
技术摘要:
本发明涉及计算机交互控制技术领域,公开了脚势识别全向控制系统及其实现方法,控制系统包括支撑系统、跟踪定位系统、信息处理系统、终端实现系统;脚势识别全向控制的实现方法包括步骤:获取原点坐标系;用户入座,进行双脚的空间移动;跟踪定位系统实时获取双脚坐标 全部
背景技术:
VR能够使人身临其境地感受影视、游戏等内容,但因为缺乏良好的VR移动交互机 制,人们还难以在虚拟空间内自由活动,以及自然地与VR场景进行系统操作交互。比如,现 阶段方案用户只能坐着或站着,通过手柄来控制画面的移动,这将非常不符合人类用脚来 移动的习性,并且因为身体感受到的现实实际运动状态与视觉所感受到的运动状态不符, 会给用户带来严重的晕动症;另一种现有方案是让用户在有限的空间面积内行走来体验 VR,但用户只能在水平面方向上进行有限的活动,而不能真实体验向上或向下的立体运动, 并且始终有安全隐患,如会撞到墙壁、家具等风险;最后,即使像美国的Virtuix Omni、中国 的KAT Walk(公开号CN208426580U)等提供移动的方案也存在诸多问题,一是这种频繁使用 双脚滑动来移动将会使用户很容易疲劳,并出汗,这将大大限制用户的使用时长,另外该方 案也不能实现在立体空间上进行运动,只能在平面上进行行走。因此,有必要提供一种全新 的脚势识别全向控制方案。
技术实现要素:
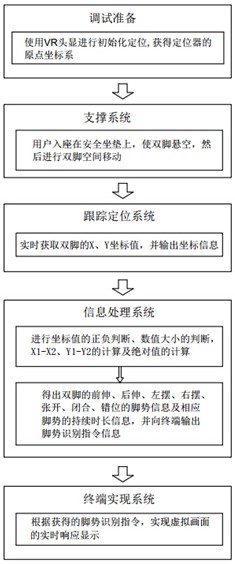
针对现有技术中的不足,本发明要解决的技术问题在于提供了脚势识别全向控制 系统,包括支撑系统,该全向控制系统还包括: 跟踪定位系统,用于实时获取用户双脚所处的空间位置信息; 信息处理系统,用于对跟踪定位系统获取的双脚实时位置信息进行收集、处理,并生成 脚势识别控制信息; 终端实现系统,用于接收信息处理系统的脚势识别控制信息,并实现终端设备的实时 响应。 进一步的,所述支撑系统用于用户的身体支撑,使用户的双脚悬空; 所述跟踪定位系统采用lighthouse定位技术和/或红外光学定位技术和/或可见光定 位技术对双脚进行位置追踪;其获取的双脚位置信息包括双脚的实时平面X、Y坐标; 所述信息处理系统包括单片机,其对双脚位置信息的处理包括双脚X、Y坐标的正负判 断、数值大小判断、绝对值的计算,左右脚X、Y坐标的差值计算及左右脚X、Y坐标差值的绝对 值计算; 所述终端实现系统包括但不限于VR头显终端。 本发明同时提供了脚势识别全向控制的实现方法,该实现方法包括如下步骤: S1:使用VR头显进行初始化定位,使VR头显及其他跟踪定位器获得原点坐标系; S2:用户入座在支撑系统上,使双脚悬空并稍微打开, 然后进行双脚的空间移动; S3:跟踪定位系统实时获取双脚的X、Y坐标值,并输出坐标信息; 3 CN 111580676 A 说 明 书 2/5 页 S4:单片机进行双脚X、Y坐标的正负判断、数值大小判断、绝对值的计算,左右脚X、Y坐 标的差值计算及左右脚X、Y坐标的差值绝对值计算; S5:单片机根据计算结果得出双脚的前伸、后伸、左摆、右摆、张开、闭合、错位的脚势信 息及相应脚势的持续时长信息,并向终端系统输出脚势识别控制指令信息; S6:VR终端设备接收脚势识别控制指令并实时响应显示相应的虚拟画面。 进一步的,所述VR终端设备显示的虚拟画面包括前后运动和/或左右运动和/或上 下升降和/或左右旋转的虚拟画面。 相对于现有技术,本发明的有益效果是: (1)体验更自由:现有技术方案主要的缺陷是难以进行立体空间上的自由移动,只能在 平面上进行行走,而本发明将有助于让用户实现全向性的立体空间运动,因而用户体验会 更自由。 (2)更符合人类习性:现有技术方案主要是用手柄来控制移动,而用手来控制移动 行为不符合人类的生活习惯,因为在现实世界中我们本来就是通过脚来进行移动的,因此, 本发明通过用脚来控制移动更符合人类的习性。 (3)更轻松:本发明的脚势识别不需要太大的摆动就可以控制方向,因而人们可以 非常轻松地在虚拟空间内进行移动,体力的消耗非常低。 (4)成本低:现有技术方案中跑步机形式的运动控制器,需要数量众多的传感器及 需要购买特定的结构设备,这会加大用户的使用成本;而本发明的控制系统只需要坐在可 以让双脚悬空的椅子上即可,理论上家里的椅子也可以拿来直接使用,因而使用场景及设 施很容易获得,占地面积也相对较小。 (5)安全性高:本发明只需要稍微摆动双脚即可控制虚拟空间的移动,因此,使用 本发明的控制方案用户不用担心在虚拟空间中的过度移动会在现实中产生意外,比如现有 方案就可能会因为过度移动而撞到墙、家具等,用户在使用时将会更放松,心理压力会大大 缓解。 (6)降低晕动症:用户的晕动症很大一部分原因是因为虚拟的运动体验和身体感 受到的实际运动状况不一样而导致,而我们身体感受现实中的实际运动状况信息主要来源 于脚上神经系统的反馈,但是本发明坐在悬空的椅子会让双脚离地,因此可以减少用户感 知身体在现实中的真实运动状态,使它减少与视觉上的冲突,从而降低晕动症。 附图说明 图1为本发明脚势识别全向控制系统的结构及实现方法示意图; 图2为本发明一种优选实施例中脚势识别全向控制系统的结构示意图; 图3为本发明一种优选实施例中双脚移动坐标示意图。











