
技术摘要:
本发明公开一种模拟星球重力的空间定向适应性训练装置及方法,训练装置包括:偏心调节装置、转椅和控制器;转椅包括基座、旋转横杆和座椅;旋转横杆水平设置在基座上,旋转横杆绕基座的旋转中心旋转;座椅用于承载受训者;偏心调节装置为松紧手柄,松紧手柄设置在旋转 全部
背景技术:
在目前的研究中发现具有较高前庭阈值的个体在飞行中易出现空间失定向,而这 种影响在重力条件小于地球的其他星球(如月球)更严重。人体通过位于内耳迷路的耳石器 官感知重力,耳石器官传感器由附着于毛细胞凝胶状基质内(囊斑)的碳酸钙晶体(耳石砂) 组成。当身体倾斜或加速时耳石砂移动、毛细胞产生形变,此时耳石并不能区分倾斜和直线 加速刺激,这对于宇航员来说非常严重。因此,在宇航员执行太空飞行任务或登月任务之 前,需要在地面进行空间定向的适应性训练,即需要一种能够在地球表面模拟其他星球重 力的空间定向适应性训练装置及训练方法,实现在地面1g(g为地球表明的重力加速度)重 力条件下对宇航员的针对性训练。
技术实现要素:
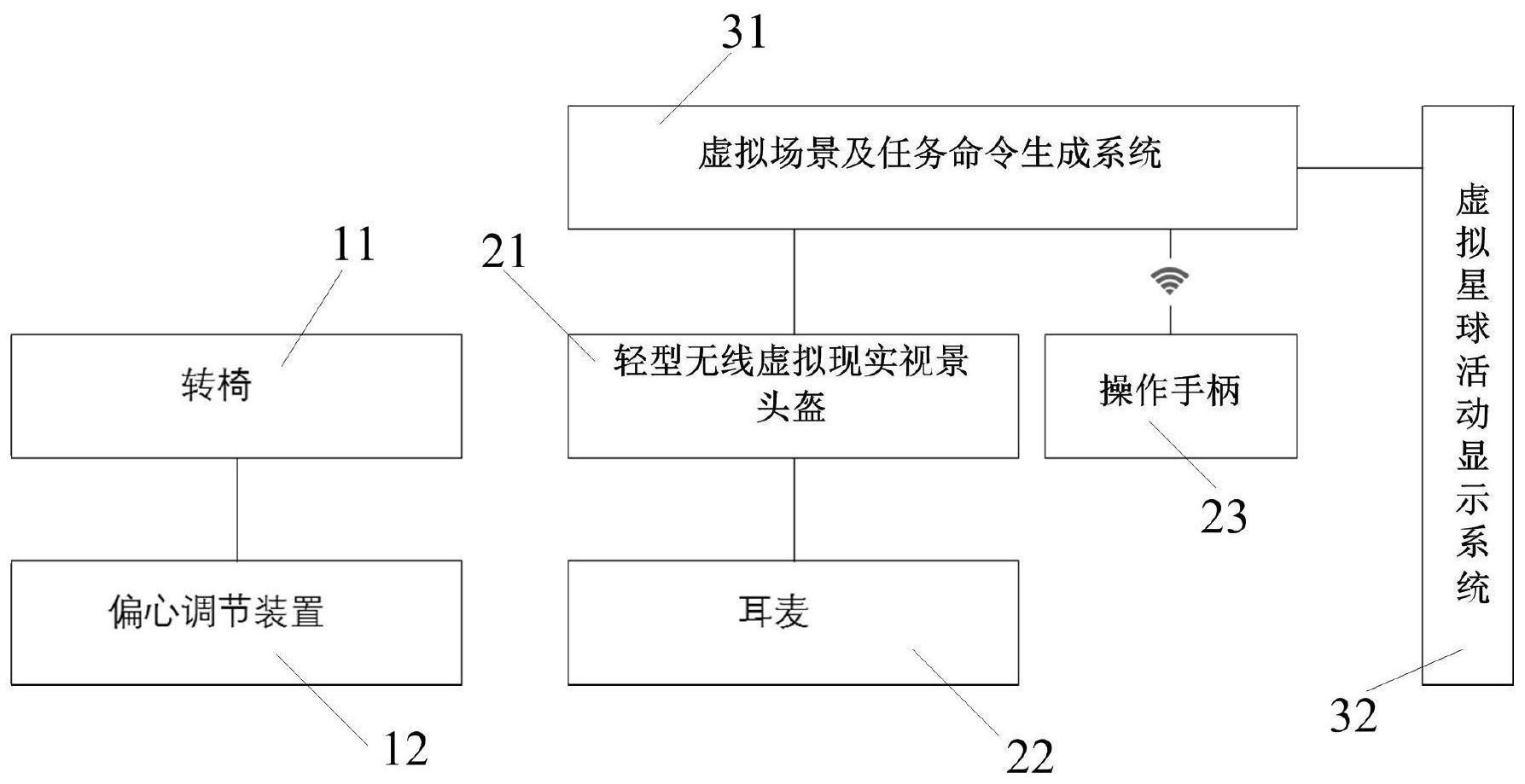
本发明的目的是提供一种模拟星球重力的空间定向适应性训练装置及方法,实现 在地面1g重力条件下对宇航员的针对性训练。 为实现上述目的,本发明提供了如下方案: 一种模拟星球重力的空间定向适应性训练装置,所述训练装置包括:偏心调节装 置、转椅和控制器; 所述转椅包括基座、旋转横杆和座椅; 所述旋转横杆水平设置在所述基座上,所述旋转横杆绕所述基座的旋转中心旋 转; 所述座椅用于承载受训者; 所述偏心调节装置为松紧手柄; 所述松紧手柄设置在所述旋转横杆上,所述松紧手柄上标有距所述旋转中心的刻 度;所述座椅滑动设置在所述旋转横杆上,通过所述松紧手柄调节所述座椅与所述旋转中 心的距离; 所述控制器用于控制所述座椅以设定速度绕所述旋转中心转动。 可选的,所述训练装置还包括轻型无线虚拟现实视景头盔和虚拟场景及任务命令 生成系统; 所述轻型无线虚拟现实视景头盔与所述虚拟场景及任务命令生成系统连接; 所述虚拟场景及任务命令生成系统用于生成虚拟星球场景,并将所述虚拟星球场 景发送至所述轻型无线虚拟现实视景头盔; 所述轻型无线虚拟现实视景头盔用于佩戴在所述受训者头部,向所述受训者展示 所述虚拟星球场景。 