
技术摘要:
本申请的实施例提供了一种车辆驾驶预警方法和装置。本申请实施例中的车辆驾驶预警方法包括:确定目标车辆以及与所述目标车辆处于同一目标行驶道路的目标行驶车辆;获取所述目标车辆的运动参数、所述目标行驶车辆的运动参数以及所述目标行驶道路对应的驾驶安全距离参数 全部
背景技术:
在智能驾驶领域中,为了避免处于同一行驶道路的车辆之间发生碰撞,会根据各 个车辆当前行驶状态为用户提供车辆之间的碰撞预警,以降低事故率。目前,碰撞预警所确 定的碰撞时间预警阈值一般根据各个车辆的当前行驶状态来确定,该方式并未考虑到不同 类型的车辆的个体差异,因此存在预警精准度差的问题。
技术实现要素:
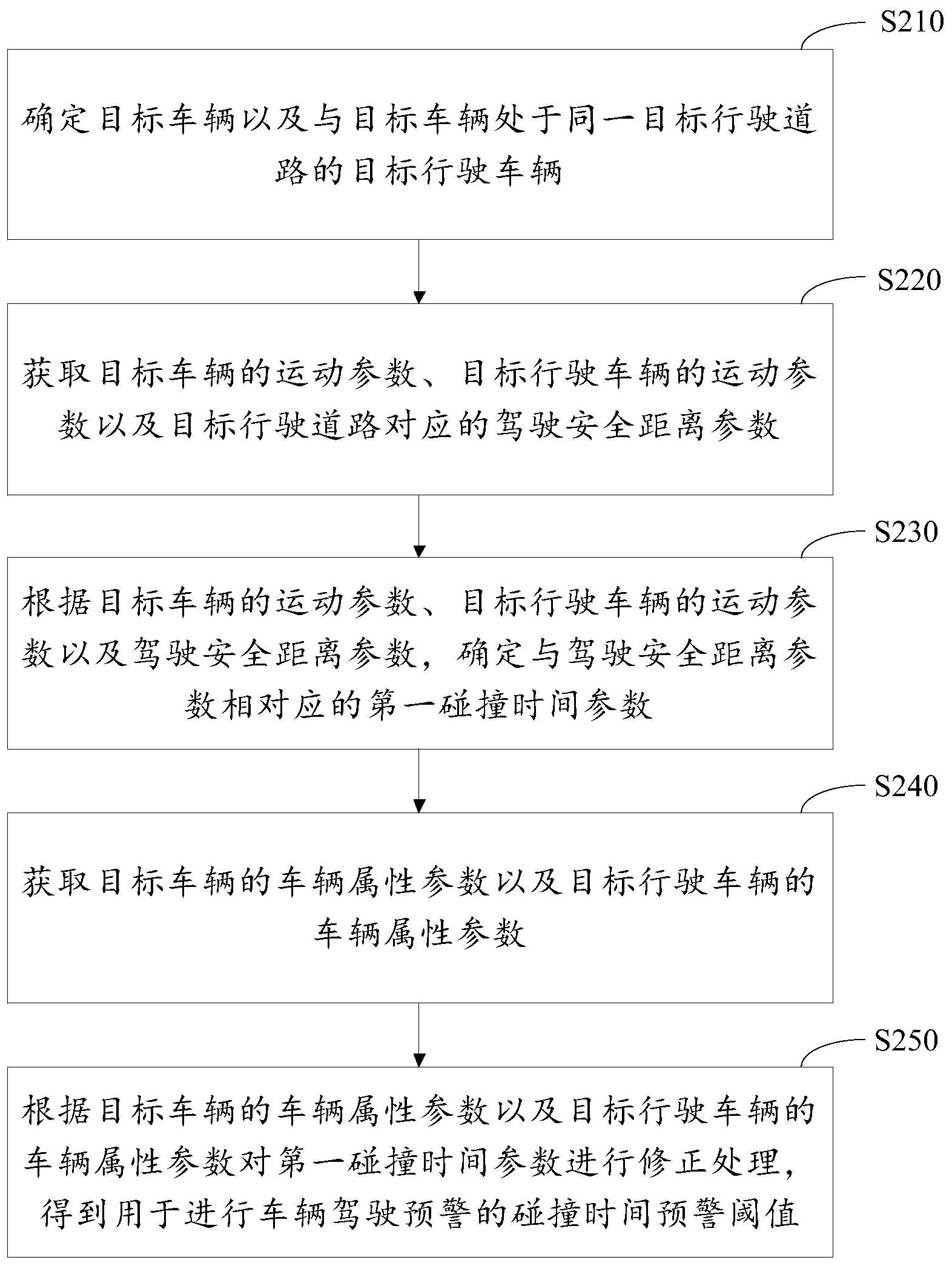
本申请的实施例提供了一种车辆驾驶预警方法和装置,可以解决车辆进行碰撞预 警的精准度较差的技术问题。 本申请的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本申请 的实践而习得。 根据本申请实施例的一个方面,提供了一种车辆驾驶预警方法,包括:确定目标车 辆以及与所述目标车辆处于同一目标行驶道路的目标行驶车辆;获取所述目标车辆的运动 参数、所述目标行驶车辆的运动参数以及所述目标行驶道路对应的驾驶安全距离参数;根 据所述目标车辆的运动参数、所述目标行驶车辆的运动参数以及所述驾驶安全距离参数, 确定与所述驾驶安全距离参数相对应的第一碰撞时间参数;获取所述目标车辆的车辆属性 参数以及所述目标行驶车辆的车辆属性参数;根据所述目标车辆的车辆属性参数以及所述 目标行驶车辆的车辆属性参数对所述第一碰撞时间参数进行修正处理,得到用于进行车辆 驾驶预警的碰撞时间预警阈值。 根据本申请实施例的一个方面,提供了一种车辆驾驶预警装置,包括:第一执行单 元,用于确定目标车辆以及与所述目标车辆处于同一目标行驶道路的目标行驶车辆;第一 获取单元,用于获取所述目标车辆的运动参数、所述目标行驶车辆的运动参数以及所述目 标行驶道路对应的驾驶安全距离参数;第二执行单元,用于根据所述目标车辆的运动参数、 所述目标行驶车辆的运动参数以及所述驾驶安全距离参数,确定与所述驾驶安全距离参数 相对应的第一碰撞时间参数;第二获取单元,用于获取所述目标车辆的车辆属性参数以及 所述目标行驶车辆的车辆属性参数;修正单元,用于根据所述目标车辆的车辆属性参数以 及所述目标行驶车辆的车辆属性参数对所述第一碰撞时间参数进行修正处理,得到用于进 行车辆驾驶预警的碰撞时间预警阈值。 在本申请的一些实施例中,基于前述方案,所述运动参数包括行驶速度和行驶加 速度,所述第一执行单元被配置为:根据所述目标车辆的行驶速度、所述目标车辆的行驶加 速度、所述目标行驶车辆的行驶速度、所述目标行驶车辆的行驶加速度以及所述驾驶安全 距离参数,确定与所述驾驶安全距离参数相对应的第一碰撞时间参数。 