
技术摘要:
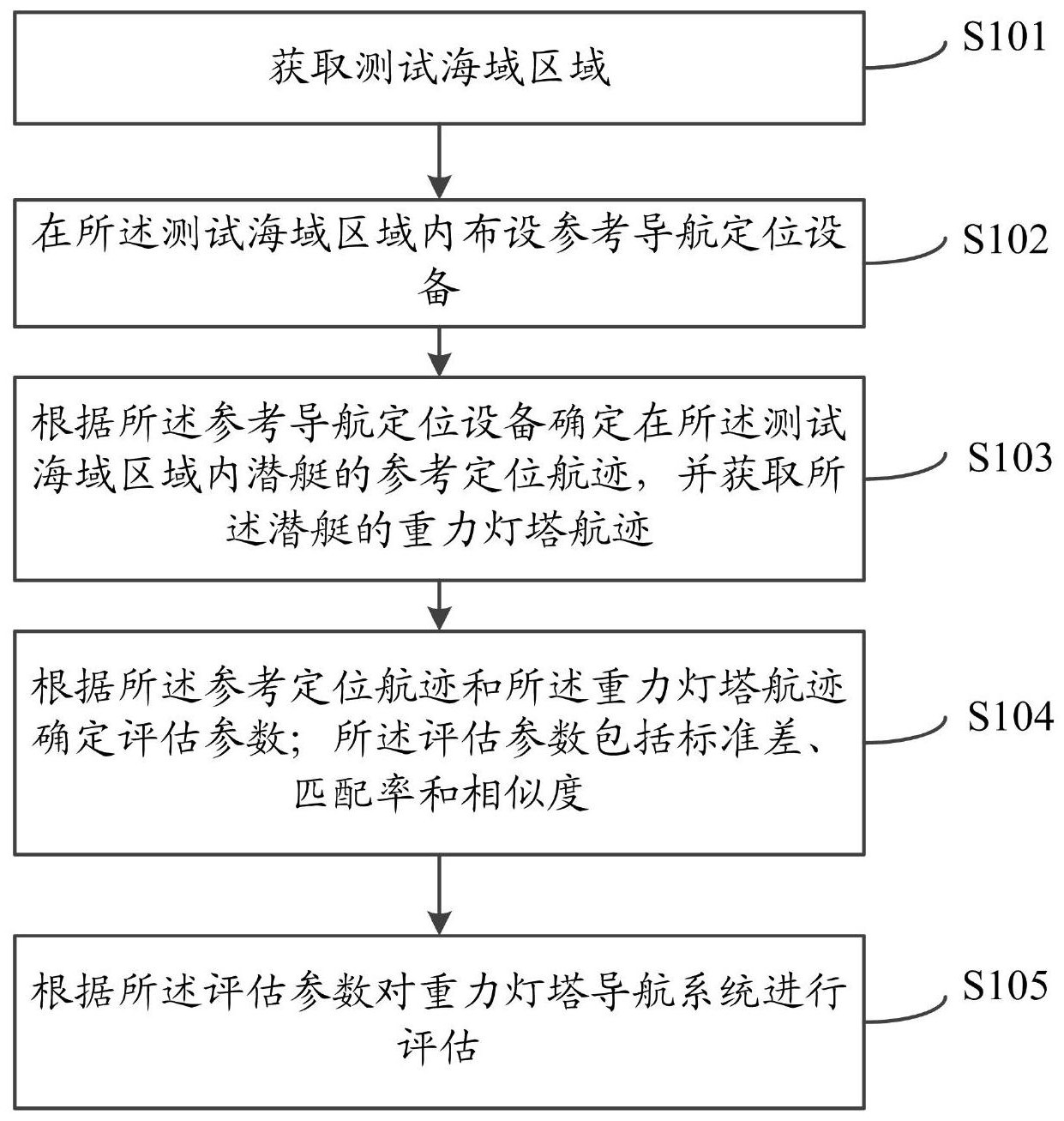
本发明涉及一种基于重力灯塔的导航效能评估方法及系统。所述方法包括获取测试海域区域;在所述测试海域区域内布设参考导航定位设备;根据所述参考导航定位设备确定在所述测试海域区域内潜艇的参考定位航迹,并获取所述潜艇的重力灯塔航迹;根据所述参考定位航迹和所述 全部
背景技术:
传统情况下,对潜艇导航精度的评估方式为:潜艇近海面航行,释放出连 接有 GNSS接收天线的光缆,将导航卫星定位数据和艇载导航系统定位结果进 行比对,计算二者 均方差,作为最终的评价指标。这种方式并未考虑潜艇航行 所处的海洋区域环境,且比对 指标片面,很难对导航系统的优劣做出有效且全 面的界定。
技术实现要素:
本发明的目的是提供一种基于重力灯塔的导航效能评估方法及系统,能够 更全 面、更精确的评价重力灯塔导航系统的效能。 为实现上述目的,本发明提供了如下方案: 一种基于重力灯塔的导航效能评估方法,包括: 获取测试海域区域;所述测试海域区域划分为多个网格;所述测试海域区 域内设 定比例值的所述格网的粗糙度大于粗糙度阈值,且所述测试海域区域中 的每个所述格网 的平均水深在水深设定范围内; 在所述测试海域区域内布设参考导航定位设备;所述参考导航定位设备包 括水 下信标、浮标、基准站和应答器; 根据所述参考导航定位设备确定在所述测试海域区域内潜艇的参考定位 航迹, 并获取所述潜艇的重力灯塔航迹;所述潜艇装载有卫星定位天线、接收 机、重力灯塔导航 系统和应答器;所述参考定位航迹包括第一参考定位航迹、 第二参考定位航迹和第三参考 定位航迹; 根据所述参考定位航迹和所述重力灯塔航迹确定评估参数;所述评估参数 包括 标准差、匹配率和相似度; 根据所述评估参数对重力灯塔导航系统进行评估。 可选的,所述在所述测试海域区域内布设参考导航定位设备,具体包括: 在所述测试海域区域海面的四个角均布设四角各布设一个带有主被动声 纳的浮 标; 在所述测试海域区域海面的布设三个呈等腰三角形分布基准站; 在所述测试海域区域海底的四个角均布设一个带有主被动声纳的信标。 可选的,所述根据所述参考导航定位设备确定在所述测试海域区域内潜艇 的参 考定位航迹,并获取所述潜艇的重力灯塔航迹,具体包括: 根据所述参考导航定位设备获取所述潜艇在第一深度处的所述第一参考 定位航 迹; 5 CN 111595360 A 说 明 书 2/9 页 获取与所述第一参考定位航迹对应的第一重力灯塔航迹; 根据所述参考导航定位设备获取所述潜艇在第二深度处的所述第二参考 定位航 迹; 获取与所述第二参考定位航迹对应的第二重力灯塔航迹; 根据所述参考导航定位设备获取所述潜艇在第三深度处的所述第三参考 定位航 迹; 获取与所述第三参考定位航迹对应的第三重力灯塔航迹。 