4 CN 111544836 A 说 明 书 2/7 页 可选的,所述虚拟星球场景包括星球表面丘陵、星球基地、星球车、登陆星球飞行 器舱内场景和登陆星球飞行器舱外场景。 可选的,所述训练装置还包括耳麦和操作手柄; 所述耳麦与所述轻型无线虚拟现实视景头盔连接; 所述虚拟场景及任务命令生成系统还用于生成场景任务,并将所述场景任务发送 至所述轻型无线虚拟现实视景头盔;所述场景任务包括方向转换任务、拾取任务和特定操 作任务; 所述轻型无线虚拟现实视景头盔将所述场景任务以图像形式展示给所述受训者; 所述轻型无线虚拟现实视景头盔还将所述场景任务通过所述耳麦以语言形式展 示给所述受训者。 所述操作手柄设置在所述座椅上并与所述虚拟场景及任务命令生成系统无线连 接;所述受训者通过所述操作手柄完成所述场景任务。 可选的,所述训练装置还包括虚拟星球活动显示系统; 所述虚拟星球活动显示系统与所述虚拟场景及任务命令生成系统连接; 所述虚拟星球活动显示系统用于显示所述虚拟星球场景、所述场景任务及所述受 训者完成所述场景任务的信息。 可选的,所述操作手柄上设置有方向键、操作键和虚拟拾取装置; 所述方向键用于完成所述方向转换任务; 所述虚拟拾取装置包括拾取键和射线发生器; 所述射线发生器用于在所述虚拟星球场景中产生可见射线,通过所述可见射线选 定所述虚拟星球场景中的虚拟物体,并通过所述拾取键完成所述拾取任务; 所述操作键用于完成所述特定操作任务。 可选的,所述座椅能够绕所述座椅的中心轴转动。 本发明还提供一种模拟星球重力的空间定向适应性训练方法,所述方法用于本发 明提供的模拟星球重力的空间定向适应性训练装置,所述方法包括: 获取待模拟的星球重力条件和座椅距旋转中心的距离; 根据所述待模拟的星球重力条件和所述座椅距旋转中心的距离计算得到平台速 度; 控制所述座椅加速旋转,并获取所述座椅当前的旋转速度; 判断所述座椅当前的旋转速度是否等于所述平台速度,得到第一判断结果; 若所述第一判断结果为否,则返回步骤“控制所述座椅加速旋转,并获取所述座椅 当前的旋转速度”; 若所述第一判断结果为是,则控制所述座椅以所述平台速度匀速旋转。 可选的,在所述控制所述座椅以所述平台速度匀速旋转之后,所述方法还包括:获 取虚拟星球场景及场景任务; 将所述虚拟星球场景和所述场景任务发送至轻型无线虚拟现实视景头盔和虚拟 星球活动显示系统; 获取操作手柄的实时操作信息,并将所述操作信息发送至所述虚拟星球活动显示 系统进行显示。 