
技术摘要:
本发明提出一种开盒装置、包装机以及计算机可读介质。该开盒装置,用于打开盒胚,该盒胚包括板体和两个盖板,两个所述盖板之间设有间隙,包括可抓取盒胚的取料单元,与所述取料单元连接以驱动盒胚按预设路径移动的第一驱动单元,以及设于该预设路径上的限位件,以使所 全部
背景技术:
目前,由于市场需求的不断变化及提高,礼品盒的市场化需求越来越大,礼品盒的 市场价也比普通包装的产品要高出较大的数额,因此大大小小的食品企业近期都有着较大 程度的争相投入来拓展礼品盒产品的开发,现有的生产礼品盒多为盒胚运输,然后在包装 厂将盒胚打开后再进行装盒和封盒,目前常用的开盒方式多为充气吹开,或者通过相对设 置的吸盘来相对移动以打开盒胚,或使用可旋转的夹爪等结构将盒胚打开,但上述开盒机 构结构复杂,且开盒成功率还无法有效保证。
技术实现要素:
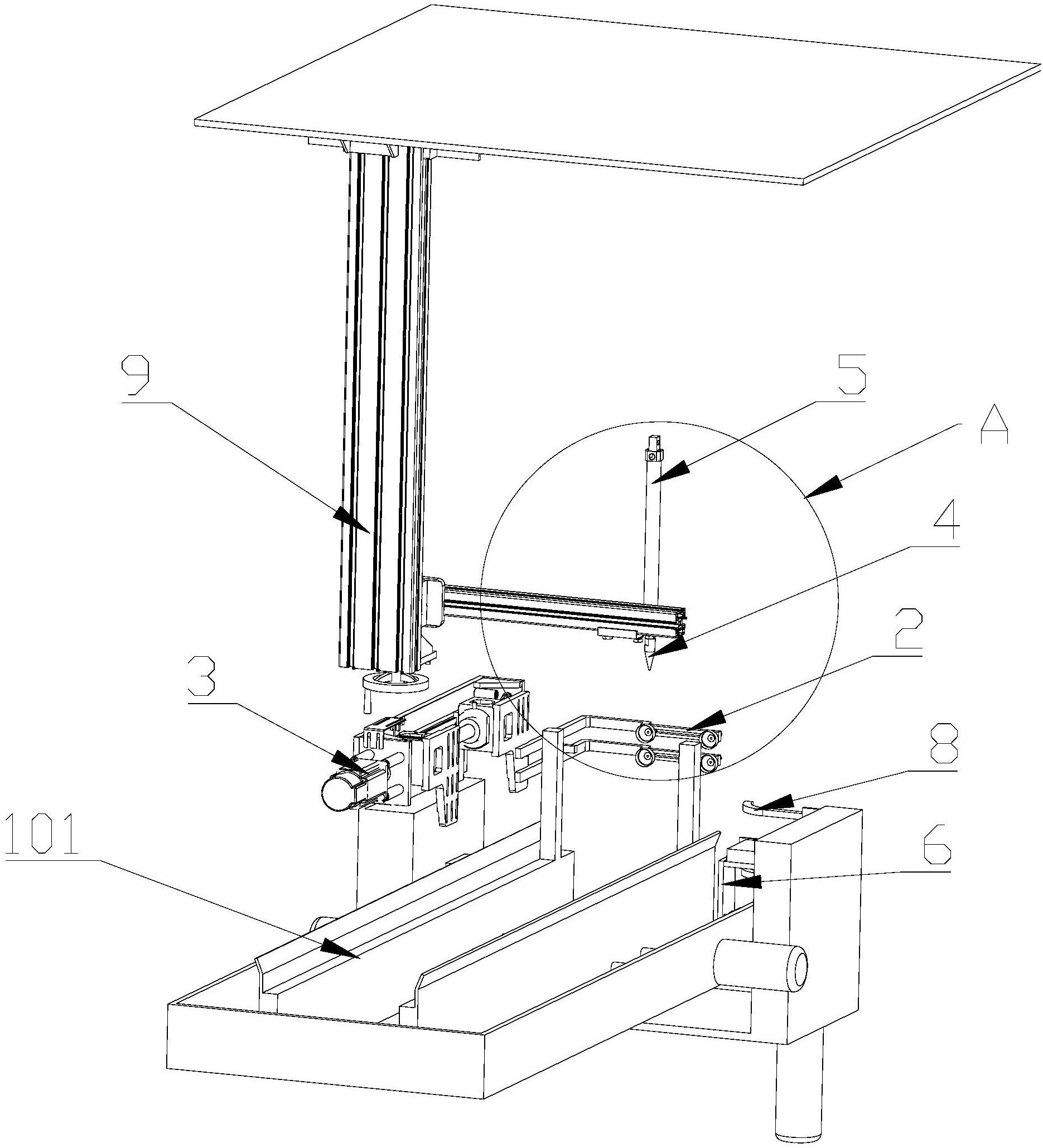
本发明针对上述的开盒机构结构复杂的技术问题,提出一种结构简单的开盒装 置、包装机以及计算机可读介质。 为了达到上述目的,本发明采用的技术方案为: 一种开盒装置,用于打开盒胚,该盒胚包括板体和两个盖板,两个所述盖板之间设 有间隙,包括可抓取盒胚的取料单元,与所述取料单元连接以驱动盒胚按预设路径移动的 第一驱动单元,以及设于该预设路径上的限位件,以使所述限位件插入至所述间隙中。 作为优选,还包括与所述限位件连接的第二驱动单元,以使所述限位件向远离盒 胚的方向移动。 作为优选,所述第二驱动单元为气缸。 作为优选,还包括设于所述间隙远离所述取料单元一侧的第一移动件,以及与所 述第一移动件连接以驱动所述第一移动件向靠近所述取料单元方向移动的第三驱动单元。 作为优选,还包括设于所述间隙远离所述取料单元一侧的弧形的导向件。 作为优选,所述导向件设于所述第一移动件与所述取料单元之间。 作为优选,还包括机架,以及设于所述机架上的第四驱动件,所述第四驱动件与所 述限位件连接以驱动所述限位件沿所述机架移动。 作为优选,所述第四驱动件包括丝杠,以及与所述丝杠连接的手摇轮。 一种包装机,包括如上任一项中所述的开盒装置。 一种计算机可读介质,可与如上任一项中所述的开盒装置连接,包括预设程序,该 预设程序被执行时能够实现以下步骤:第一驱动单元驱动取料单元抓取盒胚并按预设路径 移动,以使限位件插入间隙内,第一驱动单元继续驱动取料单元按预设路径移动。 