
技术摘要:
本申请公开了一种变电站人员三维空间定位方法、装置和设备,通过获得进入变电站目标区域的人员的身高和通过多个摄像头拍摄该人员站立状态下的影像,根据各影像中人像的像素信息,结合该人员的身高和摄像头信息,计算出该人员的头顶距每个摄像头的距离,再根据距离数学 全部
背景技术:
在变电站的工作人员在变电站内作业行走时,存在发生安全事故的风险,因此,在 现有的变电站管理中,往往会对在变电站内的工作人员进行定位。 现有的变电站人员定位技术通常是需要被定位人员携带特定定位设备,如使用 GPS系统对被定位人员进行定位时,被定位人员需要携带GPS定位设备,通过卫星的通讯来 进行定位;使用RFID定位技术对被定位人员进行定位时,要求被定位人员携带有RFID标签; 使用基于声音测距技术对被定位人员进行定位时,要求被定位人员携带发出声波和接收声 波的设备,等等。这些现有的定位技术,如果被定位人员不愿意进行定位或不愿公开定位结 果,不携带或不开启定位设备,则定位系统将无法对其进行定位,使得对变电站作业人员的 安全管理受到阻碍。
技术实现要素:
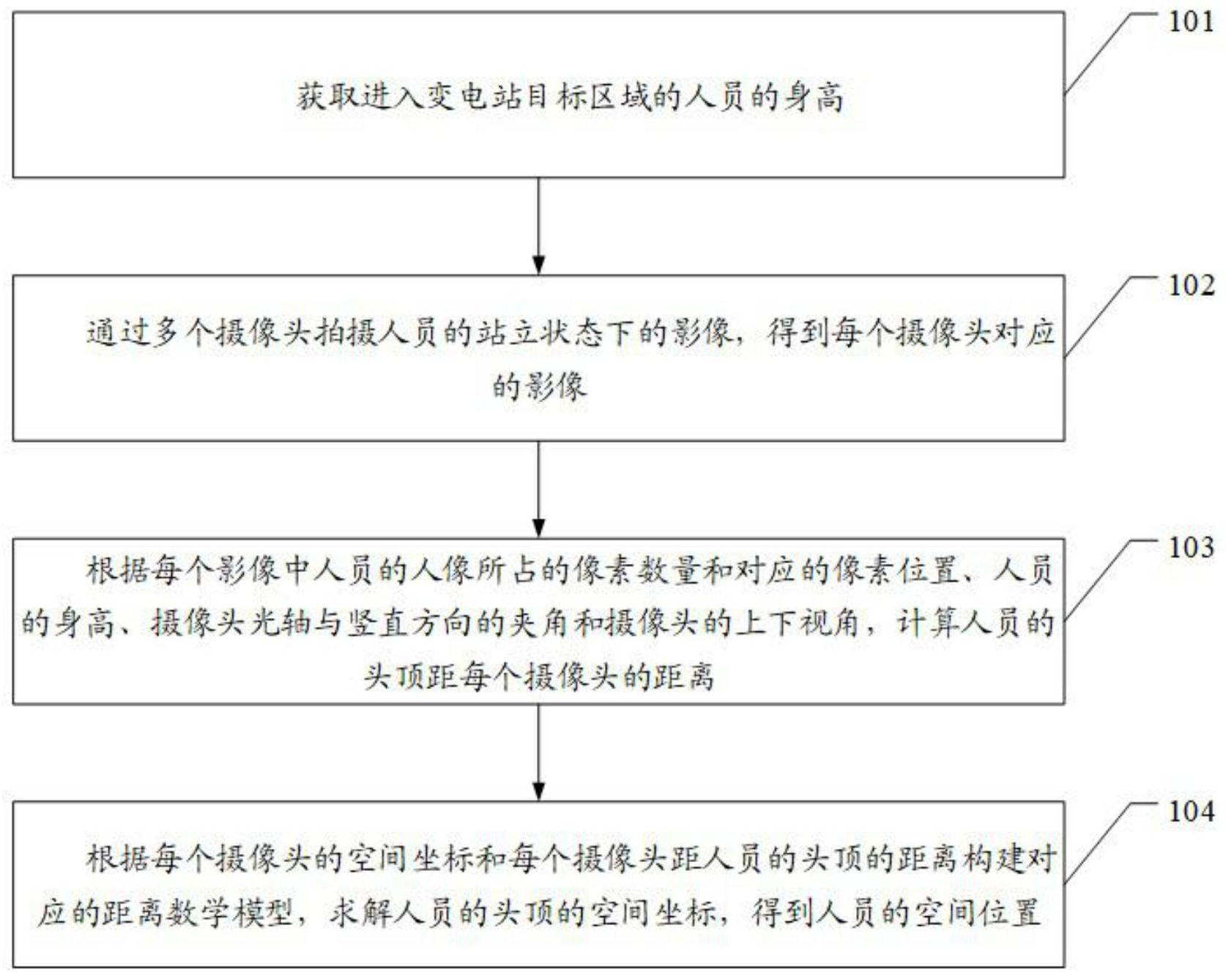
本申请提供了一种变电站人员三维空间定位方法、装置和设备,用于解决现有的 变电站人员定位方式需要被定位人员携带特定定位设备,在被定位人员不携带或不开启定 位设备时,定位系统无法对被定位人员进行定位,使得对变电站作业人员的安全管理受到 阻碍的技术问题。 有鉴于此,本申请第一方面提供了一种变电站人员三维空间定位方法,包括: 获取进入变电站目标区域的人员的身高; 通过多个摄像头拍摄所述人员的站立状态下的影像,得到每个摄像头对应的影 像; 根据每个影像中所述人员的人像所占的像素数量和对应的像素位置、所述人员的 身高、摄像头光轴与竖直方向的夹角和摄像头的上下视角,计算所述人员的头顶距每个摄 像头的距离; 根据每个摄像头的空间坐标和每个摄像头距所述人员的头顶的距离构建对应的 距离数学模型,求解所述人员的头顶的空间坐标,得到所述人员的空间位置。 可选地,所述获取进入变电站目标区域的人员的身高,包括: 对进入变电站目标区域的人员进行身份识别,从人员信息库中获取所述人员的人 员信息,得到所述人员的身高。 可选地,所述对进入变电站目标区域的人员进行身份识别之前,还包括: 采集变电站人员信息,构建变电站人员信息库,所述变电站人员信息包括姓名和 身高。 可选地,所述对进入变电站目标区域的人员进行身份识别,包括: 5 CN 111583334 A 说 明 书 2/9 页 对进入变电站目标区域的人员进行人脸识别,得到所述人员对应的姓名; 根据所述人员的姓名,从所述变电站人员信息库中查询所述人员的身高。 