸缩杆端 沿水平方向作水平进给运动,可通过连接组件带动竖向进给气缸组沿导轨滑块组的轴向作 往复水平进给运动,竖向进给气缸组的伸缩杆端沿竖向作升降进给运动,可带动吸盘件作 往复升降运动,使吸盘件将吸取的物料移动到工作台上,以使缝纫装置对物料进行锁边缝 合动作。 本发明优选地技术方案在于,压料装置包括X轴进给模组、Y轴进给模组、Z轴升降 模组、旋转模组以及压料杆组,X轴进给模组的动力输出端与Y轴进给模组固定连接,Y轴进 给模组的动力输出端与Z轴升降模组固定连接,Z轴升降模组的动力输出端与旋转模组固定 连接,旋转模组的动力输出端与压料杆组固定连接,X轴进给模组的信号端、Y轴进给模组的 信号端、Z轴升降模组的信号端以及旋转模组的信号端分别与电控箱的信号端电性连接。 本发明优选地技术方案在于,视觉系统还包括照明灯组,照明灯组设在工作台的 上方,以使工业相机组实现补光摄影,照明灯组的信号端与电控箱的信号端电性连接。 本发明优选地技术方案在于,缝纫装置包括缝纫机构、剪线机构以及绕线机构,缝 纫机构用以对待锁边物料进行锁边缝合,剪线机构用以剪断线头,绕线机构用以放置线圈 并向缝纫机构实时送线,缝纫机构的信号端、剪线机构的信号端以及绕线机构的信号端分 别与电控箱的信号端电性连接。 本发明优选地技术方案在于,工作台上设有外接真空泵机的真空定位区,以防物 料跑位偏移。 本发明优选地技术方案在于,工作台上设有用以回收物料的收料导槽。 本发明的有益效果为: 本发明提供的全自动视觉锁边机,电控箱控制送料装置将待锁边物料传输给取料 装置,取料装置再将物料送至工作台,然后,视觉系统可自动识别物料,并将物料形状信息 以及位置信息传输给电控箱进行分析处理,电控箱会依据物料形状信息和位置信息适配合 适的加工轨迹路径,并控制压料装置沿适配的加工轨迹路径,压紧物料并驱动物料在工作 台上移动以及旋转,以配合缝纫装置对待锁边物料进行锁边缝合。通过上述过程,使全自动 5 CN 111575920 A 说 明 书 3/5 页 视觉锁边机可以智能高效地对物料进行锁边缝合,可自动识别物料以智能适配加工,无需 多次装夹物料,减少定位误差,提高产品缝纫品质。 附图说明 图1是本发明