在本申请的一些实施例中,基于前述方案,所述车辆属性参数包括内轮差、盲区面 5 CN 111583713 A 说 明 书 2/14 页 积、车身高度以及车辆总重量中的一种或多种,所述修正单元被配置为:第一执行子单元, 用于确定所述目标行驶车辆与所述目标车辆所对应的各种类型的车辆属性参数之间的比 值;修正子单元,用于基于所述比值对所述第一碰撞时间参数进行修正处理,得到用于进行 车辆驾驶预警的碰撞时间预警阈值,所述碰撞时间预警阈值与所述比值为正相关关系。 在本申请的一些实施例中,基于前述方案,若所述目标行驶车辆的车辆总重量为 车辆总重量区间,则所述第一执行子单元被配置为:确定所述目标行驶车辆的车辆总重量 区间与所述目标车辆的车辆总重量之间的重量比值区间;根据所述重量比值区间确定所述 目标行驶车辆与所述目标车辆所对应的各种类型的车辆属性参数之间的属性比值区间;所 述修正子单元被配置为:基于所述属性比值区间对所述第一碰撞时间参数进行修正处理, 得到用于进行车辆驾驶预警的碰撞时间预警阈值区间;从所述碰撞时间预警阈值区间中选 取用于进行车辆驾驶预警的碰撞时间预警阈值。 在本申请的一些实施例中,基于前述方案,所述第一执行子单元被配置为:确定所 述目标行驶车辆的车辆类型,并获取与所述车辆类型相对应的车辆载重记录;根据所述车 辆载重记录,确定所述目标行驶车辆的超载量期望;根据所述超载量期望以及所述目标行 驶车辆的车辆总重量区间,确定所述目标行驶车辆的实际总重量区间;确定所述目标行驶 车辆的实际总重量区间与所述目标车辆的车辆总重量之间的重量比值区间。 在本申请的一些实施例中,基于前述方案,所述第一执行子单元被配置为:根据所 述车辆载重记录,确定与所述目标行驶车辆所属车辆类型相对应的超载车辆占比和超载车 辆的平均超载量;根据所述超载车辆占比以及所述平均超载量,确定所述目标行驶车辆的 超载量期望。 在本申请的一些实施例中,基于前述方案,所述修正子单元被配置为:根据所述车 辆载重记录,确定所述目标行驶车辆相对应的车辆总重量在所述车辆总重量区间的分布类 型;基于所述分布类型在所述碰撞时间预警阈值区间进行取值处理,得到用于进行车辆驾 驶预警的碰撞时间预警阈值。 在本申请的一些实施例中,基于前述方案,所述车辆驾驶预警装置,还包括:第三 获取单元,用于获取所述目标车辆与所述目标行驶车辆之间的当前距离参数;第三执行单 元,用于根据所述目标车辆的运动参数、所述目标行驶车辆的运动参数以及所述当前距离 参数,确定与所述当前距离参数相对应的第二碰撞时间参数;生成单元,用于若监测到所述 第二碰撞时间参数小于所述碰撞时间预警阈值,则生成碰撞风险预警通知。 