
技术摘要:
本发明公开了提高单极板数字微流控芯片液滴驱动效率的方法及其应用,属于数字微流控芯片技术领域,本发明通过对单极板数字微流控芯片上液滴操控的分析,建立数学模型,实现对液滴操控效率的提升。其主要原理是分析插指型电极诱导的电润湿力,以及由此引起的液滴发生形 全部
背景技术:
数字微流控芯片是一种在特殊制备的衬底上,利用介电润湿原理操控液滴的技 术。在数字微流控芯片上能实现液滴的产生、转移、混合与劈裂,通过对不同化学的成分液 滴进行操控,结合光学、电化学、免疫反应等技术,能实现通用的生化分析平台的构建。数字 微流控芯片主要有双极板和单极板两种配置。其中,单极板数字微流控芯片是一种开放式 的液滴操控形式。在单极板数字微流控芯片中,驱动电极和零电极集成在同一个衬底上。由 于介电润湿而导致的液滴动力学机理尚不清楚。单极板数字微流控芯片面临着液滴操控不 够稳定,内在动力机理缺乏量化分析的问题。这些问题一方面存在液滴操控失败的风险,另 一方面不利于最大限度的发挥液滴的操控效率,亟待进一步研究,解决。
技术实现要素:
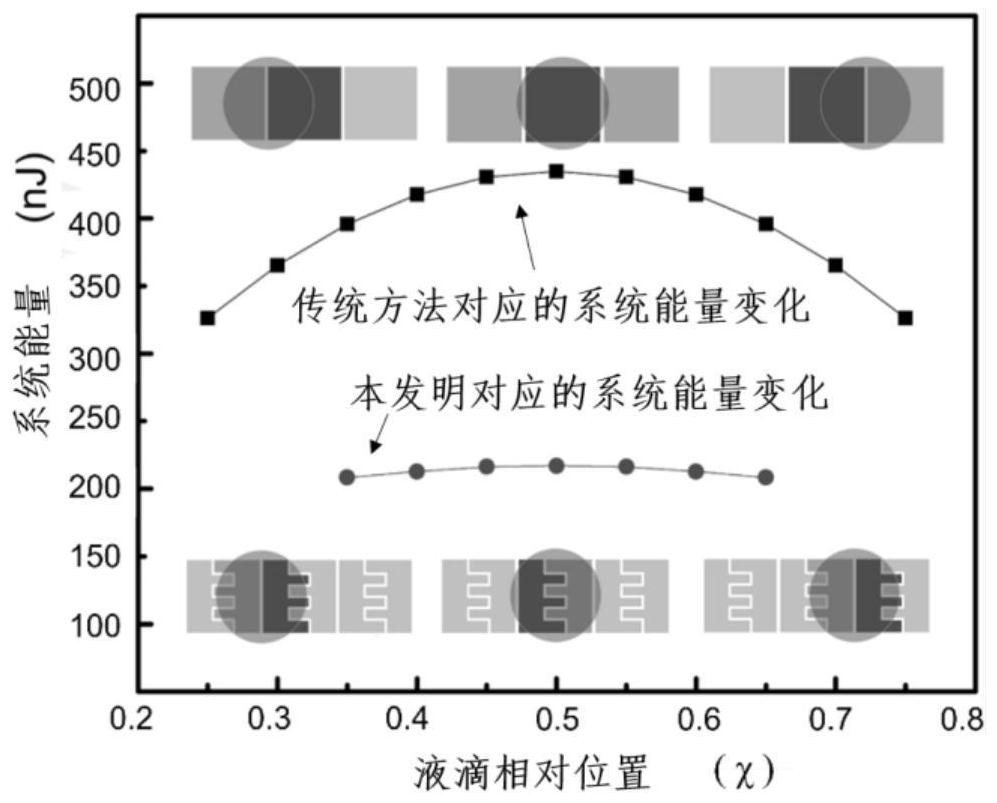
针对现有技术的不足,本发明要解决的技术问题是:提供一种提高单极板数字微 流控芯片液滴驱动效率的方法,进而实现单极板数字微流控芯片上液滴的稳定操控。本发 明通过对单极板数字微流控芯片上液滴操控的分析,建立数学模型,实现对液滴操控效率 的提升。通过建模分析,设计了插值型驱动电极,实现液滴驱动性能的提升和液滴的稳定操 控。其主要原理是分析插指型电极诱导的电润湿力,以及由此引起的液滴发生形变而产生 的拉普拉斯力,并建立计算拉普拉斯压力差的数学模型,最后获得提升液滴驱动效率的实 验参数。 本发明通过如下技术方案实现: 一种提高单极板数字微流控芯片液滴驱动效率的方法,具体步骤如下: (1)、器件设置初始化,包括选定电极形状与尺寸,确定介电层厚度及液滴接触角 变化范围Δθ: 具体地,所述液滴接触角变化范围Δθ=θA-θB,其中,采用插指型电极阵列作为驱 动电极阵列,θB、θA满足杨-李普曼方程cos θB=cos θA εεV20 r /2dγlg,θA和θB分别为外界电 压V施加前后液滴的接触角,ε0和εr分别是真空和介电层材料的介电常数,d是介电层的厚 度;未施加外界电压前,液滴被置于单极板数字微流控芯片的疏水衬底上时,其接触角θA满 足杨氏方程cos θA=(γsg–γsl)/γlg,其中,γsg、γsl、γlg分别为气固界面张力、固液界面 张力及气液界面张力; (2)液滴动力模型建立与实验参数获取: 具体步骤为:当在一组电极单元上施加电压时,液滴由于电润湿,接触角减小,此 时液滴左右两边接触角不相等,即液滴内部产生拉普拉斯压力差,因此,建立计算液滴驱动 力Fact的公式,即: 4 CN 111581896 A 说 明 书 2/7 页 Fact=ΔPA·SA·cos βA–ΔPB·SB·cos βB 其中,ΔPA和ΔPB分别是液滴左右两侧由于变形不一致而产生的界面拉普拉斯力, SA和SB分别是液滴左右两侧球面的截面面积,βA和βB分别是ΔPA和ΔPB与水平方向所成的夹 角; 液滴在器件上所受的粘滞阻力Fh可根据如下公式计算,即: Fh=3γlg·Rb·(cos θB–cos θA) 其中,γlg·是气液界面张力;Rb表示固液界面形成的基圆半径;θB和θA是液滴左右 两侧的接触角; 进而,根据动力学规律ΣF=Fact–Fh=m·a, 其中,m为液滴质量,a是液滴在接触角变化时产生的加速度; 结合电极的尺寸参数L=2at2,可计算出液滴在两个相邻插指型电极上运动所需 要时间t;根据计算得出的液滴运动所需要的时间,通过编程,可控制电极上施加电压的时 间间隔;通过选择参数,利用上述数学模型迭代,还能优化最佳的器件性能,实现液滴驱动 力的最大化; (3)、利用单极板数字微流控芯片操控液滴的方法; 具体步骤为:利用步骤(1)中的分析方法,完成器件设置的初始化,利用步骤(2)的 计算方法求出的时间参数,编程输入控制器。 