可选的,所述根据所述参考定位航迹和所述重力灯塔航迹确定评估参数, 具体包 括: 利用公式 所述潜艇的位置距离差; (T1i,L1i,B1i)为所述参考定位航迹中潜艇的坐标,(T2i,L2i,B2i)为所述重力灯塔航 迹中 潜艇的坐标,n为定位坐标的数目;Ai为航迹中第i个位置距离差; 利用公式 确定平均距离; 利用公式 确定标准差; 利用公式 确定偏差度;STDmax为标准差阈值; 利用公式 确定匹配率;m为位置距离差小于或等于距离阈值的定位坐 标的 数目; 利用公式 确定相似度。 可选的,所述根据所述评估参数对重力灯塔导航系统进行评估,之后还包 括: 根据所述评估参数确定立体雷达图。 一种基于重力灯塔的导航效能评估系统,包括: 测试海域区域获取模块,用于获取测试海域区域;所述测试海域区域划分 为多个 网格;所述测试海域区域内设定比例值的所述格网的粗糙度大于粗糙度 阈值,且所述测试 海域区域中的每个所述格网的平均水深在水深设定范围内; 参考导航定位设备布设模块,用于在所述测试海域区域内布设参考导航定 位设 备;所述参考导航定位设备包括水下信标、浮标、基准站和应答器; 航迹确定模块,用于根据所述参考导航定位设备确定在所述测试海域区域 内潜 艇的参考定位航迹,并获取所述潜艇的重力灯塔航迹;所述潜艇装载有卫 星定位天线、接 收机、重力灯塔导航系统和应答器;所述参考定位航迹包括第 一参考定位航迹、第二参考 定位航迹和第三参考定位航迹; 评估参数确定模块,用于根据所述参考定位航迹和所述重力灯塔航迹确定 评估 参数;所述评估参数包括标准差、匹配率和相似度; 评估模块,用于根据所述评估参数对重力灯塔导航系统进行评估。 6 CN 111595360 A 说 明 书 3/9 页 可选的,所述参考导航定位设备布设模块具体包括: 第一布设单元,用于在所述测试海域区域海面的四个角均布设四角各布设 一个 带有主被动声纳的浮标; 第二布设单元,用于在所述测试海域区域海面的布设三个呈等腰三角形分 布基 准站; 第三布设单元,用于在所述测试海域区域海底的四个角均布设一个带有主 被动 声纳的信标。 可选的,所述航迹确定模块具体包括: 第一参考定位航迹确定单元,用于根据所述参考导航定位设备获取所述潜 艇在 第一深度处的所述第一参考定位航迹; 第一重力灯塔航迹获取单元,用于获取与所述第一参考定位航迹对应的第 一重 力灯塔航迹; 第二参考定位航迹确定单元,用于根据所述参考导航定位设备获取所述潜 艇在 第二深度处的所述第二参考定位航迹; 第二重力灯塔航迹获取单元,用于获取与所述第二参考定位航迹对应的第 二重 力灯塔航迹; 第三参考定位航迹确定单元,用于根据所述参考导航定位设备获取所述潜 艇在 第三深度处的所述第三参考定位航迹; 第三重力灯塔航迹获取单元,用于获取与所述第三参考定位航迹对应的第 三重 力灯塔航迹。 