
技术摘要:
本发明属于智能化农业技术领域,公开了一种农药喷洒智能农机寻路导航控制方法及系统,设定作业任务,选择工作模式,并决定作业任务的开始与结束;利用GPS导航与载波相位差分技术即RTK进行农机精准导航定位,获取农机的导航定位信息;利用车载控制器获取执行器状态、农 全部
背景技术:
应用现代信息技术提高农机装备的智能化水平,是实施我国智慧农业、实现农机 农艺融合、提高农 业发展质量和效益的重要手段。近年来,我国各地围绕物联网、大数据、 智能控制、卫星导航定位在农机 装备和农机作业上的应用进行了有益探索,在大田精准作 业、设施农业智慧管理等方面涌现出很多成功案 例。 无人驾驶技术集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,是 计算机科学、模 式识别和智能控制技术高度发展的产物,也是衡量一个国家科研实力和工 业水平的一个重要标志,在国防 和国民经济领域具有广阔的应用前景。 目前我国农机技术水平整体落后,虽然现有技术中有将无人驾驶以及导航技术应 用于农业农机设备 上,但无法实现自动规划路径,且控制精度误差大,无法实现自动转向。 综上所述,现有技术存在的问题是:(1)现有农机导航以及自动驾驶技术无法实现 自动规划路径, 且控制精度误差大,无法实现自动转向。 (2)现有农机的自动驾驶多局限于直线路径的覆盖。
技术实现要素:
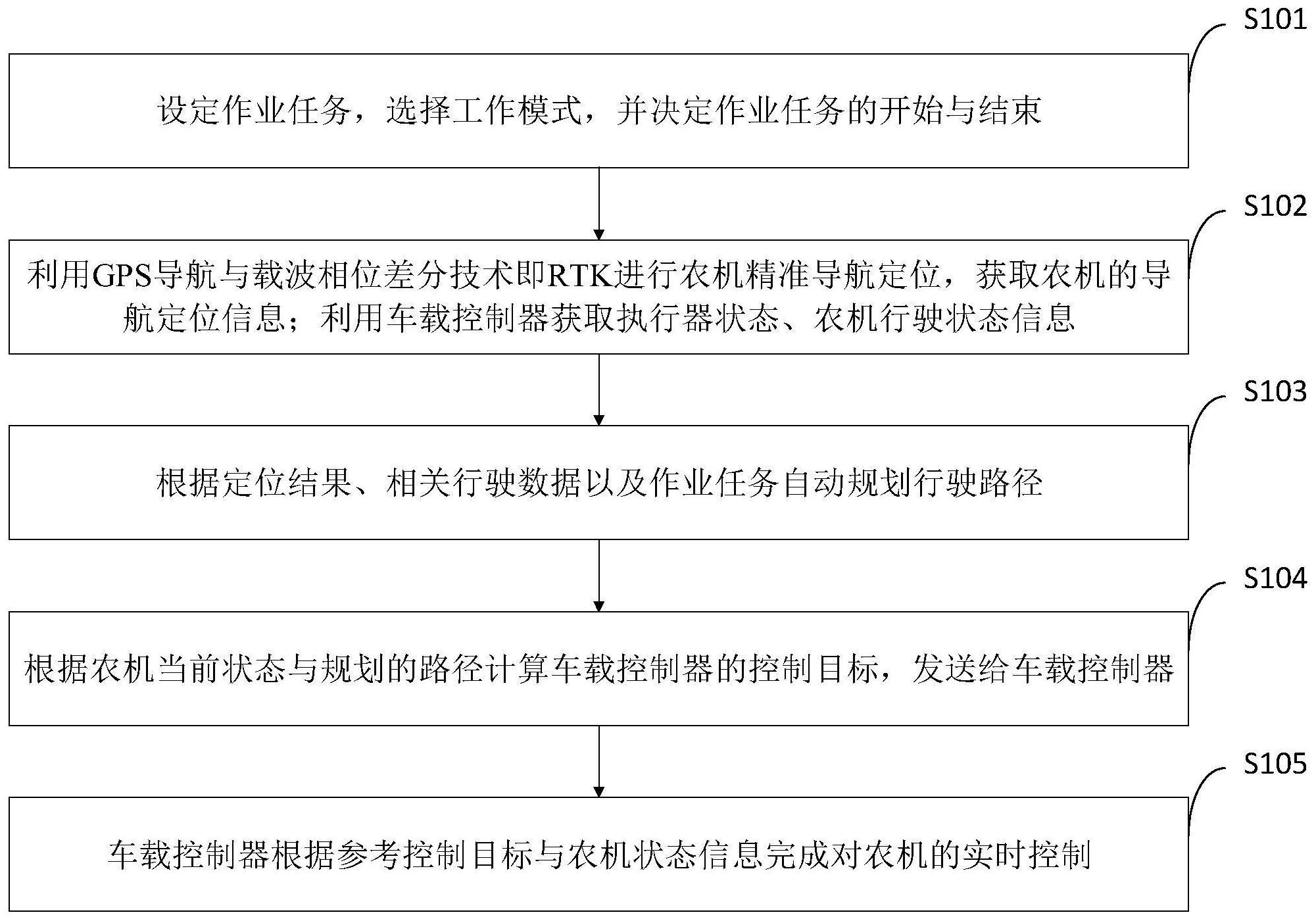
针对现有技术存在的问题,本发明提供了一种农药喷洒智能农机寻路导航控制方 法及系统。 本发明是这样实现的,一种农药喷洒智能农机寻路导航控制方法,所述农药喷洒 智能农机寻路导航控 制方法包括: 步骤一,设定作业任务,选择工作模式,并决定作业任务的开始与结束; 步骤二,利用GPS导航与载波相位差分技术即RTK进行农机精准导航定位,获取农 机的导航定位信 息;利用车载控制器获取执行器状态、农机行驶状态信息; 步骤三,根据定位结果、相关行驶数据以及作业任务自动规划行驶路径; 步骤四,根据农机当前状态与规划的路径计算车载控制器的控制目标,发送给车 载控制器; 步骤五,车载控制器根据参考控制目标与农机状态信息完成对农机的实时控制。 进一步,步骤二中,所述农机导航定位信息包括但不限于农机位置的经纬度、UTC 时间、地面速率、 地面航向、滚转角、俯仰角、定位精度。 进一步,步骤二中,所述农机精准导航定位方法包括: 对BDS信息的接收并通过卡尔曼滤波算法对经纬度信息进行滤波处理、视觉传感 器数据的采集处理 以及对两者的接收数据进行融合处理;通过BDS接收机和其他传感器接 5 CN 111596652 A 说 明 书 2/23 页 收到的位置以及姿态信息数据, 在屏幕上显示出地块边界,根据地块情况、作业要求等规 划出合理的作业路径;当农机作业时,通过BDS 和多传感器的动态跟踪数据实时显示作业 情况,通过导航技术实现农机车载的自动导航。 