
技术摘要:
本发明实施例公开了一种数据处理和模型训练方法、装置、电子设备和存储介质。通过获取目标任务的任务属性信息和目标超时率,根据所述目标任务的任务属性信息和预先训练的第一预测模型确定第一预测时长,根据所述目标任务的任务属性信息和预先训练的第二预测模型确定第 全部
背景技术:
在涉及线下配送的业务中,例如外卖业务和快递业务等,为了提升用户体验,通常 会在配送之前预测一个配送时间,使得用户能够合理的安排时间来接收外卖或快递。 现有技术中通常采用全量订单数据(即,配送业务的所有订单数据)训练一个机器 学习模型,进而在用户下单后,利用该模型预测订单的配送时间。但是,目前的对于任务完 成时间的预测并不准确,往往造成超时率不可控。如果使用人工方式或固定加时方式调整 任务的预测和调度,仍然会使得超时率不能被控制在合理区间内。
技术实现要素:
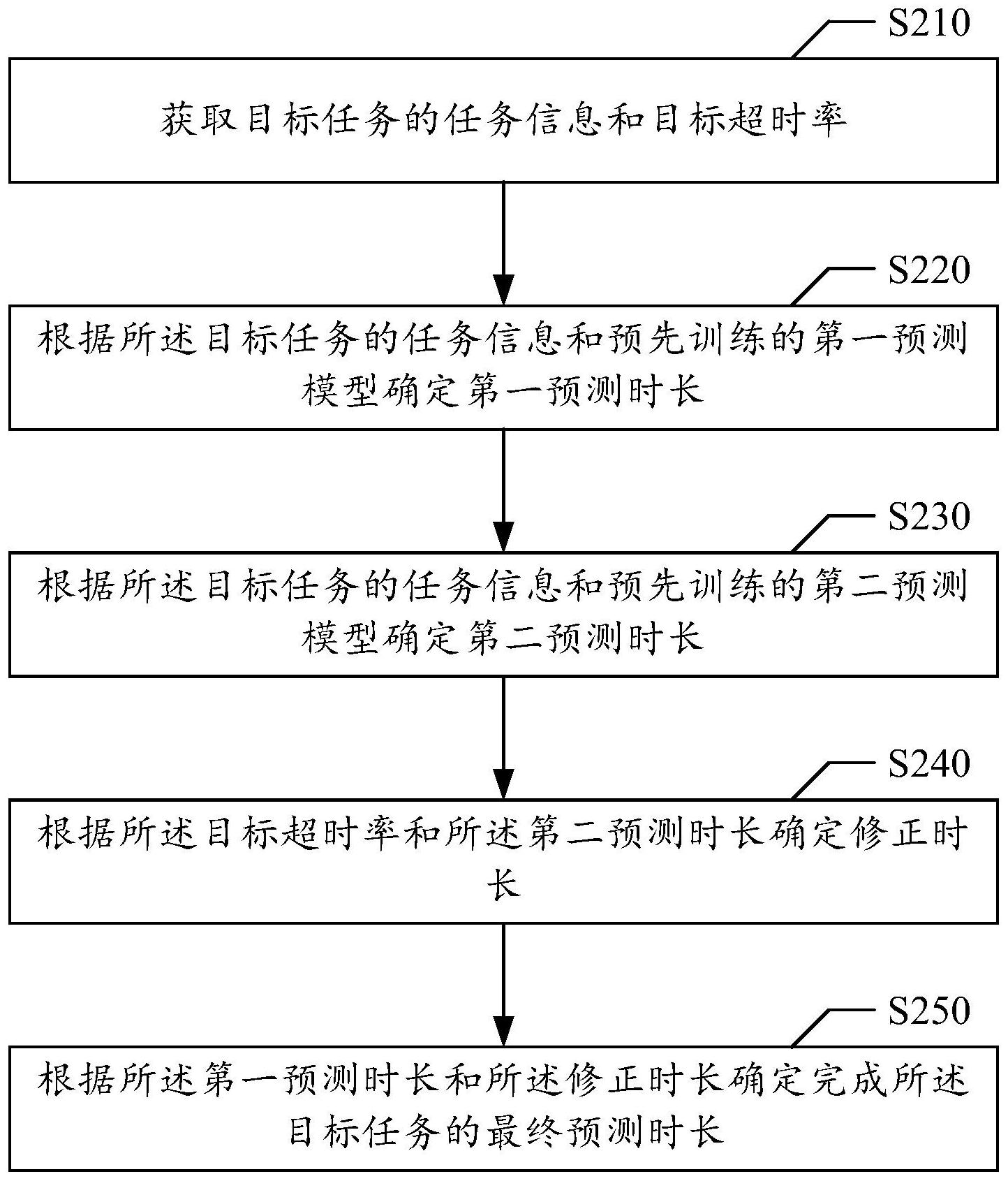
有鉴于此,本发明实施例提供了一种数据处理和模型训练方法、装置、电子设备和 存储介质,以使得任务调度过程中超时率可控,提升平台的任务执行效率和用户体验。 第一方面,本发明实施例提供了一种数据处理方法,所述方法包括: 获取目标任务的任务属性信息和目标超时率,所述目标超时率用于表征所述目标 任务超时概率的预期值; 根据所述目标任务的任务属性信息和预先训练的第一预测模型确定第一预测时 长,所述第一预测模型用于确定完成所述目标任务的预测时长; 根据所述目标任务的任务属性信息和预先训练的第二预测模型确定第二预测时 长,所述第二预测模型用于确定所述第一预测模型的预测误差; 根据所述目标超时率和所述第二预测时长确定修正时长;以及 根据所述第一预测时长和所述修正时长确定完成所述目标任务的最终预测时长。 优选地,根据所述目标超时率和所述第二预测时长确定修正时长包括: 根据所述目标超时率和预先确定的映射关系确定修正倍数,所述映射关系为目标 超时率与修正倍数的对应关系;以及 根据所述修正倍数和所述第二预测时间确定所述修正时长。 优选地,根据所述目标超时率和所述第二预测时长确定修正时长包括: 根据所述目标任务属性信息获取所述目标任务的类别; 根据所述目标任务的类别获取对应的映射关系,所述映射关系为预先确定的目标 超时率与修正倍数的对应关系; 根据所述目标超时率和所述映射关系确定修正倍数;以及 根据所述修正倍数和所述第二预测时间确定所述修正时长。 优选地,通过预先训练的分类模型根据所述目标任务的任务属性信息获取所述目 标任务的类别。 4 CN 111598487 A 说 明 书 2/14 页 优选地,获取所述预先确定的映射关系包括: 获取训练集,所述训练集包括多个训练样本,所述训练样本包括历史任务的任务 属性信息和完成所述历史任务的实际时长; 根据所述历史任务的任务属性信息和预先训练的第一预测模型确定历史任务的 第一预测时长; 根据所述历史任务的任务属性信息和预先训练的第二预测模型确定历史任务的 第二预测时长;以及 根据所述第一预测时长和所述第二预测时长确定所述映射关系。 