
技术摘要:
本专利涉及一种基于蜗轮蜗杆的全向移动平台,由支撑机构、动力输出机构、动力传递系统和移动执行机构组成,支撑机构由:机架、四个锥齿轮轴中间支撑和支撑隔板组成;动力输出机构由:直流电源、四个轮毂电机和中间轴驱动电机组成;动力传递系统由:四个蜗轮、四个蜗轮 全部
背景技术:
随着社会的发展,越来越多的场合需要可控制的移动平台在狭小的空间内进行作 业。目前主要的移动平台的传动方案存在着转弯半径大、灵活性低等缺点,这使得移动平台 在狭小道路内不易转向,降低作业效率。为解决上述问题,提升移动平台的灵活性和作业效 率,本专利设计出一种可沿全向直线移动的平台。
技术实现要素:
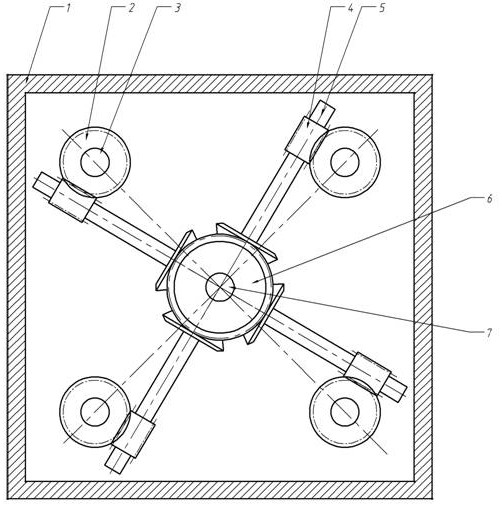
本专利提供一种可在狭小道路内灵活移动的平台,具有可全向直线移动、可反向 自锁、反应较为灵敏、灵活性高的优点。 为实现上述目的,本专利采用以下技术方案:本专利由支撑机构、动力输出机构、 动力传递系统和移动执行机构组成,支撑机构由:机架(1)、四个锥齿轮轴中间支撑(9)和支 撑隔板(10)组成;动力输出机构由:直流电源(11)、四个轮毂电机(13)和中间轴驱动电机 (15)组成;动力传递系统由:四个蜗轮(2)、四个蜗轮轴(3)、四个蜗杆(4)、四个锥齿轮轴 (5)、两个大锥齿轮(6)、中间轴(7)、十个轴承(8)和五个联轴器(12)组成;移动执行机构由: 四个万向轮(14)组成。 所述动力传动系统中蜗杆(4)安装在锥齿轮轴(5)上并与蜗轮相互啮合,设计时使 四个蜗杆(4)的旋向相同,并使蜗杆(4)导程角小于啮合轮齿间的当量摩擦角。 所述动力传递系统当移动平台需要转向时,中间轴驱动电机(15)带动中间轴(7) 上的两个大锥齿轮(6)同向旋转,两个带锥齿轮(6)各自带动两个锥齿轮轴(5)旋转,并通过 一级蜗轮蜗杆传动带动四个万向轮(14)同向同角度转动。 所述移动执行机构四个轮毂电机(13)安装在四个万向轮(14)的传动轴上,使每个 万向轮(14)独立驱动,且四个轮毂电机(13)采用同一型号,统一规格的电机,并由同一直流 电源(11)进行供电,保证四个轮毂电机(13)转速相同,进而使四个万向轮(14)转速相同。 附图说明 图1为本专利一种基于蜗轮蜗杆的全向移动平台的俯视全剖视图。 图2为本专利一种基于蜗轮蜗杆的全向移动平台的上蜗轮蜗杆传动机构全剖视 图。 图3为本专利一种基于蜗轮蜗杆的全向移动平台的下蜗轮蜗杆传动机构全剖视 图。 具体实施方案 本专利一种可全向移动的平台由支撑机构、动力输出机构、动力传递系统和移动 3 CN 111572659 A 说 明 书 2/2 页 执行机构组成,支撑机构中机架(1)支撑各轴承(8)、直流电源(11)和中间轴驱动电机(15), 四个锥齿轮轴中间支撑(9)支撑四个锥齿轮轴(5),支撑隔板(10)为四个锥齿轮轴中间支撑 (9)的装配基体;动力输出机构中四个轮毂电机(13)和中间轴驱动电机(15)均由直流电源 (11)提供动力。 如图1所示,动力由中间轴(7)传入到两个大锥齿轮(6)上,两个大锥齿轮(6)再各 带动两个锥齿轮轴(5)转动,锥齿轮轴(5)带动安装在其上的蜗杆(4)旋转进而带动蜗轮 (2),因转向动力由同一轴输入,故锥齿轮轴(5)旋转方向相同,设计时只要保证四个蜗杆 (4)旋向相同即可保证四个蜗轮轴(3)同方向同角度转动。 如图2、3所示,为保证转向动力输入均匀,故将四个锥齿轮轴(5)分为上下两层,每 层对角布置,由两个大锥齿轮(6)分别驱动。 如图2、3所示,蜗轮轴(3)底端均用联轴器(12)与万向轮(14)相连接,使蜗杆轴(3) 与万向轮转动轴同步转动,四个万向轮(14)内部均安装同一型号的轮毂电机(13),并由一 个直流电源(15)提供动力,保证四个万向轮(14)转速相等。 当移动平台不需要转向时,考虑到外界给万向轮的阻力来源于不同方向,故在设 计时令蜗杆(4)的导程角小于啮合轮齿间的当量摩擦角,使蜗轮蜗杆机构具有自锁性,可实 现反向自锁,即动力只能由蜗杆传向蜗轮,而不能由蜗轮传向蜗杆,从而外界阻力不会传入 移动平台内部,以此来保护内部结构,同时也保证其运动方向的稳定性。 当移动平台需要调整运动方向时,只需要驱动中间轴驱动电机(15)即可使四个万 向轮(14)同向转过同一角度。因四个万向轮(14)通过四个型号相同,并由同一电源驱动的 轮毂电机(13)带动,故四个万向轮同步沿倾斜直线运动,从而实现预期的运动方向。 当移动平台需要90度转向时,可原地使四个万向轮(14)转过90度后再使其直线行 走,从而实现狭小空间内的直角转向。 当移动平台需要180度转向时,可原地使四个万向轮(14)转过180度后再使其直线 行走,也可以通过调换中间轴驱动电机(15)正负极,直接使电机反转,从而达到180度转向 的目的。 本专利通过以上实施方案,可使移动平台通过全向直线运动代替转向运动,即不 需要转弯半径即可实现360度的转向,大大节省了道路的空间,使移动平台可更加灵活地在 狭小空间内移动。 4 CN 111572659 A 说 明 书 附 图 1/3 页 图1 5 CN 111572659 A 说 明 书 附 图 2/3 页 图2 6 CN 111572659 A 说 明 书 附 图 3/3 页 图3 7