进一步,步骤三中,所述路径规划方法包括: 对农田环境进行栅格法建模,然后采用直线-圆弧作业路径算法对农田子区域进 行路径规划; (1)采用栅格法建立农田环境模型: 首先,利用网格表示农田区域,网格内没有障碍物的称为无障碍栅格,网格内存在 障碍物的称为障碍 物栅格,根据农机的运动状态来确定每个单位栅格的大小;通过RTK- GPS获得农田中信标节点的位置信 息;通过安装在农田地角和边界的信标节点的位置坐标 确定农田的基本形状,再根据农田中障碍物与农田 地角和边界的相对位置确定出障碍物 在农田平面坐标系中的位置坐标;得到农田栅格地图; 其次,利用直角坐标法和序号法两种方法表示农田栅格地图中的每个栅格; 所述直角坐标法:每行和每列的栅格数均为40,农田由40×40的栅格组成栅格矩 阵,每个栅格由 其中心点坐标表示; 所述序号法:对所有栅格从左到右,从下到上进行十进制编号。 所述栅格的直角坐标编码和序号编码之间一一对应; (2)解析直线-圆弧作业路径:选用三段圆弧作为d≤2r的情况的转弯路径;所述三 段圆弧的转弯 路径,由三段圆弧平滑连接而成,三段圆弧的半径与圆心相同; (3)规划直线-圆弧作业路径:运用直线与圆弧线结合生成农机作业的目标路径; 根据用户输入的作业起止点位置、作业幅宽、作业路径长度与方向相关信息生成 目标路径; 获得农机最小转弯半径与作业幅宽信息,根据其大小关系选择转弯路径的生成策 略: 作业幅宽即农机作业过程相邻两条直线路径的间距,在作业幅宽小于转弯直径的 情况下,农机按照三 段圆弧路径转弯,此时农机需要首先向下一条作业直线的相反方向调 整,再转弯,按照此转弯策略完成的 农机作业路径; 如果作业幅宽大于转弯之间,则无需此调整,农机按照弓形路径转弯,按照此转弯 策略完成的农机作 业路径。 进一步,所述农药喷洒智能农机寻路导航控制方法还包括: 所述农机自动驾驶由内置的定时器启动,在每个定时中断内,根据需求与当前农 机状态选择执行路径 规划或者实时跟踪; 在任务开始时或在完成已规划路径的情况下,会根据需要进行路径规划,否则农 机执行实时跟踪的控 制程序; 执行路径规划时,根据农机当前的位置、速度、行驶方向相关信息以及目标路径的 信息为农机规划进 入目标路径的最优路线; 执行实时控制时,根据农机的行驶偏差,根据规划的自动行驶路径与农机当前的 行驶状态实时计算出 农机的目标转向角、速度相关控制参考量,作为车载控制系输入,控 制农机的方向盘转角,中止自动驾驶 时,取消定时器。 