
技术摘要:
本发明提供一种车辆。所述车辆具备:滑动门,其在关闭状态下堵塞被设置于车身上的开口,并且滑动移动的轨迹与被实施了转向的转向轮的轨迹重叠;转向机构,其使所述转向轮转向;驾驶控制部,其对所述转向机构进行控制而实施自动驾驶;转向角调节部,其在自动驾驶过程中 全部
背景技术:
在日本特开2018-180946号公报中,公开了一种朝向被设定的目的地而实施由自 动驾驶所实现的行驶的自动驾驶车辆。此外,在日本特开2007-038873号公报中公开了一种 车辆,该车辆具备:前轮转向角驱动单元,其在手动驾驶车辆中将前轮转向角设为可变;车 门状态调节单元,其在滑动门的开放时,以前轮转向角成为不与滑动门发生干涉的转向角 的方式而对前轮转向角驱动单元进行驱动控制。 在日本特开2018-180946号公报的这种自动驾驶车辆中,在滑动门和转向轮有可 能发生干涉的情况下,通过设置日本特开2007-038873号公报的各单元,从而消除了滑动门 与转向轮之间的干涉。但是,在该情况下,除了自动驾驶用的转向机构之外,还需要设置仅 在滑动门的开闭时进行工作的转向机构,从而会导致结构的复杂化或重量的增加。
技术实现要素:
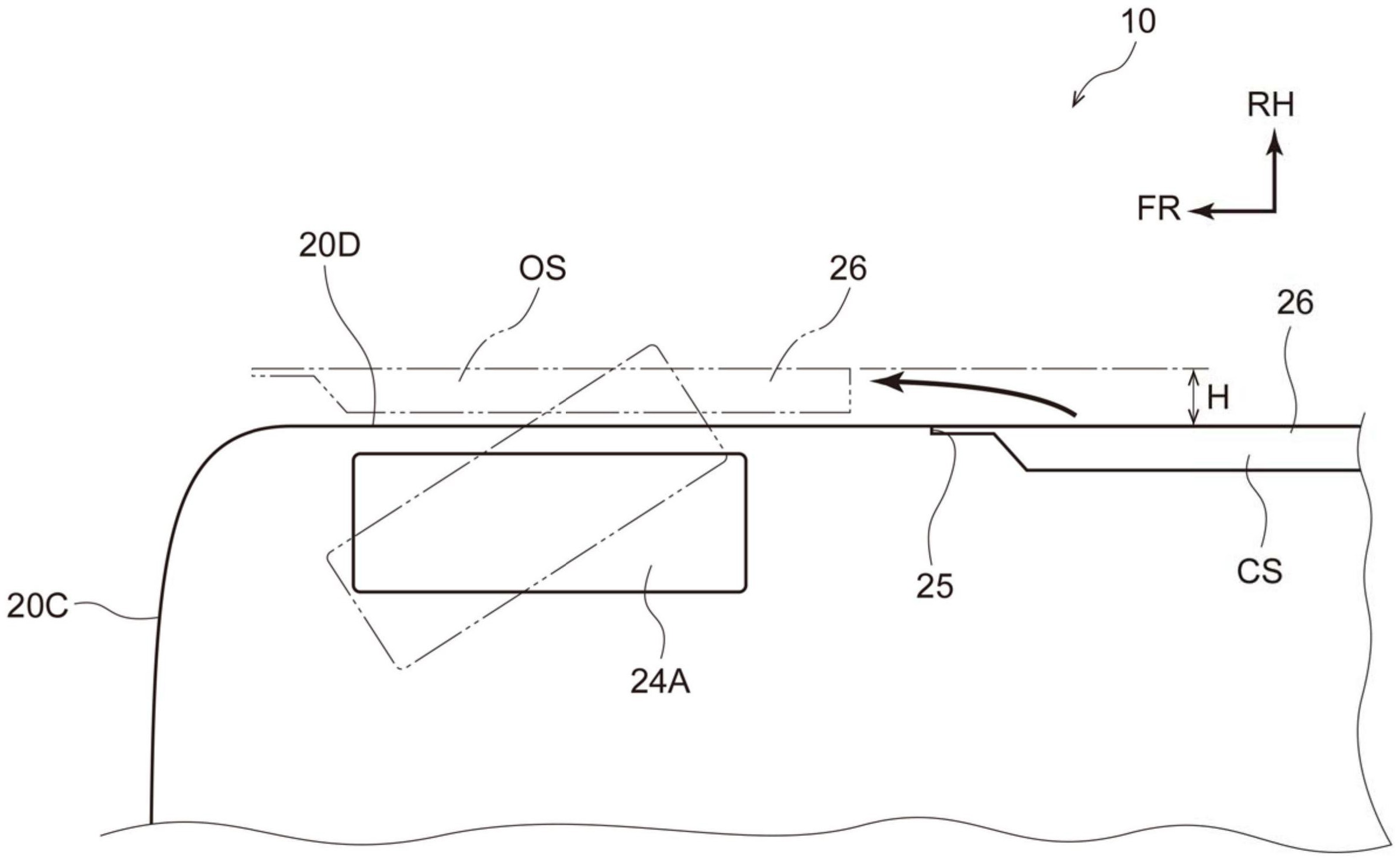
本公开内容的目的在于,提供一种能够在不追加转向所需的机构的条件下抑制滑 动门与转向轮之间的干涉的车辆。 第一方式的车辆具备:滑动门,其在关闭状态下堵塞被设置于车身上的开口,并且 滑动移动的轨迹与被实施了转向的转向轮的轨迹重叠;转向机构,其使所述转向轮转向;驾 驶控制部,其对所述转向机构进行控制而实施自动驾驶;转向角调节部,其在自动驾驶过程 中所述转向轮位于所述滑动门的轨迹上的情况下,在停车之前对所述转向机构进行控制, 从而以使所述转向轮从所述滑动门的轨迹上离开的方式而对所述转向轮的转向角进行调 节。 第一方式的车辆以具备在开放时可能与转向轮发生干涉的滑动门的情况为前提。 该车辆具有使转向轮转向的单一的转向机构,并通过驾驶控制部以及转向角调节部而对转 向机构进行控制,从而实现自动驾驶过程中的转向轮的转向、以及用于避免与滑动门之间 的干涉的转向轮的转向角调节的双方。根据该车辆,能够在转向机构之外不追加使转向轮 转向的机构的条件下,抑制滑动门与转向轮之间的干涉。 