
技术摘要:
本发明提供了一种可转位刀具的搬运装置及方法,装置包括:工作台;上料组件配置在工作台上方,用于放置和移动可转位刀具;第一检测装置安装在工作台上方,用于采集放置在上料组件上的可转位刀具的图像;机器人安装在工作台上方,用于抓取放置在上料组件上的可转位刀具 全部
背景技术:
在机械制造生产加工的过程中,需要使用到搬送机构进行物品的自动移位搬送, 将产品从一个工位转移至下一个工位进行不同工艺加工,进行连续循环生产。搬送机构可 代替人的重复劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全, 因而广泛应用于机械制造、冶金、电子等部门。 可转位刀片是一般为粉末冶金的一种产品,在可转位刀片的生产过程中,刀片加 工及包装都需要抓取和转移。目前使用的通过模组传动机构配合限位工装的方式,搬送过 程中存在定位不准确,抓取机构撞击可转位刀片、抓取角度错误不满足后续工序要求等问 题。
技术实现要素:
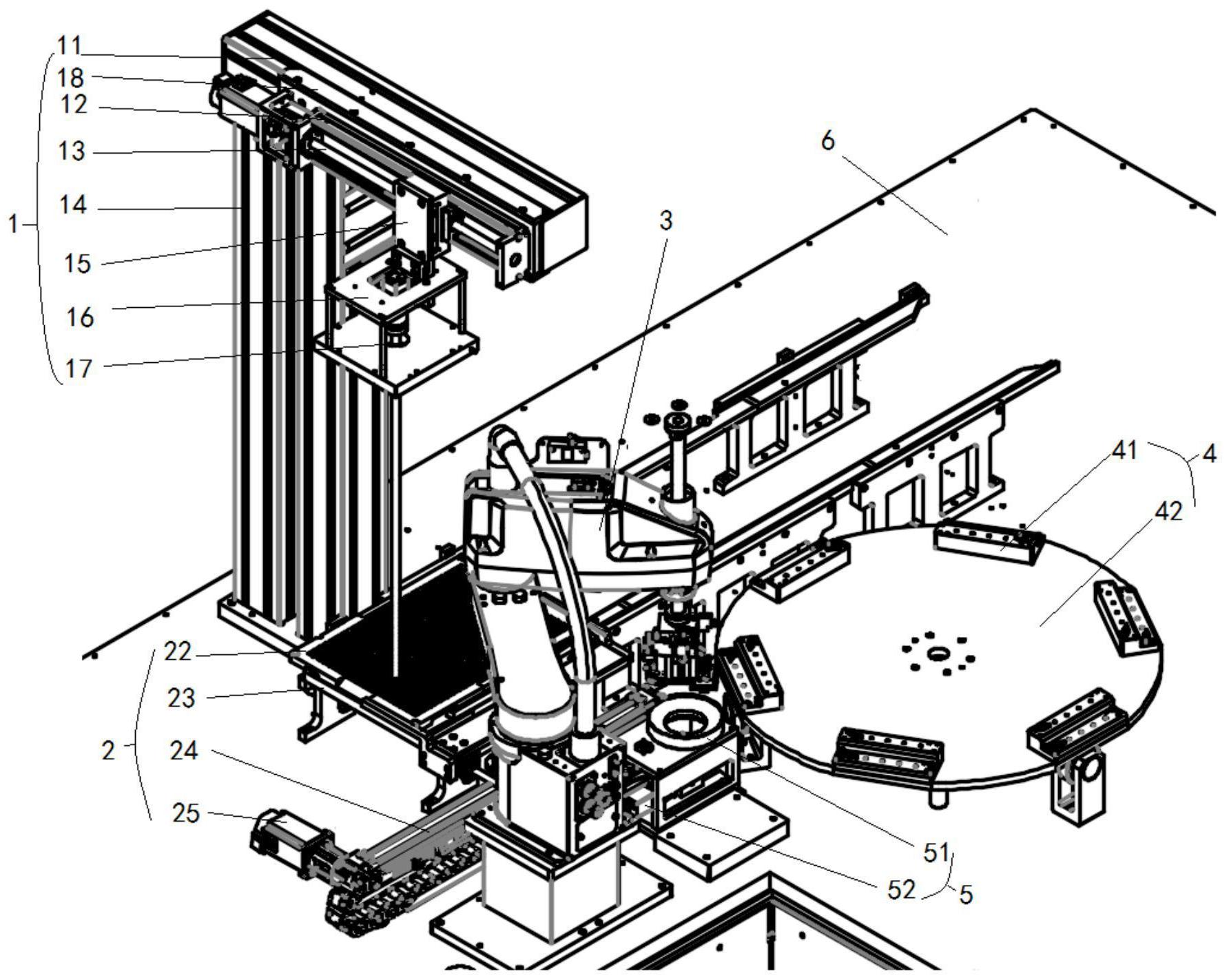
本发明公开了一种可转位刀具的搬运装置及方法,旨在解决可转位刀具在转移过 程中定位不准确,抓取机构误抓取,造成撞击的问题。 本发明第一实施例提供了一种可转位刀具的搬运装置,包括: 工作台; 上料组件;其配置在所述工作台上方,用于放置和移动可转位刀具; 第一检测装置;其安装在所述工作台上方,用于采集放置在所述上料组件上的可 转位刀具的图像; 机器人;其安装在所述工作台上方,用于抓取放置在所述上料组件上的可转位刀 具; 旋转平台组件;其安装在所述工作台上方,用于放置所述机器人抓取的可转位刀 具并移动至预设位置; 控制器,所述控制器的输入端与所述第一检测装置电气连接,所述控制器的输出 端与所述机器电气连接,通过所述第一检测装置获取到的图像信息,判断放置在所述上料 组件的可转位刀具的圆心位置,机器人根据所述圆心位置夹取可转位刀具,并移动至所述 旋转平台组件上。 优选地,所述第一检测装置包括:立柱、横杆、第一电机、丝杆、导轨、滑块及图像获 取装置; 其中,所述立柱固定在所述工作台上,所述横杆固定在所述立柱上,所述第一电机 配置在所述横杆上,所述导轨配置在所述横杆上,所述丝杆与所述第一电机的输出轴连接, 所述滑块套接在所述丝杆上,所述滑块随所述丝杆的转动在所述导轨上运动,所述图像获 取装置固定在所述滑块上,所述第一电机与所述控制器的输出端电气连接,所述图像获取 装置与所述控制器的输入端电气连接。 4 CN 111590377 A 说 明 书 2/6 页 优选地,所述上料组件包括:上料盘、双向导轨、第二电机、传动件; 其中,所述上料盘配置在所述双向导轨上,所述传动件与所述第二电机的输出轴 连接,所述传动件与所述上料盘固定,所述第二电机驱动所述传动件带动所述上料盘在所 述双向导轨上运动,所述第二电机与所述控制器的输出端电气连接。 