6 CN 111596652 A 说 明 书 3/23 页 进一步,所述农机路径规划与实时跟踪方法包括: 通过构建农机动力学模型建立路径的约束条件与目标函数,建立跟踪控制方法实 现农机路径规划与实 时跟踪; 所述农机动力学模型建立农机的行驶方向、位置、速度、姿态角相关农机状态信息 与作为控制输入的 农机前轮转角之间的关系; 所述农机动力学模型包括直线跟踪过程的动力学模型与转弯过程的动力学模型; 所述直线跟踪过程的动力学模型为: 所述转弯过程的动力学模型包括: 本发明的另一目的在于提供一种实施所述农药喷洒智能农机寻路导航控制方法 的农药喷洒智能农机 寻路导航控制系统,所述农药喷洒智能农机寻路导航控制系统包括: 车载传感器模块:用于收集农机行驶状态数据; 通信模块:用于将相关行驶数据传输至自动驾驶与管理模块以及车载管理模块; 导航模块:包括工控机单元、GPS导航单元、视觉导航单元,用于利用GPS导航与载 波相位差分技 术即RTK进行精准导航定位,获取相关导航数据; 自动驾驶与管理模块:用于根据定位结果以及相关行驶数据通过改造的电机或电 液执行器实现农机的 路径规划、实时控制、精量喷洒;并计算车载控制器的控制目标; 车载控制模块:用于利用车载控制器基于行驶数据、相关规划路径以及控制目标 控制农机执行机构按 照规划路径行驶,实现农机自动导航与行驶控制; 农机执行机构:用于采用电液比例换向阀驱动农机转向油缸动作的电液式转向执 行机构。 进一步,所述导航模块包括: 所述导航模块包括工控机单元、GPS导航单元、视觉导航单元; 所述工控机单元由嵌入式设备、嵌入式系统、键盘、LCD组成; 所述GPS导航单元由GPS接收装置以及配套天线组成; 视觉导航单元由摄像头和图像处理模块组成。 进一步,所述农机执行机构包括: 所述农机执行机构包括液压控制器、三位四通电磁比例换向阀、三位四通换向阀, 溢流阀、切换阀、 液压油管、安全阀以及两个平衡阀; 其中,液压泵为动力元件,用于将机械能转化为液压能; 液压缸及马达为执行元件,用于将液压能转化为机械能; 三位四通电磁比例换向阀:用于实现液压油的流量控制和农机的转向控制; 三位四通换向阀,溢流阀、切换阀,用于控制液压油的压力、方向以及流量; 安全阀:用于控制液压回路的油压力; 7 CN 111596652 A 说 明 书 4/23 页 平衡阀:用于保证液压回路的压力; 液压箱、过滤器、管路为辅助元件、液压油为工作介质。 本发明的另一目的在于提供一种实现所述农药喷洒智能农机寻路导航控制方法 的信息数据处理终端。 本发明的另一目的在于提供一种计算机可读存储介质,包括指令,当其在计算机 上运行时,使得计算 机执行所述的农药喷洒智能农机寻路导航控制方法。 综上所述,本发明的优点及积极效果为:本发明可以方便地监控、管理和操作智能 农机,使用难度低, 易于普及,成本低廉,安装简单。 本发明能够实现农机田间作业的自动导航与行驶控制,智能农机的自动驾驶系统 主要包含工控机上位 机与车载控制器,根据导航系统与车载传感器发送的信息完成农机 的路径规划、实时控制、精量喷洒等任 务,并通过改造的电机/电液执行器实现。 本发明在直线路径之外也会对转弯、进入作业区域的非直线路径进行规划。 本发明能够实现无人驾驶和农药自动喷洒,可24小时不停作业,减低了农民的劳 动强度和农药喷洒 过程中对人体伤害。 