
技术摘要:
本发明的一种高带宽电流环数字化控制方法及系统,可解决现有的电流环控制技术动态响应慢、稳定性差的技术问题。包括通过模数转换器对电机的三相电流进行快速采样,同时对采集的电流进行补偿;对采样的三相电流通过坐标变化,将静止的三相坐标系下的电流变换为静止的两 全部
背景技术:
电机的电流环控制在伺服闭环控制中起着非常重要的作用,控制律设计的好坏决 定了对电机的控制效果,电流环相对速度环和位置环来说,控制的好坏更能体现被控对象 的品质,因此在控制律设计的过程中,充分考虑电机的特性及环路的控制方式及控制目标, 找到影响控制设计的因素,如电机的电阻、电感、控制频率、反电动势常数等。 现有的电流环控制技术存在的缺陷有:(1)现有的基于模型的算法太复杂,耗资 源,动态响应慢、稳定性差;(2)传统的PID算法未能利用被控对象信息,导致准确性和快速 性较差。
技术实现要素:
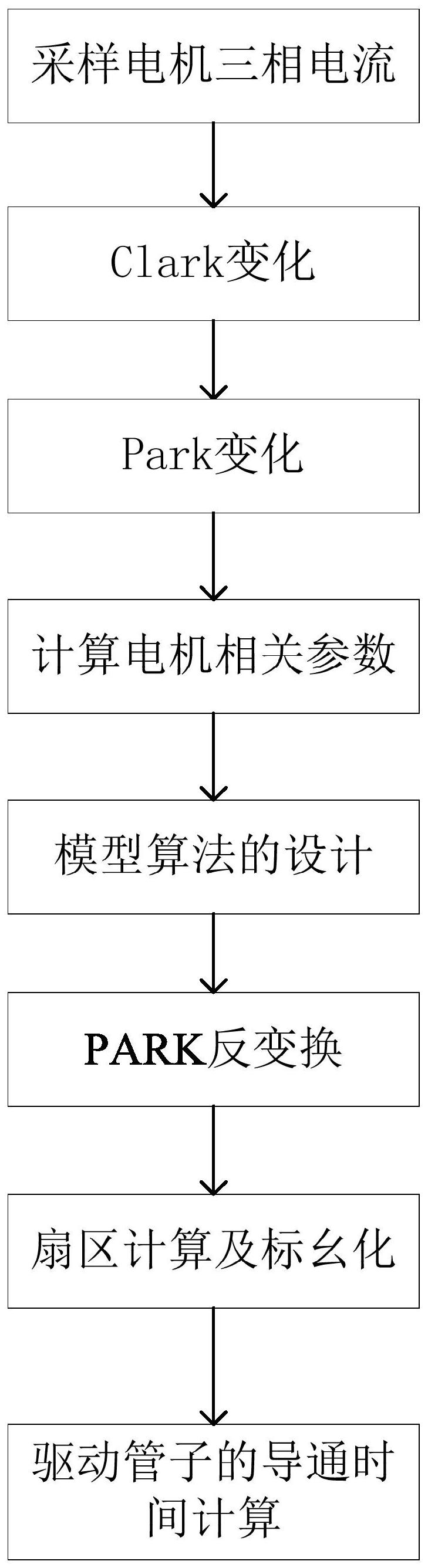
本发明提出的一种高带宽电流环数字化控制方法及系统,可解决现有的电流环控 制技术动态响应慢、稳定性差的技术问题。 为实现上述目的,本发明采用了以下技术方案: 一种高带宽电流环数字化控制方法,包括: 步骤1)采集电机三相电流:通过模数转换器对电机的三相电流进行快速采样,同 时对采集的电流进行补偿; 步骤2)Clark变换:对采样的三相电流通过坐标变化,将静止的三相坐标系下的电 流变换为静止的两相坐标电流信号; 步骤3)PARK变换:进一步将两相静止坐标系下的电流信号变换为旋转正交坐标系 (d、q)下的电流信号,实现励磁和控制的解耦; 步骤4)计算电机相关参数; 步骤5)模型算法的设计:针对电机当前的模型的参数对控制算法进行设计,该算 法除了考虑电机电流控制的精度外,另外还考虑动态响应特性; 步骤6)PARK反变换:将计算出的电压值从正交旋转坐标系下变换至两相静止的坐 标系下; 步骤7)扇区计算及标幺化; 步骤8)驱动管子的导通时间计算; 进一步的,所述步骤4)电机的相关参数包括:确定电机转子机械速度θspd、电感L、 磁链 电阻R、控制频率f、极对数P、反电动势常数kv及直流母线电压U;其中: 6 CN 111555688 A 说 明 书 2/6 页 其中θelec为电机转子的电速度。 进一步的,所述步骤5)具体计算原理如下: 反馈控制率模型补偿项的计算: 其中iqfdb、θspd、idfdb分别为q轴电流分量、转子的电角速度及d轴电流分量。 前馈控制补偿项计算: u2=L×f×0.666, 及反馈误差控制项计算: u3=R×eq_now L×f×0.666×iqin×Khis 其中eq_now、Khis分别为当前的q轴电流分量误差和控制系数。 另一方面,本发明还公开一种高带宽电流环数字化控制系统,包括以下单元: 电流采样单元,用于通过模数转换器对电机的三相电流进行快速采样,同时对采 集的电流进行补偿; 电流坐标转化单元,用于对采样的三相电流通过坐标变化,将静止的三相坐标系 下的电流变换为静止的两相坐标电流信号; 电流信号变换单元,用于将两相静止坐标系下的电流信号变换为旋转正交坐标系 (d、q)下的电流信号,实现励磁和控制的解耦; 电机参数确定单元,用于计算并确定电机相关参数; 控制模块单元,用于基于电机相关参数对控制算法进行设计; 电压值处理单元,用于将计算出的电压值从正交旋转坐标系下变换至两相静止的 坐标系下; 扇区处理单元,用于对扇区计算及标幺化; 驱动管子的导通时间确定单元,用于将驱动管子的导通时间计算。 由上述技术方案可知,本发明的高带宽电流环数字化控制方法具有以下有益效 果: 综合考虑电机的模型,在控制律中引入电机的关键参数及前馈补偿,显著提高了 电流环的响应速度;同时引入反馈误差补偿项,增加环路的稳定性和准确性,使得电流的控 制在不影响电流控制精度的前提下,提高环路的响应能力,因此增加的系统的带宽。 附图说明 图1为本发明方法的步骤流程图; 图2为本发明算法实现部分步骤流程图。











