
技术摘要:
本发明公开了一种基于Dynamo的点云BIM自动化建模方法。基于Dynamo的点云BIM自动化建模方法包括以下步骤:步骤S1:求点云三维度的极值,计算点云包围盒表面积,再根据点云数量计算点云平均面密度;步骤S2:在选定方向对点云进行切片,切片数设置为输入型参数,并计算切 全部
背景技术:
点云数据是通过三维激光扫描仪或机器视觉技术获取的高精度、高密度、全数字 化的目标物表征数据。依靠逆向建模软件还能将这些空间离散点处理成三维网格模型,已 成熟应用于基础测绘,古建保护工程中。 BIM技术以三维建筑信息模型为核心,通过模型的分析、传递、共享,应用实现建筑 的全生命周期管理,是建筑业信息化发展的基础。BIM的核心建模软件revit设置了点云链 接功能,但是revit对点云的处理能力还处于显示阶段,不能直接对点云进行编辑和建模。 目前,基于点云生成的网格模型是一类表面模型,不是具有结构特性和属性特性 的通用BIM实体模型。模型可支持的BIM应用、分析存在很大的局限性。因此,基于点云数据 创建BIM模型也成为目前学者研究的热点,大致可以分为四个研究方向。 第一类通过提取点云特征线,生成二维矢量图,导入revit中进行手动建模。如吕 凤华等人对地铁车站进行扫描,提取点云特征线和相关参数进行BIM建模。高溪溪等人将古 建点云数据导入CAD提取特征线,生成标准图纸,通过图纸进行BIM建模。 第二类通过中间软件人机互动识别点云中的常规构件进行自动建模,并导出BIM 兼容格式。如刘立杨将点云导入PointSense for Revit拟合墙面,梁柱,再导入revit软件。 石力文等人将古建点云导入Scan for BIM,对一般构件拾取表面特征点进行建模。 第三类是对标准件采集点云再计算VFH(Viewpoint Feature Histogram)特征值, 建立标准件VFH库,通过特征值分类识别构件并调用族库模型。如苗亚哲等人建立了标准化 管线的VFH库。 第四类是通过二次开发对点云进行建模。如陈海涛研究了常规简单构件的点云几 何形状参数,利用revit二次开发(Visual Studio)实现点云的BIM重建。 值得注意的是,前两类是目前采用较多的方式,但是存在大量的人工作业,对模型 精度有一定的干扰。第三类使用面较窄,适用于MEP的建模。第四类是直接对点云进行编辑 和建模,人为干扰少但对编程要求高,而且其构建的模型不能在revit中进行二次编辑。
技术实现要素:
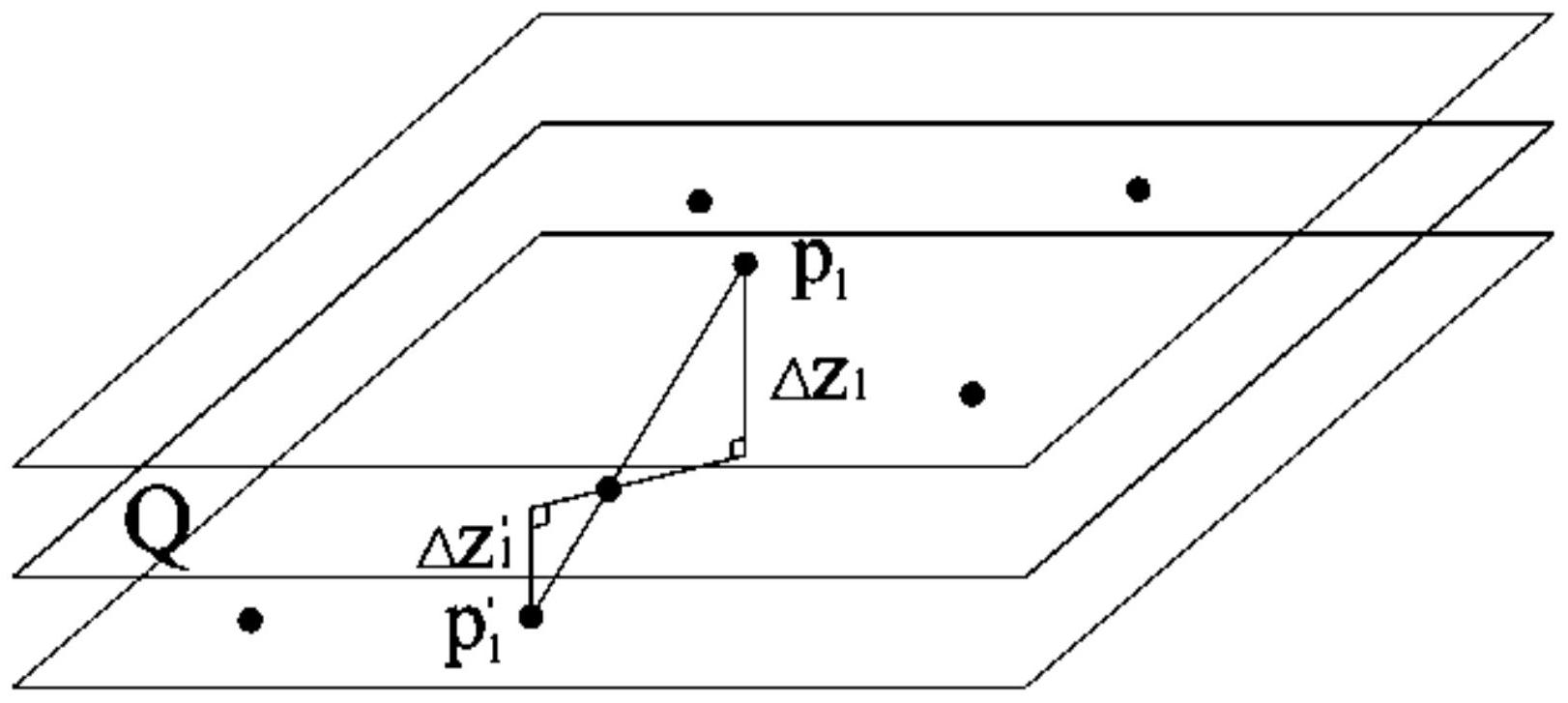
本发明针对现有技术的状况,克服以上缺陷,提供一种基于Dynamo的点云BIM自动 化建模方法。 本发明专利申请公开的基于Dynamo的点云BIM自动化建模方法,其主要目的在于, 充分利用revit内置的可视化编程平台(Dynamo)为“指挥棒”,对导入revit的点云进行分层 编辑、分段建模,从而实现点云无过渡地自动化构建实体模型,并赋予属性。 