与现有技术相比,本发明的优点和积极效果在于: 本发明所述的开盒装置,通过第一驱动单元驱动取料单元抓取盒胚并按照预设路 径移动,并将限位件设置在预设路径上,以使限位件插入间隙中,此时,取料单元继续驱动 盒胚按预设路径移动,限位件限制板体的位移,从而使盒胚初步打开,结构简单且开盒成功 3 CN 111605803 A 说 明 书 2/4 页 率高;通过第二驱动单元的设置,可以控制限位件在盒胚初步打开后向远离盒胚的方向移 动,可以防止限位件将盒胚划伤,以避免盒胚的损坏;因仅需要一段位移,第二驱动单元选 用气缸,结构简单、重量轻且易于控制;通过第一移动件和第三驱动单元的设置,在盒胚初 步打开后,第三驱动单元控制第一移动件推动盒胚进行进一步的打开,从而实现盒胚的完 全打开;通过导向件的设置,从而实现盒胚完全打开后的定位,且可以防止过度打开;通过 第四驱动件驱动限位件沿机架移动,有效的适应限位件与盒胚之间的相对距离,从而可以 适应不同尺寸的盒胚。 本发明所述的包装机,包括上述开盒装置,通过第一驱动单元驱动取料单元抓取 盒胚并按照预设路径移动,并将限位件设置在预设路径上,以使限位件插入间隙中,此时, 取料单元继续驱动盒胚按预设路径移动,限位件限制板体的位移,从而使盒胚初步打开,结 构简单且开盒成功率高。 本发明所述的计算机可读介质,可与上述开盒装置连接,包括预设程序,该预设程 序被执行时的步骤,通过第一驱动单元驱动取料单元抓取盒胚并按照预设路径移动,并将 限位件设置在预设路径上,以使限位件插入间隙中,此时,取料单元继续驱动盒胚按预设路 径移动,限位件限制板体的位移,从而使盒胚初步打开,结构简单且开盒成功率高。 附图说明 图1为盒胚一种实施例的结构示意图; 图2为本发明所述开盒装置的结构示意图一; 图3为本发明所述开盒装置的结构示意图二; 图4为图2所示开盒装置的A的局部放大图; 图5为图3所示开盒装置的B的局部放大图; 图6为本发明所示开盒装置的原理示意图; 图7为本发明计算机可读介质中预设程序被执行时的流程图。 以上各图中:1、盒胚;11、盖板;12、间隙;13、板体;2、取料单元;3、第一驱动单元; 4、限位件;5、第二驱动单元;6、第一移动件;7、第三驱动单元;8、导向件;9、机架;100、第四 驱动件;1001、丝杠;1002、手摇轮;101、料仓。











