
技术摘要:
本发明提供了一种手术机器人导航系统精度测量装置,该装置包括X轴移动机构、Y轴移动机构和Z轴移动机构;X轴移动机构、Y轴移动机构和Z轴移动机构均由导轨组件和驱动其运行的电机组成,X轴移动机构滑动设置在Y轴移动机构上;Z轴移动机构包括升降组件和驱动其运行的Z轴电 全部
背景技术:
随着机器人技术的发展,手术机器人技术逐渐成为国际机器人领域的前沿和研究 热点。手术机器人主要由控制台和操作臂组成,控制台由计算机系统、手术操作监视器、机 器人控制监视器、操作手柄和输入输出设备等组成。凭借超越人手的精确性、稳定性,手术 机器人近年来广泛应用于多学科的智能化手术。机器人手术系统是集多项现代高科技手段 于一体的综合体,达芬奇机器人作为现如今最广泛应用于临床的手术机器人系统,外科医 生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,手术时外科医生头靠 在视野框上,双眼接受来自不同摄像机的完整图像,共同合成术野的三维立体图,双手控制 操作杆,手部动作传达到机械臂的尖端,完成手术操作,从而增加操作的精确性和平稳性, 在世界微创外科领域是当之无愧的革命性外科手术工具。除了主从臂操控的被动系统,机 器人系统还可采用主动或者人机协同控制的半主动模式,外科医生参与监督,机器人独立 完成一项手术操作任务。这时手术机器人对操作对象的识别、定位即需要导航系统的帮助, 也就是说用导航系统来完成手术机器人眼的功能。 手术机器人的操作是否安全、精准至关重要,手术机器人导航系统的精度关系着 手术的成功与否,关系着病人的生命安全,然而目前现有技术并没有公开针对手术机器人 导航系统精度进行测量的装置。
技术实现要素:
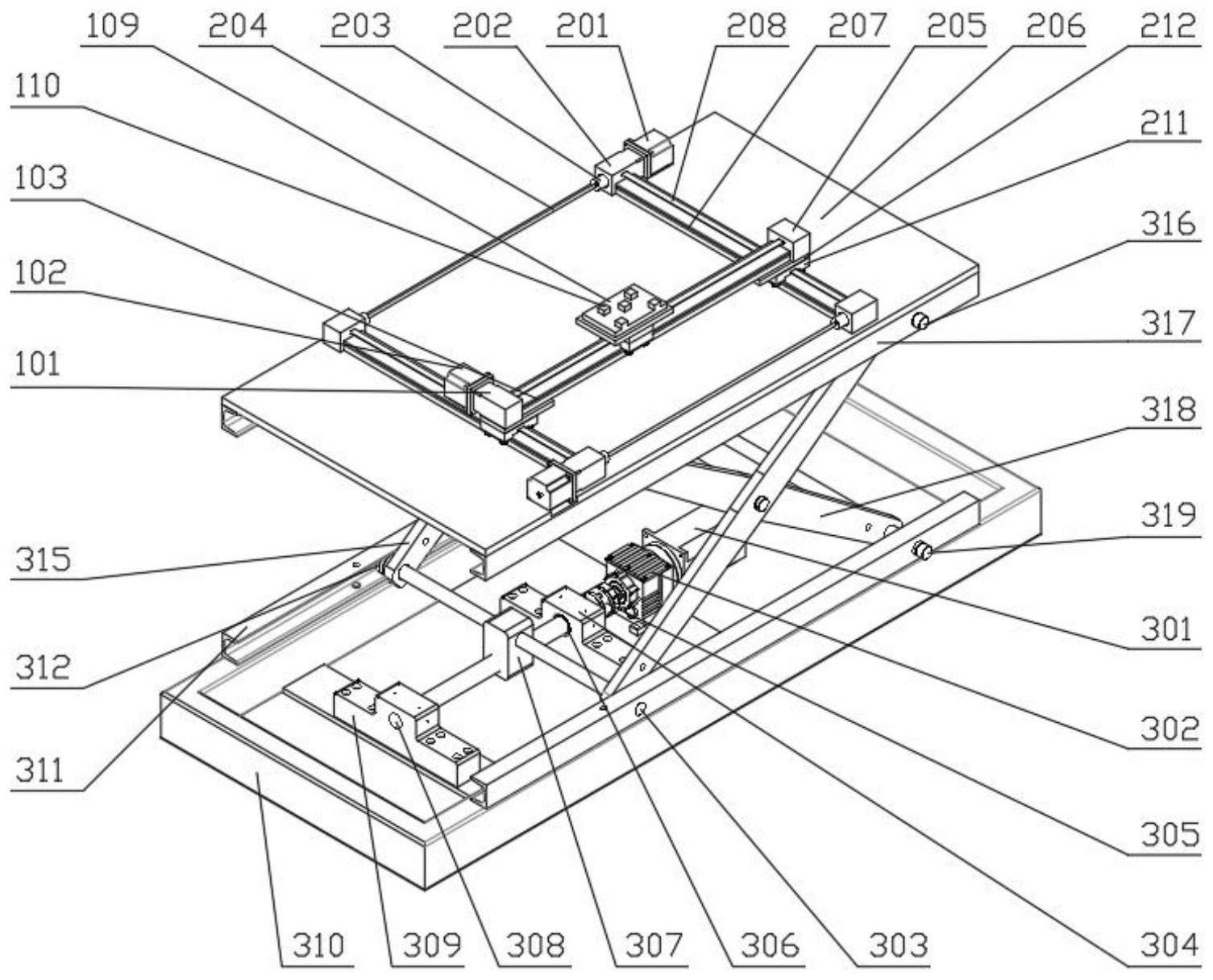
为了解决以上现有技术存在的问题,本发明的目的在于提供一种手术机器人导航 系统精度测量装置。 为了实现上述目的,本发明提供以下技术方案: 一种手术机器人导航系统精度测量装置,该装置包括X轴移动机构、Y轴移动机构 和Z轴移动机构;所述X轴移动机构包括X轴导轨组件和驱动其运行的X轴电机;所述Y轴移动 机构包括两个Y轴导轨组件和分别驱动其运行的两个Y轴电机,两个Y轴导轨组件通过一对 连接轴进行连接并呈中心对称固定在平面平台上,所述X轴移动机构滑动设置在Y轴移动机 构上;所述Z轴移动机构包括升降组件和驱动其运行的Z轴电机,所述Z轴移动机构固定在平 面平台的底部,并带动X轴移动机构和Y轴移动机构在Z轴方向移动;所述X轴导轨组件上滑 动设有被测物固定座。 进一步的,所述的X轴导轨组件包括X轴皮带、X轴滑杆和X轴滑块,所述X轴电机的 一端固定连接在X轴电机座上,电机轴穿设于X轴电机座内;所述X轴皮带的一端设置在X轴 电机的电机轴上,另一端设置在X轴底座上;所述X轴电机座和X轴底座之间于X轴皮带的底 部两侧设有两根平行的X轴滑杆,X轴滑块的底面四角分别设有一个圆柱滑块,所述X轴滑块 3 CN 111544120 A 说 明 书 2/4 页 穿设固定于X轴皮带上并通过圆柱滑块与两根X轴滑杆接触,X轴滑块在X轴皮带的带动下于 X轴滑杆上滑动。 