本发明专利申请公开的基于Dynamo的点云BIM自动化建模方法,其另一目的在于, 4 CN 111612911 A 说 明 书 2/8 页 充分利用revit管理菜单下的Dynamo可视化编程平台中的强大节点库以及实时互通revit 的特性,构建了点云数据显示、简化、切片、投影到实体建模的完整流程。 本发明专利申请公开的基于Dynamo的点云BIM自动化建模方法,其另一目的在于, Dynamo节点链保存后可为后续点云建模直接使用,其中切面数和阈值可自定义设置,可以 满足不同等级的建模精度要求。 本发明专利申请公开的基于Dynamo的点云BIM自动化建模方法,其另一目的在于, 适用于古建或现有建筑中存在一些形态复杂且无规则变化的形体或曲面构件,如盘龙云 柱,异形曲面幕墙,大型浮雕墙等,而采用传统的BIM建模很难达到理想的效果,通过点云创 建的表面网格模型是非BIM通用格式,不利用统一建筑信息标准和后续BIM应用分析,可以 采用本方法自动构建实体模型。 本发明采用以下技术方案,所述基于Dynamo的点云BIM自动化建模方法,包括以下 步骤: 步骤S1:求点云三维度的极值,计算点云包围盒表面积,再根据点云数量计算点云 平均面密度; 步骤S2:在选定方向对点云进行切片,切片数设置为输入型参数,并计算切平面上 下一个阈值范围内的点集; 步骤S3:将上下点集投影至切平面求交,通过离散点拟合得到个截切边界轮廓; 步骤S4:相邻边界轮廓进行放样融合创建分段实体; 步骤S5:分段实体组合,类别设置,材质设置,其余实例属性值设置。 根据上述技术方案,作为上述技术方案的进一步优选技术方案,所述基于Dynamo 的点云BIM自动化建模方法,还包括步骤S0: 步骤S0:输入点云,包括链接点云模型和点云文本数据两种输入方式,采用滑动条 方式输入重采样的距离阈值,通过“Point.ByCoordinates”节点显示点云。 根据上述技术方案,作为上述技术方案的进一步优选技术方案,步骤S1具体实施 为以下步骤: 步骤S1.1:点云的三维坐标被存储在三个列表中,即X列表,Y列表,Z列表,通过遍 历得到三个列表的极大极小值,组成极值坐标; 步骤S1.2:选用Dynamo节点库中的“Cuboid .ByCorners”节点,通过对角点创建点 云包围盒; 步骤S1.:利用公式1计算面密度,以作为后期使用阈值,其中公式1为: 其中:S为点云包围盒面积,δ为点云面密度,N为点云总量。 根据上述技术方案,作为上述技术方案的进一步优选技术方案,步骤S2具体实施 为以下步骤: 步骤S2.1:根据点云形态确定切片的基面; 步骤S2.2:通过滑动条控制切片数量n,利用公式2计算每个切片的Z值,其中公式2 5 CN 111612911 A 说 明 书 3/8 页 为: 步骤S2 .3:通过“PlanXY”节点创建一个XOY平面,并偏移至点云底部,选用 “Geometry.Translate”节点进行切平面布置; 步骤S2.4:设置点云密度δ为切片阈值,对切平面上下δ范围内的点进行增补处理, 切平面将阈值范围内的局部点云分为上下两部分点集p(zi δ)和p'(zi-δ)。 