进一步地,步骤(1)所述的器件设置初始化,包括所选定的方形的插指型电极单元 的边长尺寸为1-4mm,设定单极板数字微流控芯片的金属层材料为氧化铟锡,其厚度为150- 300nm,介电层材料为三氧化二铝,其厚度为80-150nm,疏水层材料为特氟龙,厚度为100nm。 通过计算,获取液滴在该方块儿单元上接触角随电压增大的变化曲线,由于介电润湿存在 接触角饱和,因此理论计算要结合实验测试,最终得出液滴最大接触角的变化范围Δθ为 0°-40°。 进一步地,步骤(2)所述的计算液滴拉普拉斯压力差公式中的ΔPA和ΔPB,SA和SB 以及βA和βB通过液滴润湿的数学模型导出;当体积为V0的液滴置于固体疏水衬底上时,液滴 接触角为θ,液滴可以视为球体Σ(x2 y2 z2=R2)被平面x2 (y-h)2=b2截取后剩下的部分; 液滴体积V0则写成: 进而得出此时液滴所对应球的半径R, 进而得出此时,根据三角关系即可得出固液界面接触基圆的半径b和弦高h b=Rsin(π-θ) h=Rcos(π-θ) 根据矢量关系,可知拉普拉斯压力差沿水平方向的夹角β满足: 5 CN 111581896 A 说 明 书 3/7 页 其中,θA和θB表示液滴发生形变时左右接触角;R1和R2是液滴变形时左右边对应半 球的半径,h1和h2对应其弦高; 液滴左右两侧拉普拉斯压力所对应的截面面积: 对于半径为r的球形液滴,界面处的拉普拉斯压力ΔP=2γlg/r,在液滴变形时其 左右对应的拉普拉斯压力分别为: 其中,γlg为液滴与空气之间的界面张力,即水的表面张力72mN/m。 进一步地,步骤(2)所述的液滴驱动力Fact的范围为100-150μN,液滴在最大变形时 的加速度为30-70mm/s2,液滴在方形的插指型电极单元上运动所需要的时间为0.1-1.5s。 进一步地,步骤(2)所述的电压施加方式为正负电压依次交替施加,且电压为交流 电压,电压范围是50-200V。 本发明还提供了提高单极板数字微流控芯片液滴驱动效率的方法在液滴操控与 货物运输方面的应用。 与现有技术相比,本发明具有以下优点: (1)、通过建模分析液滴的动力学过程,不仅能精确分析液滴运动过程,更好的优 化设计芯片中的电极结构,还能获得相邻电极之间的施加电压的时间间隔,这与传统做实 验测试的方法相比,不仅提升液滴的驱动效率,还实现了液滴操控步骤的简化; (2)利用插指型电极作为液滴的驱动电极,降低了液滴的驱动电压,实现了单极板 数字微流控芯片上液滴的稳定操控,这为单极板数字微流控芯片的实用化奠定基础。 附图说明 图1为本发明的一种提升单极板数字微流控芯片液滴驱动效率的方法的液滴受力 分析的示意图; 其中:(a)液滴静态平衡时表面张力分布、(b)液滴变形时产生拉布拉斯压力差、 (c)和(d)液滴数学模型示意图; 图2为本发明的一种提升单极板数字微流控芯片液滴驱动效率的方法的系统能量 与传统方式芯片的系统能量对比图; 图3为本发明的插指型电极单元结构示意图; 图4为本发明的单极板数字微流控芯片的截面图(多层); 图5为本发明的单极板数字微流控芯片的实物图; 6 CN 111581896 A 说 明 书 4/7 页 图6为本发明的单极板数字微流控芯片的扫描电镜局部放大图; 图7为本发明的单极板数字微流控芯片的系统原理图; 图8为本发明的一种提升单极板数字微流控芯片液滴驱动效率的方法用于稳定的 液滴操控的过程图; 其中,(1)─(12)代表液滴在不同时刻时所在的位置,每步运动的时间即为所计算 得出的时间间隔。 图9为本发明的一种提升单极板数字微流控芯片液滴驱动效率的方法用于液滴货 物输运的过程图; 其中,(1)─(10)代表液滴与聚对苯二甲酸乙二醇酯小球在不同时刻时,所在的位 置,每步运动的时间即为所计算得出的时间间隔。











