
技术摘要:
本发明公开沿边行走中返回起点的判断方法、芯片及视觉机器人,该判断方法包括:判断移动机器人当前位置与预设沿边起点的相对位置关系是否符合重合误差条件,是则确定移动机器人已经返回预设沿边起点,否则确定移动机器人没有返回预设沿边起点。该技术方案设置清洁机器 全部
背景技术:
扫地机器人常常通过沿边一圈来清扫房间里的各个边边角角。由于机器人视觉惯 导传感器构建的地图会随着时间的推移而出现漂移误差,当地图漂移值过大时,地图定位 的错误概率增大,从而影响机器人根据构建的地图对自身位置实现实时定位,使得如何判 断扫地机器人沿边行走是否回到起点一直都是困扰扫地机器人的一个难点。
技术实现要素:
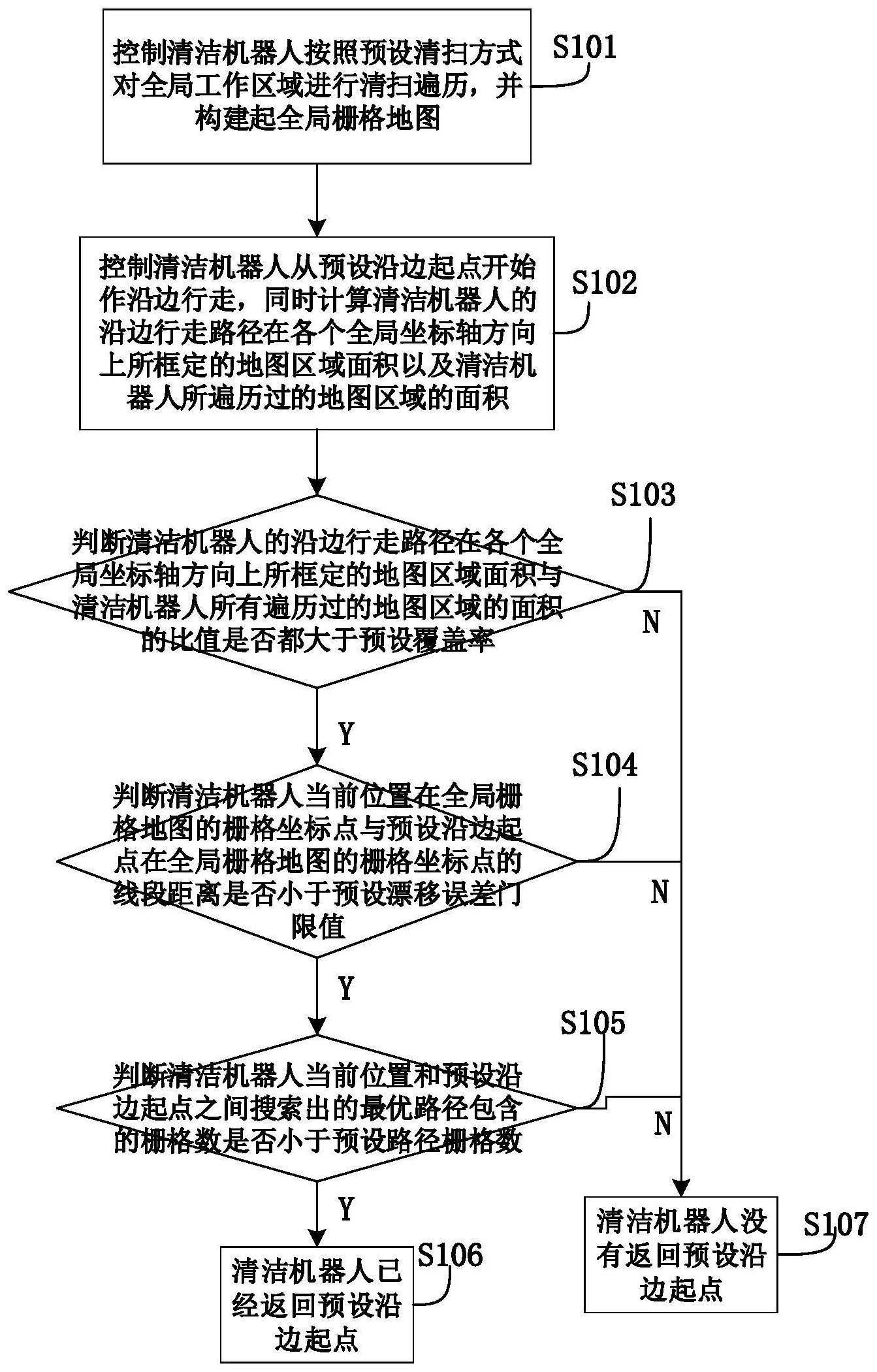
为了解决上述技术问题,本发明公开一种依靠全局栅格地图实现精准判断移动机 器人是否返回起点的方法,具体的技术方案如下: 一种沿边行走过程中返回起点的判断方法,包括:判断移动机器人当前位置与预设沿 边起点的相对位置关系是否符合重合误差条件,是则确定移动机器人已经返回预设沿边起 点,否则确定移动机器人没有返回预设沿边起点。该技术方案设置清洁机器人当前位置和 预设沿边起点的相对位置关系的判断条件来衡量机器人在构建的全局地图中位置漂移程 度,使得清洁机器人能够克服全局地图中位置漂移带来的定位误差,实现精准判断出移动 机器人是否返回所述预设沿边起点。 进一步地,所述移动机器人当前位置与预设沿边起点的相对位置关系符合重合误 差条件包括:移动机器人当前位置在全局栅格地图的栅格坐标点与预设沿边起点在全局栅 格地图的栅格坐标点的线段距离符合预设漂移阈值条件,且移动机器人当前位置和预设沿 边起点之间搜索出的最优路径符合预设重合定位条件。该技术方案同时设置清洁机器人当 前位置和预设沿边起点的相对栅格位置关系及其优化路径的判断条件检测出地图漂移情 况下的清洁机器人定位回预设沿边起点的误差大小。 进一步地,所述预设漂移阈值条件是移动机器人当前位置在全局栅格地图的栅格 坐标点与所述预设沿边起点在全局栅格地图的栅格坐标点的线段距离小于预设漂移误差 门限值;当移动机器人当前位置在全局栅格地图的坐标点与所述预设沿边起点在全局栅格 地图的坐标点的连线距离大于或等于预设漂移误差门限值时,确定移动机器人没有返回所 述预设沿边起点。该技术方案利用清洁机器人当前位置与所述预设沿边起点在全局栅格地 图的坐标连线距离作为机器人返回所述预设沿边起点的预判条件,排除过于严重的地图漂 移对清洁机器人返回所述预设沿边起点带来的影响。 进一步地,所述预设重合定位条件是移动机器人当前位置和预设沿边起点之间搜 索出的最优路径包含的栅格数小于预设路径栅格数;在移动机器人当前位置在全局栅格地 图的栅格坐标点与所述预设沿边起点在全局栅格地图的栅格坐标点的连线距离符合所述 预设漂移阈值条件的前提下,如果移动机器人当前位置和所述预设沿边起点之间搜索出的 5 CN 111580525 A 说 明 书 2/14 页 最优路径包含的栅格数大于预设路径栅格数,则确定移动机器人没有返回所述预设沿边起 点。