
技术摘要:
一种机器人机电手术器械,包括:壳体;从壳体向远侧延伸的细长轴;支撑在细长轴上的腕组件;联接至腕组件的末端执行器;支撑在腕组件内的万向接头组件;以及联接至腕组件的线缆。所述细长轴限定纵向轴线。所述腕组件包括联接至第二接头的第一接头。万向接头组件能旋转 全部
背景技术:
机器人手术系统已用于微创医疗程序中。一些机器人手术系统包括支撑手术机械 臂的控制台和具有安装在机械臂上的至少一个末端执行器(例如钳子或吻合装置)的手术 器械。机械臂为手术器械的操作和运动提供机械动力。每个机械臂可包括操作地连接至手 术器械的器械驱动单元。手术器械可以包括线缆,所述线缆被马达驱动以操作手术器械的 末端执行器。
技术实现要素:
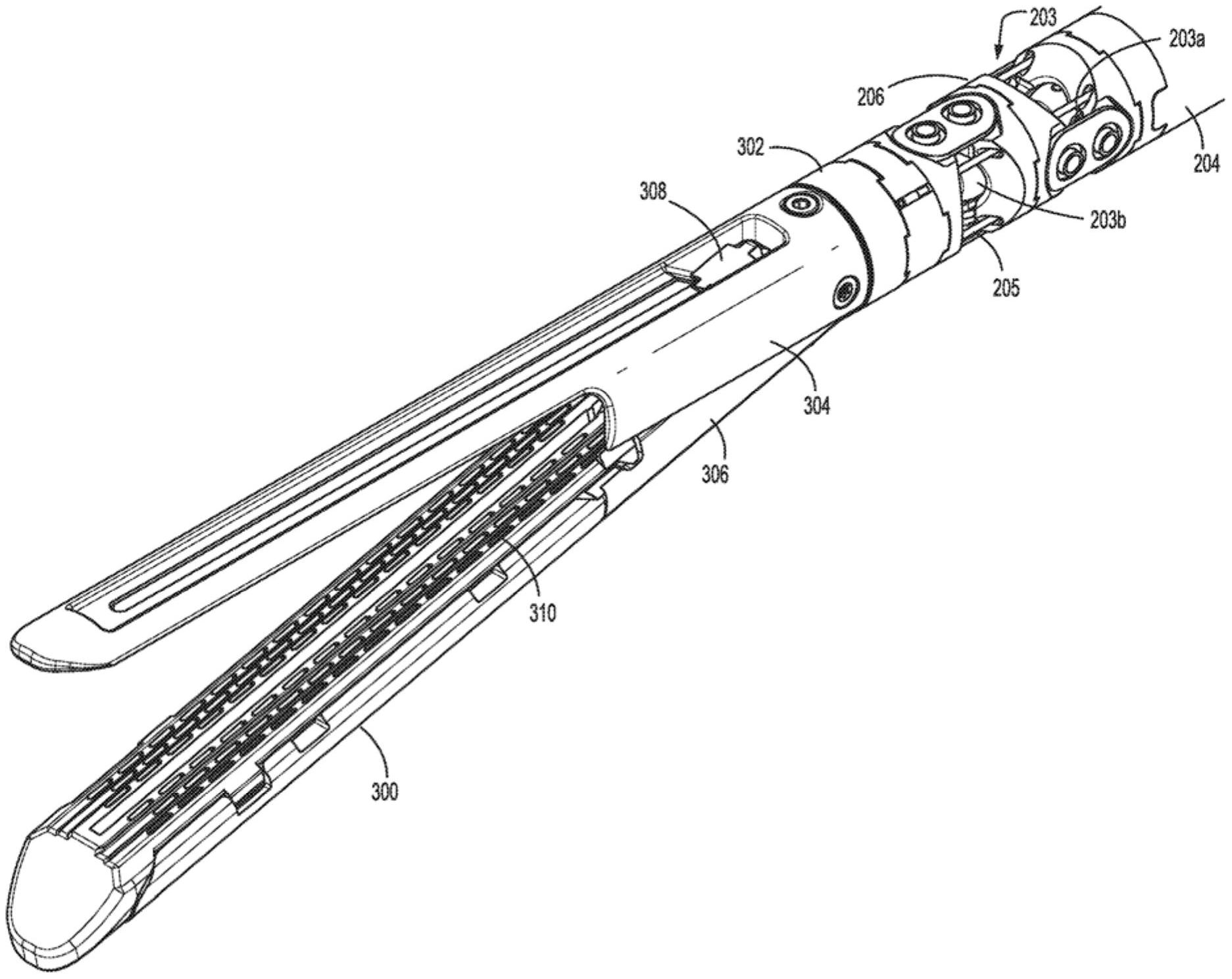
本公开涉及用于手术程序的手术器械。更具体地,本公开涉及用于执行微创手术 程序的机器人手术系统的可关节式运动的机器人手术器械。本公开提供了用于机器人手术 系统的较小的手术器械,其提供了增加的关节式运动、扭矩传递和机械操纵。 根据本公开的一个方面,提供了一种机器人机电手术器械。所述手术器械包括壳 体、从壳体向远侧延伸的细长轴、支撑在细长轴上的腕组件、联接至腕组件的末端执行器、 支撑在腕组件内的万向接头组件以及联接至腕组件的线缆。 所述细长轴限定纵向轴线。腕组件包括联接至第二接头的第一接头。万向接头能 旋转以致动末端执行器的功能。线缆能移动以操纵第一接头和第二接头,以使万向接头组 件和腕组件能够相对于纵向轴线进行关节式运动。 在一些实施例中,第一接头和第二接头可绕纵向轴线相对于彼此成角度地移位设 置。 在某些实施例中,第一接头和第二接头中的每一个可以具有近侧段和远侧段。近 侧段和远侧段可以被支撑以相对于彼此运动,以利于腕组件相对于细长轴的纵向轴线的关 节式运动。第一接头的近侧段和远侧段可包括被支撑为彼此滚动接触的联接器(例如,齿 轮)。第二接头的近侧段和远侧段可以包括被支撑为彼此滚动接触的联接器(例如,齿轮)。 第一接头的近侧段和远侧段可以通过第一对连杆联接在一起,并且第二接头的近侧段和远 侧段可以通过第二对连杆联接在一起。 此外,尽管本文描述了各种齿轮/联接器,但是这些齿轮/联接器可包括联接器、齿 轮、齿轮状几何形状、其他合适的交错几何形状和/或其组合。例如,这样的齿轮/联接器可 以被构造成强制执行接头的一部分在接头的另一部分上的确定性滚动运动和/或可以被构 造成用于高摩擦接合。 在一些实施例中,腕组件的第一接头可通过第一管状接口联接至细长轴,而腕组 件的第二接头可通过第二管状接口联接至末端执行器。第一接头可以旋转地锁定至第一管 状接口,而第二接头可以旋转地锁定至第二管状接口。 在某些实施例中,第一接头和第二接头可限定穿过其中的中央开口,所述中央开 口被定位成在其中容纳万向接头组件。 在某些实施例中,万向接头组件可以包括两个以上万向接头,所述两个以上万向 4 CN 111556734 A 说 明 书 2/9 页 接头沿着万向接头组件位于纵向间隔开的位置处。 根据另一方面,提供了一种机器人手术系统。机器人手术系统包括机器人手术组 件和选择性地安装至机器人手术器械的机电手术器械。 所述手术器械包括:壳体;从壳体向远侧延伸至腕组件的细长轴;发射组件,其延 伸穿过腕组件并且包括万向接头;末端执行器,其支撑在腕组件上并固定至发射组件;和线 缆驱动组件。 