优选地,所述完成所述目标任务的最终预测时长为所述第一预测时长和所述修正 时长之和。 第二方面,本发明实施例提供了一种模型训练方法,所述方法包括: 获取训练集,所述训练集包括多个训练样本,所述训练样本包括历史任务的任务 属性信息和完成所述历史任务的实际时长; 根据所述历史任务的任务属性信息和预先训练的第一预测模型获取历史任务的 第一预测时长,所述第一预测模型用于确定完成所述历史任务的预测时长; 根据所述历史任务的第一预测时长和所述实际时长确定历史任务的时长误差;以 及 根据所述历史任务的时长误差训练用于预测第二预测时长的第二预测模型。 优选地,所述历史任务的时长误差为所述第一预测时长与所述实际时长的差值的 绝对值。 第三方面,本发明实施例提供了一种数据处理装置,所述装置包括: 信息获取单元,用于获取目标任务的任务属性信息和目标超时率,所述目标超时 率用于表征所述目标任务超时概率的预期值; 第一预测单元,用于根据所述目标任务的任务属性信息和预先训练的第一预测模 型确定第一预测时长,所述第一预测模型用于确定完成所述目标任务的预测时长; 第二预测单元,用于根据所述目标任务的任务属性信息和预先训练的第二预测模 型确定第二预测时长,所述第二预测模型用于确定所述第一预测模型的预测误差; 修正单元,用于根据所述目标超时率和所述第二预测时长确定修正时长;以及 时长确定单元,用于根据所述第一预测时长和所述修正时长确定完成所述目标任 务的最终预测时长。 优选地,所述第二预测单元包括: 倍数确定子单元,用于根据所述目标超时率和预先确定的映射关系确定修正倍 数,所述映射关系为目标超时率与修正倍数的对应关系;以及 修正时长确定子单元,用于根据所述修正倍数和所述第二预测时间确定所述修正 时长,所述修正时长为所述修正倍数与所述第二预测时长的乘积。 优选地,所述第二预测单元包括: 类别确定子单元,用于根据所述目标任务属性信息获取所述目标任务的类别; 映射关系确定子单元,用于根据所述目标任务的类别获取对应的映射关系,所述 映射关系为预先确定的目标超时率与修正倍数的对应关系; 5 CN 111598487 A 说 明 书 3/14 页 倍数确定子单元,用于根据所述目标超时率和所述映射关系确定修正倍数;以及 修正时长确定子单元,用于根据所述修正倍数和所述第二预测时间确定所述修正 时长。 优选地,所述类别确定子单元用于通过预先训练的分类模型根据所述目标任务的 任务属性信息获取所述目标任务的类别。 