可选地,所述通过多个摄像头拍摄所述人员的站立状态下的影像,得到每个摄像 头对应的影像之前,还包括: 构建空间坐标系,所述空间坐标系的x轴为水平方向,y轴为竖直方向,z轴为纵深 方向; 根据所述空间坐标系,获取所述多个摄像头的位置信息,所述位置信息包括摄像 头的空间坐标、摄像头光轴与竖直方向的夹角和摄像头的上下视角。 可选地,所述计算所述人员的头顶距每个摄像头的距离的计算公式为: 其中,α为摄像头光轴与竖直方向的夹角,β为摄像头的上下视角,m为摄像头拍摄 影像上下方向的像素数量,n46为人像在影像上下方向所占的像素数量,n14为人像头顶距离 影像上边界所占的像素数量,h为人员的身高。 可选地,所述获取进入变电站目标区域的人员的身高之前,还包括: 检测每个摄像头的拍摄角度,将所述拍摄角度进行调整至预置角度。 本申请第二方面提供了一种变电站人员三维空间定位装置,包括: 获取模块,用于获取进入变电站目标区域的人员的身高; 影像拍摄模块,用于通过多个摄像头拍摄所述人员的站立状态下的影像,得到每 个摄像头对应的影像; 距离计算模块,用于根据每个影像中所述人员的人像所占的像素数量和对应的像 素位置、所述人员的身高、摄像头光轴与竖直方向的夹角和摄像头的上下视角,计算所述人 员的头顶距每个摄像头的距离; 位置求解模块,用于根据每个摄像头的空间坐标和每个摄像头距所述人员的头顶 的距离构建对应的距离数学模型,求解所述人员的头顶的空间坐标,得到所述人员的空间 位置。 可选地,所述获取模块具体用于: 对进入变电站目标区域的人员进行身份识别,从人员信息库中获取所述人员的人 员信息,得到所述人员的身高。 可选地,还包括: 采集模块,用于采集变电站人员信息,构建变电站人员信息库,所述变电站人员信 息包括姓名和身高。 可选的,所述采集模块具体包括: 人脸识别子模块,用于对进入变电站目标区域的人员进行人脸识别,得到所述人 员对应的姓名; 查询子模块,用于根据所述人员的姓名,从所述变电站人员信息库中查询所述人 员的身高。 6 CN 111583334 A 说 明 书 3/9 页 可选地,还包括:预处理模块; 所述预处理模块,用于: 构建空间坐标系,所述空间坐标系的x轴为水平方向,y轴为竖直方向,z轴为纵深 方向; 根据所述空间坐标系,获取所述多个摄像头的位置信息,所述位置信息包括摄像 头的空间坐标、摄像头光轴与竖直方向的夹角和摄像头的上下视角。 可选地,还包括: 调整模块,用于检测每个摄像头的拍摄角度,将所述拍摄角度进行调整至预置角 度。 可选地,所述计算所述人员的头顶距每个摄像头的距离的计算公式为: 其中,α为摄像头光轴与竖直方向的夹角,β为摄像头的上下视角,m为摄像头拍摄 影像上下方向的像素数量,n46为人像在影像上下方向所占的像素数量,n14为人像头顶距离 影像上边界所占的像素数量,h为人员的身高。 