在前述技术方案的基础上,利用清洁机器人当前位置和所述预设沿边起点之间搜索出 的最优路径长度,判断确定清洁机器人当前位置和所述预设沿边起点的重合定位条件,当 路径长度足够小时,在定位误差允许的范围内可以认为清洁机器人当前位置和所述预设沿 边起点是重合的。提高机器人的定位精度。 进一步地,所述移动机器人当前位置和预设沿边起点之间搜索出的最优路径是: 根据所述移动机器人当前位置和所述预设沿边起点,利用A*算法求出最短路径以作为移动 机器人导航回所述预设沿边起点的最优路径。帮助机器人以最短路径返回所述预设沿边起 点。 进一步地,在判断移动机器人当前位置与预设沿边起点的相对位置关系是否符合 重合误差条件之前,还包括:判断清洁机器人的沿边行走路径在全局栅格地图的各个全局 坐标轴方向上所框定的地图区域面积与清洁机器人所遍历过的地图区域的面积的比值是 否符合预设覆盖率条件,是则判断移动机器人当前位置与预设沿边起点的相对位置关系是 否符合重合误差条件。该技术方案能够利用清洁机器人的沿边行走路径在全局地图上框定 的区域面积的判断条件来衡量机器人在复杂多变清扫场景中沿边的覆盖范围,同时结合清 洁机器人当前位置和预设沿边起点的相对位置关系,克服复杂多变清扫场景造成机器人对 完整沿全局工作区域一圈行走的误判,实现清洁机器人精准判断出是否通过沿边行走返回 所述预设沿边起点,以更好地适用于家居环境,实现跨多个子工作区域连续清扫作业。 进一步地,在判断清洁机器人的沿边行走路径在全局栅格地图的各个全局坐标轴 方向上所框定的地图区域面积与清洁机器人所遍历过的地图区域的面积的比值是否符合 预设覆盖率条件的同时,清洁机器人在这个全局工作区域内从预设沿边起点开始作沿边行 走,并计算清洁机器人的沿边行走路径在全局栅格地图的各个全局坐标轴方向上所框定的 地图区域面积以及清洁机器人所遍历过的地图区域的面积。保证机器人实时判断是否返回 预设沿边起点的准确性。 进一步地,所述预设覆盖率条件是清洁机器人的沿边行走路径在水平坐标轴方向 上所框定的地图区域面积与清洁机器人所有遍历过的地图区域的面积的比值大于预设覆 盖率,且清洁机器人的沿边行走路径在竖直坐标轴方向上所框定的地图区域面积与清洁机 器人所有遍历过的地图区域的面积的比值大于预设覆盖率;其中,全局坐标轴方向包括水 平坐标轴方向和竖直坐标轴方向;当清洁机器人的沿边行走路径在水平坐标轴方向上所框 定的地图区域面积与清洁机器人所有遍历过的地图区域的面积的比值小于或等于预设覆 盖率,或者,清洁机器人的沿边行走路径在竖直坐标轴方向上所框定的地图区域面积与清 洁机器人所有遍历过的地图区域的面积的比值小于或等于预设覆盖率时,确定清洁机器人 没有完整地沿所述全局工作区域行走一圈。