进一步的,每个Y轴导轨组件包括Y轴皮带、Y轴滑杆和Y轴滑块,所述Y轴电机的一 端固定连接在Y轴电机座上,电机轴穿设于Y轴电机座内;所述Y轴皮带的一端设置在Y轴电 机的电机轴上,另一端设置在Y轴底座上;所述Y轴电机座和Y轴底座之间于Y轴皮带的底部 两侧设有两根平行的Y轴滑杆,Y轴滑块的底面四角分别设有一个圆柱滑块,所述Y轴滑块穿 设固定于Y轴皮带上并通过圆柱滑块与两根Y轴滑杆接触,Y轴滑块在Y轴皮带的带动下在Y 轴滑杆上滑动。 进一步的,每个Y轴导轨组件的Y轴滑块均通过Y轴垫块分别固定于X轴电机座和X 轴底座的底部。 进一步的,所述Z轴电机的电机轴一端固定在Z轴电机座上,所述Z轴电机通过电机 轴与大联轴器进行连接,所述大联轴器的末端与丝杆进行连接,所述丝杆的前后两端分别 通过丝杆轴承设置在前丝杆固定座和后丝杆固定座上;所述Z轴电机座、前丝杆固定座和后 丝杆固定座均固定于Z轴支撑架上。 进一步的,所述升降组件包括一对下滑轨、一对上滑轨、丝杆滑块、一对移动杆、升 降支架和一对固定杆;下滑轨固定于Z轴支撑架上并于丝杆的两侧与丝杆平行设置,丝杆滑 块滑动设置于丝杆上;所述升降支架包括两组由左升降杆和右升降杆交叉拼接的杆体,两 组杆体的交叉处通过升降连接杆进行连接,两组杆体的一侧分别通过上固定杆和下固定杆 进行连接,其另一侧分别通过上移动杆和滑块移动杆进行连接;所述滑块移动杆沿垂直于 丝杆的方向固定于丝杆滑块上,所述上移动杆和滑块移动杆的两端均通过移动杆轴承分别 滑动设置于上滑轨和下滑轨内;所述上固定杆和下固定杆的两端固定于上滑轨和下滑轨 上。 进一步的,所述Z轴移动机构通过一对上滑轨固定在平面平台的底部。有益效果: 本发明提供了一种手术机器人导航系统精度测量装置,该装置可以实现空间范围内三个自 由度运动,测量手术导航系统在手术范围空间内的最佳范围,能在真实手术环境下测量手 术机器人导航系统处于各个方位的精度,实现医用机器人在手术中的精准控制。通过测量 评估导航精度,评估手术环境中存在各种干扰的情况下手术机器人的实际精度,指导临床 使用机器人时通过摆位降低干扰源的影响,达到更好的机器人辅助手术效果。 附图说明 图1为本发明所述X轴移动机构的结构示意图。 图2为本发明所述X、Y轴移动机构装配后的结构示意图。 图3为本发明所述Z轴移动机构的结构示意图。 图4为本发明所述手术机器人导航系统精度测量装置的结构示意图。 图中:1、X轴移动机构;2、Y轴移动机构;3、Z轴移动机构;101、X轴电机;102、X轴电 机座;103、X轴滑杆;104、X轴滑块;105、连接块;106、圆柱滑块;107、X轴底座;108、X轴皮带; 109、被测物固定座;110、被测物紧固块;201、Y轴电机;202、Y轴电机座;203、联轴器;204、连 接轴;205、Y轴底座;206、平面平台;207、Y轴滑杆;208、Y轴皮带;209、Y轴左垫块;210、Y轴左 滑块;211、Y轴右垫块;212、Y轴右滑块;301、Z轴电机;302、Z轴电机座;303、滑块移动杆; 4 CN 111544120 A 说 明 书 3/4 页 304、前丝杆固定座;305、大联轴器;306、丝杆轴承;307、丝杆滑块;308、丝杆;309、后丝杆固 定座;310、Z轴支撑架;311、下滑轨;312、移动杆轴承;313、升降连接杆;314、上移动杆;315、 左升降杆;316、上固定杆;317、上滑轨;318、右升降杆;319、下固定杆。