在本申请的一些实施例中,基于前述方案,所述第三执行单元被配置为:若监测到 所述当前距离参数小于预定距离阈值,则根据所述目标车辆的运动参数、所述目标行驶车 辆的运动参数以及所述驾驶安全距离参数,确定与所述当前距离参数相对应的第二碰撞时 间参数。 根据本申请实施例的一个方面,提供了一种计算机可读介质,其上存储有计算机 程序,所述计算机程序被处理器执行时实现如上述实施例中所述的车辆驾驶预警方法。 根据本申请实施例的一个方面,提供了一种电子设备,包括:一个或多个处理器; 存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执 行时,使得所述一个或多个处理器实现如上述实施例中所述的车辆驾驶预警方法。 在本申请的一些实施例所提供的技术方案中,通过目标车辆以及目标行驶车辆所 6 CN 111583713 A 说 明 书 3/14 页 具有的车辆属性差异对第一碰撞时间参数进行了修正,相较于现有技术中仅根据驾驶安全 距离参数来确定用于进行车辆驾驶预警的碰撞时间预警阈值,本技术方案可以在充分考虑 不同车辆的个体差异而导致碰撞风险的差异,提高了所确定的用于进行车辆驾驶预警的碰 撞时间预警阈值的准确性,从而提高了对车辆进行车辆驾驶预警的精准度,进而提高了车 辆智能驾驶的安全性。 应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不 能限制本申请。 附图说明 此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施 例,并与说明书一起用于解释本申请的原理。显而易见地,下面描述中的附图仅仅是本申请 的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 这些附图获得其他的附图。 在附图中: 图1示出了可以应用本申请实施例的技术方案的示例性系统架构的示意图。 图2示出了根据本申请的一个实施例的车辆驾驶预警方法的流程图。 图3示出了根据本申请的一个实施例的车辆驾驶预警方法的步骤S250的具体流程 图。 图4示出了根据本申请的一个实施例的车辆驾驶预警方法的步骤S310的具体流程 图。 图5示出了根据本申请的一个实施例的车辆驾驶预警方法的步骤S320的具体流程 图。 图6示出了根据本申请的一个实施例的车辆驾驶预警方法的步骤S410的具体流程 图。 图7示出了根据本申请的一个实施例的车辆驾驶预警方法的步骤S620的具体流程 图。 图8示出了根据本申请的一个实施例的车辆驾驶预警方法的步骤S520的具体流程 图。 图9示出了根据本申请的一个实施例的车辆驾驶预警方法的流程图。 图10示出了根据本申请的一个实施例的车辆驾驶预警装置的框图。 图11示出了适于用来实现本申请实施例的电子设备的计算机系统的结构示意图。