5 CN 111544836 A 说 明 书 3/7 页 可选的,在所述控制所述座椅以所述平台速度匀速旋转之后,在所述获取虚拟星 球场景及场景任务之前,还包括: 获取所述旋转速度等于所述平台速度的持续时间; 判断所述持续时间是否大于预设阈值,得到第二判断结果; 若所述第二判断结果为是,则获取虚拟星球场景及场景任务; 若所述第二判断结果为否,则返回步骤“获取所述旋转速度等于所述平台速度的 持续时间”。 根据本发明提供的具体实施例,本发明公开了以下技术效果: 本发明提供一种模拟星球重力的空间定向适应性训练装置及方法,训练装置包括 偏心调节装置、转椅和控制器,转椅包括基座、旋转横杆和座椅;所述旋转横杆水平设置在 所述基座上,所述旋转横杆绕所述基座的旋转中心旋转;所述座椅用于承载受训者;所述偏 心调节装置为松紧手柄,所述松紧手柄设置在所述旋转横杆上,所述松紧手柄上标有距所 述旋转中心的刻度;所述座椅滑动设置在所述松紧手柄上,通过所述松紧手柄调节所述座 椅与所述旋转中心的距离;所述控制器用于控制所述座椅以设定速度绕所述旋转中心转 动。训练时,将受训者固定在座椅上,通过松紧手柄调节座椅距旋转中心的距离,并通过控 制器控制座椅以设定速度绕旋转中心转动,通过离心力建立不同于地球表面的重力条件, 实现在地球表明对受训者的前庭功能进行特定重力条件的定向感知训练。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施 例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图 获得其他的附图。 图1为本发明实施例提供的模拟星球重力的空间定向适应性训练装置结构框图; 图2为本发明实施例提供的模拟星球重力的空间定向适应性训练装置结构示意 图; 图3为本发明实施例提供的重力、离心力和倾斜角度关系图; 图4为本发明实施例提供的模拟星球重力的空间定向适应性训练方法流程图。 附图标记说明: 11-转椅,12-偏心调节装置,21-轻型无线虚拟现实视景头盔,22-耳麦,23-操作手 柄,31-虚拟场景及任务命令生成系统,32-虚拟星球活动显示系统。