可选的,所述评估参数确定模块具体包括: 位置距离差确定单元,用于利用公式 所述潜艇的位置距离差;(T1i,L1i,B1i)为所述参考定位航迹中潜艇的坐标, (T2i,L2i,B2i) 为所述重力灯塔航迹中潜艇的坐标,n为定位坐标的数目;Ai为航 迹中第i个位置距离差; 平均距离确定单元,用于利用公式 确定平均距离; 标准差确定单元,用于利用公式 确定标准差; 偏差度确定单元,用于利用公式 确定偏差度;STDmax为标准差 阈值; 匹配率确定单元,用于利用公式 确定匹配率;m为位置距离差小于或 等于距 离阈值的定位坐标的数目; 相似度确定单元,用于利用公式 确定相似度。 可选的,还包括: 立体雷达图确定模块,用于根据所述评估参数确定立体雷达图。 根据本发明提供的具体实施例,本发明公开了以下技术效果: 7 CN 111595360 A 说 明 书 4/9 页 本发明所提供的一种基于重力灯塔的导航效能评估方法及系统,通过根据 所述 参考导航定位设备确定在所述测试海域区域内潜艇的参考定位航迹,并获 取所述潜艇的 重力灯塔航迹,而参考定位航迹包括多种参考,不同检核设备的 重力灯塔导航效能评估试 验场,能对重力灯塔的导航效果进行全方位的评价。 并且,根据所述参考定位航迹和所述 重力灯塔航迹确定评估参数,所述评估参 数包括标准差、匹配率和相似度,即从航迹距离 差异、单个航迹点匹配情况以 及航迹形态差异三种角度进行综合评价,避免了单一评价数 学指标带来的片面 性。进而,能够更全面、更精确的评价重力灯塔导航系统的效能。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施 例中 所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是 本发明的一些实 施例,对于本领域普通技术人员来讲,在不付出创造性劳动性 的前提下,还可以根据这些 附图获得其他的附图。 图1为本发明所提供的一种基于重力灯塔的导航效能评估方法示意图; 图2为本发明在所述测试海域区域内布设参考导航定位设备示意图; 图3为潜艇在第一深度处的示意图; 图4为第一参考定位航迹与第一重力灯塔航迹示意图; 图5为潜艇在第二深度处的示意图; 图6为第二参考定位航迹与第二重力灯塔航迹示意图; 图7为潜艇在第三深度处的示意图; 图8为第三参考定位航迹与第三重力灯塔航迹示意图; 图9为根据所述参考定位航迹和所述重力灯塔航迹确定评估参数的评估 航迹示 意图; 图10为立体雷达图; 图11为本发明所提供的一种基于重力灯塔的导航效能评估系统示意图;











