
技术摘要:
本发明提供了一种机器人程序复用系统、方法和计算机可读存储介质。本发明在速标定的过程中,不需要识别机器人的基坐标系,即不用测量或校准机器人的位姿与标定设备之间的坐标关系,整个过程简单快速,除标定设备自身,无需额外的仪器测量。并且,本发明能够可采用机器 全部
背景技术:
实际工程应用场合中,常常存在多个相同的工位。每个工位上采用相同的机器人 都在做一样的作业程序。从理论上考虑,各个工位和机器人之间尺寸与坐标关系都是一样 的,因此为提高编程和调试程序效率,可以使用程序复用的方法,即第一个工位调试结束 后,其他工位都不需要再进行调试。实际工程应用中,把程序从一个工位的机器人复制进另 一个工位的机器人上,然后需要人工再重新手动示教精调作业点,才能实现作业。这是由于 机器人本身出厂的精度一致性不好,以及因制造、加工、装配的精度原因,导致各个工位中 机器人与作业点之间实际位姿关系有较大差异,能达到2mm-10mm以上不等。这样随着工位 的增多,程序复用还需要大量的资源接入进行微调工作,效率低下。现也有少部分人在离线 编程和程序复用中,采用标定机器人基坐标系与工件坐标系的方式来获取机器人与工件作 业点之间关系,然后再通过机器人的运动学控制机器人进行作业。此过程中,工件标定过程 比较复杂,还需要基于机器人基坐标系,所以整个标定过程在实际使用中比较耗时,不方便 使用。
技术实现要素:
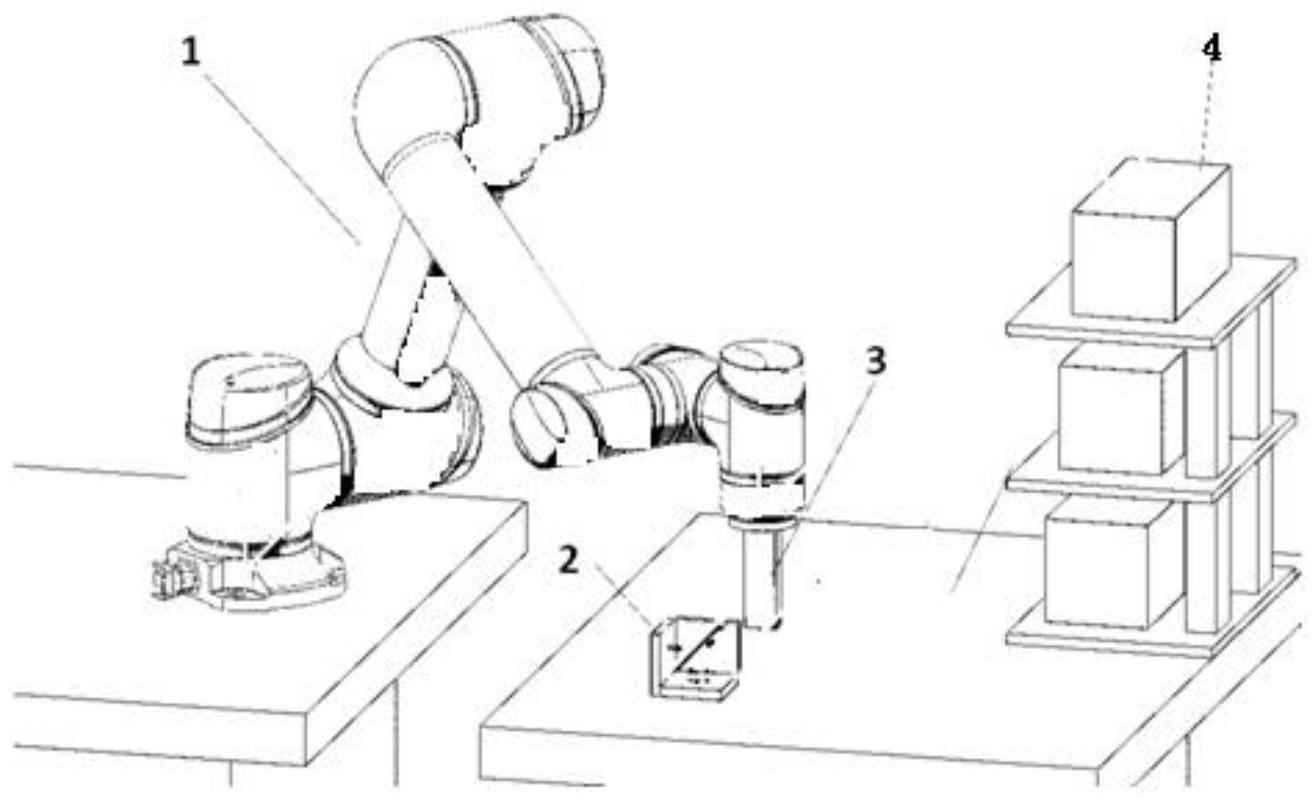
本发明的目的在于提供一种简单快速并且准确高效的机器人程序复用系统、方法 和计算机可读存储介质。为实现本发明的目的,本发明的技术方案如下。 一种机器人程序复用系统,包括机器人、激光测距对齐装置、工装和工件(5); 所述激光测距对齐装置包括XOY平面、XOZ平面、YOZ平面三个正交平面上,XOY平面 设置3个微型激光测距传感器,XOZ平面设置2个微型激光测距传感器,YOZ平面设置1个微型 激光测距传感器;所述激光测距对齐装置在三维测量坐标系下测量工装的平面与微型激光 测距传感器之间的距离值; 所述工装安装在机器人末端,所述工装包括若干正交平面,所述工装(3)的正交平 面可示教到述激光测距对齐装置的6个激光测距传感器上,从而测出激光测距传感器距离 所述工装的平面的距离值; 所述机器人在作业过程中复用基于公共作业点到实际作业点的机器人运动程序。 优选的,所述机器人包多个自由度。 优选的,包括坐标系O、坐标系A、坐标系B、坐标系C、坐标系D,其中,坐标系O为机器 人的基座坐标系,坐标系A为机器人末端的坐标系,坐标系B为机器人末端工装的坐标系,坐 标系C为公共对齐作业点即激光器对齐装置的坐标系,坐标系D为实际作业点的坐标系。 一种应用于上述的机器人程序复用系统进行机器人程序复用方法包括: 标定公共作业点; 4 CN 111546320 A 说 明 书 2/6 页 复制机器人运动程序。 