根据上述技术方案,作为上述技术方案的进一步优选技术方案,步骤S3具体实施 为以下步骤: 步骤S3.1:求与上部点p1欧式距离最短的下部点p′1,则两点连线与切平面的交点 为增补点; 步骤S3.2:根据相似原理,增补点的切平面坐标计算如公式3,依次计算得到每个 切平面的点集,其中公式3为: 步骤S3.3:通过“BoundingBox.Contain”节点判别盒内点集; 步骤S3.4:启用叉积计算上盒与下盒点集的直线长,取每个点的连缀最短值为上 下盒点对匹配关键码,匹配后的点对按公式3计算切平面投影点,得到切面点云。 根据上述技术方案,作为上述技术方案的进一步优选技术方案,步骤S3还具体实 施为以下步骤: 步骤S3.4:求取切面点集中的X向或Y向极值,即求得xmin,xmax,及对应的极点P1,P2, 则极点连线将点集分为2部分; 步骤S3.5:求取极点连线方程,方程式为 选择点集中 下一个点Pi(xi,yi),计算xi处P1P2连线上的点gl的yl值; 步骤S3.6:比较pi点和对应gl的y值,若yi>yl,则该点纳入列表1,若yi<yl,则该点 纳入列表2,重复步骤S3.4和步骤S3.5,完成所有点的分类; 步骤S3.7:对列表1中的点进行正向排序,列表2中的点进行逆向排序,即列表1的 点按X值从小到大排列,列表2的点反之,两个列表合并为一个列表,则得到一个完整有序的 切面点集; 步骤S 3 .8 :通过 C o d e B l o c k的循环语句判别点的归属表 ,选用节点 “NurbsCurve.ByControlPoints”拟合切面点,得到闭合的截面曲线。 根据上述技术方案,作为上述技术方案的进一步优选技术方案,步骤S4和步骤S5 具体实施为以下步骤: 步骤S4.1:通过“Solid.ByLoft”节点,输入横截面闭合曲线放样创建实体; 步骤S5.1:通过“Springs.FamilyInstance.ByGeometry”节点为模型赋予属性性 6 CN 111612911 A 说 明 书 4/8 页 质。 根据上述技术方案,作为上述技术方案的进一步优选技术方案,步骤S5.1中,属性 性质包括但不限于材质、类别、名称。 本发明公开的基于Dynamo的点云BIM自动化建模方法,其有益效果在于,充分利用 revit内置的可视化编程平台(Dynamo)为“指挥棒”,对导入revit的点云进行分层编辑、分 段建模,从而实现点云无过渡地自动化构建实体模型,并赋予属性。 附图说明 图1A是本发明的点云显示示意图(兔子)。 图1B是本发明的点云简化示意图(兔子)。 图1C是本发明的点云简化示意图(石墩)。 图2是本发明的点云包围盒示意图(石墩)。 图3是本发明的点云切片示意图(兔子)。 图4是本发明的点云切面阈值包围盒示意图(石墩)。 图5是本发明的切平面点云投射示意图。 图6A是本发明的点集叉积计算示意图。 图6B是本发明的切面点云示意图(兔子)。 图6C是本发明的切面点云示意图(石墩)。 图7是本发明的点集有序化示意图。 图8A是本发明的实体模型图(兔子)。 图8B是本发明的实体模型图(石墩)。 图8C是本发明的具有材质的模型示意图(石墩)。