所述细长轴限定纵向轴线。腕组件包括联接至第二接头的第一接头。线缆驱动组 件能由机器人手术组件致动,以操纵第一接头和第二接头,并使发射组件和腕组件相对于 纵向轴线进行关节式运动。 在一些实施例中,第一接头和第二接头绕纵向轴线相对于彼此成角度地移位设 置。第一接头和第二接头中的每一个可以具有近侧段和远侧段。近侧段和远侧段可以被支 撑以相对于彼此运动,以利于腕组件相对于细长轴的纵向轴线的关节式运动。第一接头的 近侧段和远侧段可包括被支撑为彼此滚动接触的联接器(例如,齿轮)。第二接头的近侧段 和远侧段可包括被支撑为彼此滚动接触的联接器(例如,齿轮)。 所述第一接头的近侧段和远侧段可以通过第一对连杆联接在一起,并且第二接头 的近侧段和远侧段可以通过第二对连杆联接在一起。 在一些实施例中,腕组件的第一接头可以通过第一管状接口联接至细长轴,并且 腕组件的第二接头可以通过第二管状接口联接至末端执行器。第一接头可以旋转地锁定至 第一管状接口,并且第二接头可以旋转地锁定至第二管状接口。 在某些实施例中,第一接头和第二接头可限定穿过其中的中央开口,所述中央开 口被定位成在其中容纳发射组件。 在一些实施例中,两个以上万向接头可以沿着发射组件位于纵向间隔开的位置 处。 有利地,当前公开的手术器械提供确定的末端执行器位置,同时抵抗外部负载(例 如,来自患者解剖结构的负载)影响驱动系统。另外,当前公开的手术器械包括具有互锁几 何形状的圆齿齿轮装置(或联接器),所述圆齿齿轮装置保持齿轮之间的滚动接触,以防止 末端执行器位置可能不确定的接头中的“S”状态。 当前公开的手术器械还在保持最小弯曲半径的同时在两个方向上提供了高关节 式运动(例如, /-70度)。在一些实施例中,附加的线缆可以被布线以在末端执行器处提供 附加的机械功能(例如,专用抓握功能)。 通过下面的描述、附图和权利要求,由本文描述的一些或全部示例性实施例提供 的其他方面、特征和优点将变得显而易见。 附图说明 结合在本说明书中并构成本说明书一部分的附图示出了用于机器人手术系统的 本手术器械的实施例,并且与以上给出的公开内容的一般描述以及以下给出的(一个以上) 实施例的详细描述一起用于解释本公开的原理,其中: 图1是根据本公开的机器人手术系统的示意图; 图2是图1的机器人手术系统的手术器械处于非关节式运动位置的立体图; 5 CN 111556734 A 说 明 书 3/9 页 图3是图2中所示的指示细节区域的放大立体图; 图4是图2的手术器械的末端执行器的立体图,示出为与手术器械的细长轴组件的 腕组件分开; 图5和图6是图4的腕组件的立体图; 图7是图4的细长轴组件的部件分离的立体图; 图8是沿图5的剖切线8-8截取的图5的腕组件的放大剖面图; 图9是图5的腕组件的放大图,为了清楚起见,其部分用虚线表示; 图10是图2所示的指示细节区域的放大、纵向剖面图; 图11是沿图10的剖切线11-11截取的图5的腕组件的剖面图; 图12是图2的手术器械的远侧部的俯视图,其腕组件处于关节式运动位置; 图13是图12中所示的指示细节区域的放大图; 图14是图13的纵向剖面图; 图15是以示例性的关节式运动位置示出的图2的手术器械的立体图;和 图16是图15中所示的指示细节区域的放大图,为了清楚起见,其部分被移除。