本发明通过差分算法,实现5km/h的时速下路径跟踪精度达2cm内,定位精度高、对 作物的损害小。 本发明通过手动/自动自由切换、远程遥控紧急自动及多传感器融合技术,保证了 车辆和人身的安全。 附图说明 图1是本发明实施例提供的农药喷洒智能农机寻路导航控制方法流程图。 图2是本发明实施例提供的自动驾驶方法流程图。 图3是本发明实施例提供的农机自动驾驶控制方法流程图。 图4是本发明实施例提供的农药喷洒智能农机寻路导航控制系统结构示意图。 图中:1、车载传感器模块;2、通信模块;3、导航模块;4、自动驾驶与管理模块;5、车 载控制模 块;6、农机执行机构。 图5是本发明实施例提供的智能化导航与控制系统总体结构示意图。 图6是本发明实施例提供的智能喷药机自动驾驶系统总体结构示意图。 图7是本发明实施例提供的智能喷药机运动学模型示意图。 图8是本发明实施例提供的智能喷药机的动力学模型示意图。 图9是本发明实施例提供的车辆的阿克曼转向机构示意图。 图10是本发明实施例提供的车辆横向力与滑移角的关系示意图。 图11是本发明实施例提供的导航系统结构框图。 图12是本发明实施例提供的基于GPS定位的农机车载组合导航系统的硬件集成结 构示意图。 图13是本发明实施例提供的GPS导航系统组成示意图。 图14是本发明实施例提供的电台工作图。 图15是本发明实施例提供的大地坐标系示意图。 图16是本发明实施例提供的空间直角坐标系示意图。 8 CN 111596652 A 说 明 书 5/23 页 图17是本发明实施例提供的农田网格区域划分示意图。 图18是本发明实施例提供的常见农机作业路径示意图。 图19是本发明实施例提供的AB线作业路径示意图。 图20是本发明实施例提供的一种弓形路径示意图。 图21是本发明实施例提供的鱼尾型转弯路径示意图。 图22是本发明实施例提供的作业幅宽小于转弯直径时的目标路径示意图。 图23是本发明实施例提供的作业幅宽大于转弯直径时的目标路径示意图。 图24是本发明实施例提供的电控液压动力系统油路图。 图中:1、油箱;2、恒流溢流阀;3、电磁换向阀;4、全液压转向器;5、方向盘;6、步进 电动机; 7、转向油缸。 图25是本发明实施例提供的总体转向系统总体结构框图。 图26是本发明实施例提供的二自由度自动驾驶农机航向跟踪模型示意图。 图27是本发明实施例提供的航向跟踪控制框图。 图28是本发明实施例提供的航向跟踪控制仿真图。 图29是本发明实施例提供的无航向预估的航向阶跃跟踪仿真示意图。 图30是本发明实施例提供的有航向预估的航向阶跃跟踪仿真示意图。 图31是本发明实施例提供的航向跟踪前轮转角仿真示意图。 图32是本发明实施例提供的智能农机实验控制系统总体结构示意图。 图33是本发明实施例提供的跟踪路径对比示意图。 图34是本发明实施例提供的X轴跟踪误差示意图。 图35是本发明实施例提供的Y轴跟踪误差示意图。