本申请第三方面提供了一种变电站人员三维空间定位设备,所述设备包括处理器 以及存储器: 所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器;所述处理 器用于根据所述程序代码中的指令执行第一方面任一种所述的变电站人员三维空间定位 方法。 从以上技术方案可以看出,本申请实施例具有以下优点: 本申请中提供了一种变电站人员三维空间定位方法,包括:获取进入变电站目标 区域的人员的身高;通过多个摄像头拍摄人员的站立状态下的影像,得到每个摄像头对应 的影像;根据每个影像中人员的人像所占的像素数量和对应的像素位置、人员的身高、摄像 头光轴与竖直方向的夹角和摄像头的上下视角,计算人员的头顶距每个摄像头的距离;根 据每个摄像头的空间坐标和每个摄像头距人员的头顶的距离构建对应的距离数学模型,求 解人员的头顶的空间坐标,得到人员的空间位置。 本申请提供的变电站人员三维空间定位方法,通过获得进入变电站目标区域的人 员的身高和通过多个摄像头拍摄该人员站立状态下的影像,根据各影像中人像的像素信 息,结合该人员的身高和摄像头信息,计算出该人员的头顶距每个摄像头的距离,再根据距 离数学模型求解出该人员头顶的空间坐标,从而得到该人员的空间位置,不需要进入变电 站目标区域的人员佩戴特定的定位设备即可实现对人员的空间定位,解决了现有的变电站 人员定位方式需要被定位人员携带特定定位设备,在被定位人员不携带或不开启定位设备 时,定位系统无法对被定位人员进行定位,使得对变电站作业人员的安全管理受到阻碍的 技术问题。 同时,申请提供的变电站人员三维空间定位方法可以直接利用变电站现有的监控 摄像头进行定位,不需要进入变电站目标区域的人员佩戴特定的定位设备,节省了配备定 7 CN 111583334 A 说 明 书 4/9 页 位设备带来的成本,从而降低了变电站作业人员安全管理的成本。 附图说明 为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请中记载的一些实施 例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。 图1为本申请实施例中提供的一种变电站人员三维空间定位方法的一个流程示意 图; 图2为本申请实施例中提供的摄像头与人员的位置示意图; 图3为本申请实施例中提供的摄像头拍摄的人员影像的示意图; 图4为本申请实施例中提供的一种变电站人员三维空间定位装置的一个结构示意 图; 图5为本申请实施例中提供的一种变电站人员三维空间定位设备的一个结构示意 图。