该技术方案从机器人行走的覆盖率角度出发, 充分考虑清洁机器人的沿边行走路径在竖直坐标轴方向或水平坐标轴方向上所框定的地 图区域面积对沿边行走返回起点的影响,从而将其与清洁机器人所有遍历过的地图区域的 面积的比值作为覆盖率的判断量。 进一步地,在清洁机器人在这个全局工作区域内从预设沿边起点开始作沿边行走 之前,还包括:控制清洁机器人按照预设清扫方式对全局工作区域进行清扫遍历,并根据清 扫遍历过程中记录的信息构建起全局栅格地图;其中,所述清洁机器人所有遍历过的地图 6 CN 111580525 A 说 明 书 3/14 页 区域的面积是从清洁机器人按照预设清扫方式对全局工作区域进行清扫遍历时开始计算 的;根据所述全局栅格地图的尺寸大小设置地图遍历块的边长,进而在地图遍历块的边长 的基础上,通过计算全局栅格地图的尺寸大小和地图遍历块的边长的比值关系确定所述全 局栅格地图的各个全局坐标轴方向上的地图遍历块的覆盖数量;然后结合地图遍历块的边 长及其个数计算地图遍历块的映射坐标,将地图遍历块布局到所述全局栅格地图的每一行 和每一列;其中,所述全局栅格地图的每一行的地图遍历块都设置在所述水平坐标轴方向 上且在所述竖直坐标轴方向上的投影重合,所述全局栅格地图的每一列的地图遍历块都设 置在所述竖直坐标轴方向上且在所述水平坐标轴方向上的投影重合;其中,每一个地图遍 历块都是依据其映射坐标合并所述全局栅格地图的栅格而成的。该技术方案有规则地将全 局工作区域分割为地图遍历块,这些行列规则排布的地图遍历块能够反映出全局工作区域 的环境特征,适用于处理各种尺度的全局栅格地图,提高算法的自适应程度;同时,节约全 局地图中的栅格面的运算资源,加快数据处理速度。 进一步地,当清洁机器人遍历过所述地图遍历块内部的任一栅格时,标记对应的 地图遍历块为已走过的地图遍历块;当清洁机器人沿边行走入所述地图遍历块的内部时, 同时标记地图遍历块为沿边地图遍历块和已走过的地图遍历块,使得所述沿边行走路径由 沿边地图遍历块组成。相对于栅格标记方式,地图遍历块记录更大的路径区域范围,减小标 记同一段路径所用的标记块的数目,降低了对清洁机器人的算力要求和存储空间要求,减 少建图时间。 进一步地,所述计算清洁机器人的沿边行走路径在全局栅格地图的各个全局坐标 轴方向上所框定的地图区域的面积包括:计算清洁机器人的沿边行走路径在全局栅格地图 的竖直坐标轴方向上所框定的地图区的域面积和计算清洁机器人的沿边行走路径在全局 栅格地图的水平坐标轴方向上所框定的地图区域的面积;计算清洁机器人的沿边行走路径 在全局栅格地图的竖直坐标轴方向上所框定的地图区域的面积的方法包括:判断所述全局 栅格地图的每一列的地图遍历块中是否存在所述沿边地图遍历块,是则在对应一列上,统 计最下端的所述沿边地图遍历块至最上端的所述沿边地图遍历块之间的地图遍历块的数 