优选地,所述上料盘在水平平面上开设有呈规则排列的容置槽。 优选地,旋转平台组件:转盘、多个工装及驱动机构; 其中,多个所述工装均匀配置在所述转盘上,所述驱动结构的输出端与所述转盘 的连接,所述驱动机构与所述控制器的输出端电气连接。 优选地,所述机器人为四轴机器人。 优选地,所述图像获取装置包括:第一CCD相机、相机支架及第一光源; 所述相机支架固定在所述滑块上,所述第一CCD相机相机固定在所述相机支架上, 所述第一光源固定在所述相机支架,所述第一CCD相机相机与所述控制器的输入端电气连 接。 优选地,还包括:第二检测装置; 其中,所述第二检测装置包括:第二CCD相机及第二光源,所述第二光源与所述第 二CCD相机固定在所述工作台,且位于所述旋转平台组件的侧部,用于矫正所述机器人将可 转位刀具放置在所述工装上。 优选地,所述工装包括:基座、均匀开设在所述基座上的第一开孔及镶嵌在所述第 一开孔内的磁性机构,所述第一基座表面贴合有防滑套。 本发明第二实施例提供了一种可转位刀具的搬运方法,包括: 接收所述第一检测装置获取到的第一图像数据; 根据所述第一图像数据判断当前位置的可转为刀具是否为混料; 若否,则跳过对当前位置的抓取动作; 若是,则根据所述第一图像数据获取可转位刀具的圆心位置,并将所述圆心位置 发送至所述机器人; 所述机器人根据所述圆心位置运动至所述上料组件处,并抓取放置至在所述上料 组件上的可转位刀具并运动至所述旋转平台组件处; 接收第二检测装置获取到第二图像信息,并根据所述第二图像信息生成控制信 号,并发送至所述机器人; 所述机器人根据所述控制信号调整机械臂,将抓取到的可转位刀具放置至所述旋 转平台组件上; 重复以上步骤,直至所述机器人将所有符合条件的可转位刀具搬运至所述旋转平 台组件上。 基于本发明提供的一种可转位刀具的搬运装置及方法,通过第一检测装置获取呈 杂乱放置在所述上料组件上的可转位刀具图像,当判断某一位置的可转位刀具为混料时, 不进行抓取,当判断到为非混料时,采集图像上的圆心位置,并发送至机器人,使得所述机 器人准确抓取到可转位刀具,并运动至旋转平台组件处,控制器接收所述第二检测模块的 第二图像信息,并根据所述第二图像信息生成动作信号发送至所述机器人,所述机器人根 据所述动作信号调整机械臂后,将可转位刀具以预设的姿态放置在旋转平台组件的工装 5 CN 111590377 A 说 明 书 3/6 页 上,解决了可转位刀具在转移过程中定位不准确,抓取机构误抓取,造成撞击的问题。 附图说明 图1是本发明实施例提供的可转位刀具的搬运装置整体结构示意图; 图2是本发明实施例提供的第一检测装置结构示意图; 图3是本发明实施例提供的上料组件结构示意图; 图4是本发明实施例提供的夹取结构和缓冲机构示意图; 图5是本发明实施例提供的第二检测装置结构示意图; 图6是本发明实施例提供的工装结构示意图。