优选的,所述标定公共作业点包括:将机器人末端增加为公共作业点标定的工装; 将机器人末端工装手动示教到公共作业点,记录公共作业点的第一对齐数据; 自动运行公共作业点标定程序时,直接运行手动示教的点位,再次记录公共作业 点的第二对齐数据; 根据自动运行公共作业点的数据1和自动运行公共作业点标定程序的第二对齐数 据,计算出误差; 将误差补偿到自动运动公共作业点后,自动运行实际作业点程序的点位中。 优选的,所述复制机器人运动程序包括:在第一工位中,将机器人安装上工装; 将机器人进行手动示教工装到公共作业点中,记录此时的机器人点位P1,并计算 出坐标系C下的位姿坐标T1; 获得机器人从公共作业点运动到第一作业点D1的机器人运动程序; 将机器人运动程序复制到第二工位,将工装更换到第二工位; 在第二工位上机器人移动到点位P1处,计算出坐标系C下的位姿坐标T2; 计算出位姿变化矩阵T3; 第二工位上,更新并运行机器人运动程序,使机器人运动到第二工位上的第二作 业点D2上。 优选的,位姿坐标 其中R为3X3的旋转矩阵,T为3X1的位置向量。 优选的,由T2=T1×T3计算出位姿变化矩阵T3 优选的,更新并运行机器人运动程序包括: 在机器人运动程序更新按照公式 P ǹ=Pn×T3计算出的运动点位P 2̀~P m̀,其中,n=1~m,P ǹ为运动点位。 一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执 行时实现上述方法。 相对于现有技术,本发明的有益技术效果在于:本发明基于工件坐标系编程的方 式,使得程序复用在工程现场中快速使用,而无需人工接入。本发明克服的技术难点如下: 1 .速标定的过程中,不需要识别机器人的基坐标系,即不用测量或校准机器人的 位姿与标定设备之间的坐标关系。整个过程简单快速,除标定设备自身,无需额外的仪器测 量。 2.本发明能够可采用机器人编程自动运行,根据计算可自动适应各工位之间由于 加工装配造成机器人与工件作业点之间的坐标差异。标定程序运行过程中可无需人工介 入,避免人工误差提高精度,减小人员消耗,也提高整个实施的效率。 为使本申请的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合 所附附图,作详细说明如下。 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对实施例中所需要使用的附 图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看作是对 5 CN 111546320 A 说 明 书 3/6 页 范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这 些附图获得其他相关的附图。 图1为本发明的激光测距对齐装置示意图; 图2为发明的工装示意图; 图3为本发明的机器人意图。