目,记为清洁机器人的沿边行走路径在这一列所框定的地图区域的面积;其中,清洁机器人 的沿边行走路径在每一列所框定的地图区域包括同一列最下端的所述沿边地图遍历块和 最上端的所述沿边地图遍历块;当按照前述步骤判断完所述全局栅格地图的所有列的地图 遍历块时,将清洁机器人的沿边行走路径在每一列所框定的地图区域的面积之和设置为清 洁机器人的沿边行走路径在全局栅格地图的竖直坐标轴方向上所框定的地图区域的面积; 计算清洁机器人的沿边行走路径在全局栅格地图的水平坐标轴方向上所框定的地图区域 的面积的方法包括:判断所述全局栅格地图的每一行中是否存在所述沿边地图遍历块,是 则在对应一行上,统计最左端的所述沿边地图遍历块至最右端的所述沿边地图遍历块之间 的地图遍历块的数目,记为清洁机器人的沿边行走路径在这一行所框定的地图区域的面 积;其中,清洁机器人的沿边行走路径在每一行所框定的地图区域包括同一行最左端的所 述沿边地图遍历块和最右端的所述沿边地图遍历块;当按照前述步骤判断完所述全局栅格 地图的所有行的地图遍历块时,将清洁机器人的沿边行走路径在每一行所框定的地图区域 的面积之和设置为清洁机器人的沿边行走路径在全局栅格地图的水平坐标轴方向上所框 定的地图区域的面积。 7 CN 111580525 A 说 明 书 4/14 页 与现有技术相比,在全局栅格地图每一列地图遍历块中,通过统计最下端的所述 沿边地图遍历块与最上端的所述沿边地图遍历块之间所包含的地图遍历块的数目,来计算 出沿边行走路径在全局栅格地图的竖直坐标轴方向上所框定的地图区域的面积;在全局栅 格地图每一行地图遍历块中,通过统计最左端的所述沿边地图遍历块与最右端的所述沿边 地图遍历块之间所包含的地图遍历块的数目,来计算出沿边行走路径在全局栅格地图的水 平坐标轴方向上所框定的地图区域的面积;该技术方案让沿边行走路径在全局坐标系的每 一坐标轴方向上所框定的地图区域的面积都能完整地代表清洁机器人当前沿边行走的覆 盖范围,地图遍历块的使用也减小现有技术全局地图中的栅格面积的运算量。 一种芯片,内置控制程序,所述控制程序用于控制移动机器人执行所述判断方法。 一种视觉机器人,该视觉机器人内置所述的芯片,用于在视觉机器人执行所述判 断方法的过程中克服地图漂移的影响,以实现准确判断视觉机器人回到所述预设沿边起 点。 附图说明 图1是本发明实施例的一种沿边行走过程中返回起点的判断方法的流程图。 图2是本发明实施例的移动机器人在全局工作区域内完整地沿边一圈并返回预设 沿边起点A的工作场景示意图(忽略墙体宽度的影响)。 图3是移动机器人在全局工作区域内所标记的沿边地图遍历块(斜线填充方框)在 X轴方向上框定的区域面积不符合预设覆盖率条件的工作场景示意图。 图4是移动机器人当前位置和预设沿边起点之间线段长度满足预设漂移阈值条件 的工作场景示意图(忽略墙体宽度的影响)。