优选地,所述装置还包括: 映射关系获取单元,用于获取所述映射关系; 其中,所述映射关系获取单元包括: 训练集获取子单元,用于获取训练集,所述训练集包括多个训练样本,所述训练样 本包括历史任务的任务属性信息和完成所述历史任务的实际时长; 第一预测时长确定子单元,用于根据所述历史任务的任务属性信息和预先训练的 第一预测模型确定历史任务的第一预测时长; 第二预测时长确定子单元,用于根据所述历史任务的任务属性信息和预先训练的 第二预测模型确定历史任务的第二预测时长;以及 映射关系确定子单元,用于根据所述第一预测时长和所述第二预测时长确定所述 映射关系。 优选地,所述完成所述目标任务的最终预测时长为所述第一预测时长和所述修正 时长之和。 第四方面,本发明实施例提供了一种模型训练装置,所述装置包括: 训练集获取单元,用于获取训练集,所述训练集包括多个训练样本,所述训练样本 包括历史任务的任务属性信息和完成所述历史任务的实际时长; 第一预测单元,用于根据所述历史任务的任务属性信息和预先训练的第一预测模 型获取历史任务的第一预测时长,所述第一预测模型用于确定完成所述历史任务的预测时 长; 时长差值确定单元,用于根据所述历史任务的第一预测时长和所述实际时长确定 历史任务的时长误差;以及 模型训练单元,用于根据所述历史任务的时长误差训练用于预测第二预测时长的 第二预测模型。 优选地,所述历史任务的时长差值为所述第一预测时长与所述实际时长的差值的 绝对值。 第五方面,本发明实施例提供了一种电子设备,包括存储器和处理器,所述存储器 用于存储一条或多条计算机程序指令,其中,所述一条或多条计算机程序指令被所述处理 器执行以实现如第一方面和第二方面所述的方法。 第六方面,本发明实施例提供了一种计算机可读存储介质,其上存储计算机程序 指令,所述计算机程序指令在被处理器执行时实现如第一方面和第二方面所述的方法。 本发明实施例的技术方案通过获取目标任务的任务属性信息和目标超时率,根据 所述目标任务的任务属性信息和预先训练的第一预测模型确定第一预测时长,根据所述目 标任务的任务属性信息和预先训练的第二预测模型确定第二预测时长,根据所述目标超时 率和所述第二预测时长确定修正时长,根据所述修正时长对第一预测时长进行调整确定完 6 CN 111598487 A 说 明 书 4/14 页 成所述目标任务的最终预测时长。由此,可以使得任务调度过程中超时率可控,提升平台的 任务执行效率和用户体验。 附图说明 通过以下参照附图对本发明实施例的描述,本发明的上述以及其它目的、特征和 优点将更为清楚,在附图中: 图1是本发明实施例的业务处理系统的示意图; 图2是本发明实施例的数据处理方法的流程图; 图3是本发明实施例的训练第二预测模型的流程图; 图4是本发明实施例的确定修正时长的流程图; 图5是本发明实施例的确定修正时长的流程图; 图6是本发明实施例的映射关系的示意图; 图7是本发明实施例的获取映射关系的流程图; 图8是本发明实施例的预测时长的装置的示意图; 图9是本发明实施例的模型训练装置的示意图; 图10是本发明实施例的电子设备的示意图。