第二方式的车辆为,在第一方式的车辆中,在自动驾驶时所述车辆到达了从被设 定的目的地起的预定的范围内的情况下,所述转向角调节部对所述转向机构进行控制,从 而以使所述转向轮从所述滑动门的轨迹上离开的方式而对所述转向角进行调节。 在第二方式的车辆中,在乘员进行上下车的时刻对转向角进行调节,以使转向轮 与滑动门不发生干涉。即,根据该车辆,在乘员未进行上下车的临时停车时,转向轮不会被 调节至与滑动门不发生干涉的位置,从而可顺利地实施车辆的重新起动。 第三方式的车辆为,在第一方式或第二方式的车辆中,在所述车辆开始减速前,所 述转向角调节部对所述转向机构进行控制,从而以使所述转向轮从所述滑动门的轨迹上离 3 CN 111591116 A 说 明 书 2/9 页 开且朝向直进方向的方式而对所述转向角进行调节。 在第三方式的车辆中,在车辆减速的时间点上转向轮朝向直线方向。因此,根据该 车辆,能够实现减速时的车辆姿态的稳定化和被施加给乘员的横向加速度的减轻。 第四方式的车辆为,在第一方式至第三方式中的任意一个方式的车辆中,还具备 车门控制部,所述车门控制部在自动驾驶被限制的手动驾驶过程中,在所述转向轮位于所 述滑动门的轨迹上的情况下,使被开放的所述滑动门在与所述转向轮接触近前的半开状态 下停止。 根据第四方式的车辆,即使在采用由驾驶员所实施的操作被优先的手动驾驶的情 况下,也能够抑制滑动门与转向轮之间的干涉。 根据本公开内容,能够在不追加转向所需的机构的条件下抑制滑动门与转向轮之 间的干涉。 附图说明 本发明的一个示例性的实施例将根据以下附图进行详细描述,其中: 图1为实施方式所涉及的车辆,且为车厢的侧视图。 图2为实施方式所涉及的车辆,且为车厢的俯视图。 图3为表示实施方式所涉及的车辆的右前轮和关闭状态的滑动门的图2的放大图。 图4为表示实施方式所涉及的车辆的控制装置的硬件结构的框图。 图5为表示实施方式所涉及的车辆的控制装置中的CPU的功能结构的示例的框图。 图6为表示实施方式所涉及的车辆的右前轮和半开状态的滑动门的与图3相对应 的图。 图7为表示由车辆的控制装置所实施的干涉回避处理的流程的一个示例的流程 图。 图8为表示比较例所涉及的车辆的右前轮和开放状态的滑动门的与图3相对应的 图。











