
技术摘要:
本发明公开了一种分布式机械臂系统鲁棒预设性能控制方法,其步骤包括:步骤一,建立分布式机械臂系统的数学模型;步骤二,设计预设性能约束;步骤三,设计分布式鲁棒预设性能控制器。本控制方法不依赖非线性模型、复杂度低,不仅实现了在未知非线性和外界干扰下的多个 全部
背景技术:
在实际工程中,往往需要多个结构简单的机械系统共同完成一个复杂任务。多个 机械系统协同工作一方面可以大大提高系统的自由度和可靠性,另一方面也有利于降低受 控系统的成本。 现有针对多个机械系统的分布式控制有许多研究成果,例如基于滑模控制技术的 有限时间分布式控制方法、基于神经网络的自适应分布式控制、基于事件驱动的分布式控 制等。为了实现对分布式控制系统瞬态与稳态性能的预设,现有技术针对单输入单输出非 线性系统,利用神经网络构建了分布式自适应预设性能控制方法,针对存在随机干扰的欧 拉-拉格朗日系统进一步研究了基于神经网络近似的分布式自适应预设性能控制。以上控 制虽然有效,但是存在两点局限:首先,神经网络的使用必然涉及到复杂的权重参数调参整 定问题,当神经网络的层数和结点增加时,该问题更加复杂,且需要耗费大量计算资源,不 利于控制律的在线使用;其次,神经网络近似非线性仅在初始定义的紧集范围内有效,如何 保障网络学习的有效性是一个难以解决的问题。
技术实现要素:
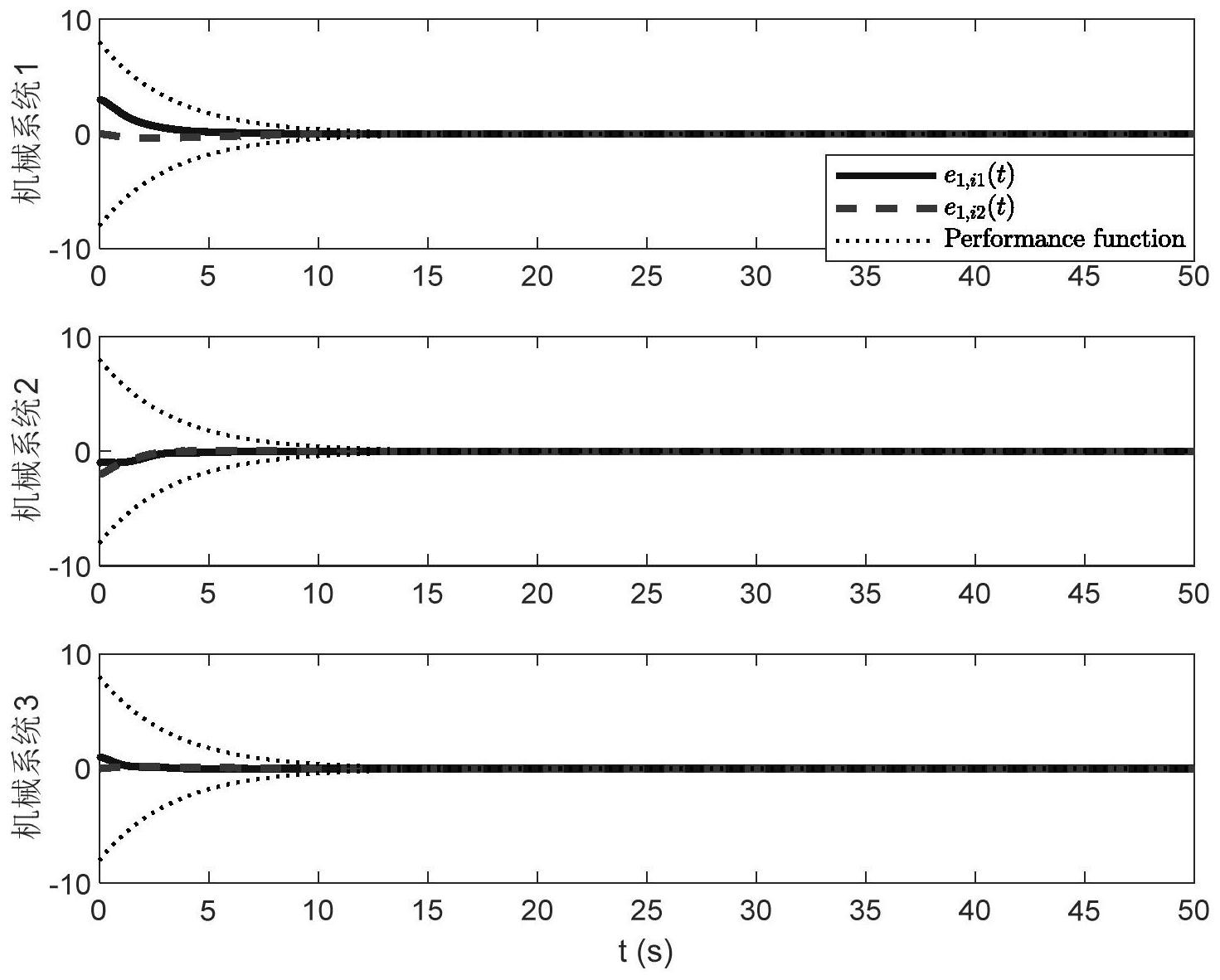
针对上述现有技术存在的问题,本发明提供一种分布式机械臂系统鲁棒预设性能 控制方法,该控制方法不依赖非线性模型、复杂度低,不仅能够实现在未知非线性和外界干 扰下的多个机械臂关节角度稳定和追踪控制,且能够实现主从机械系统保瞬态与稳态性能 的追踪控制。 为了实现上述目的,本发明提供一种分布式机械臂系统鲁棒预设性能控制方法, 包括如下步骤: 步骤一,建立分布式机械臂系统的数学模型: 具有欧拉-拉格朗日多输入多输出特性的分布式机械臂系统,其第i个形式如下: 其中: 为第i个机械臂系统的n维位置向量, 分 别为速度和加速度向量; 分别为系统惯性 矩阵、科氏力和离心力矩阵以及重力引力相关矢量; 和 分别为系统的控制 输入变量和未知的外部扰动; 步骤二,设计预设性能约束: 定义的性能约束如下所示: 4 CN 111590561 A 说 明 书 2/6 页 其中,κ∈[0,1]为常量,ρ(t)为性能函数, ( ρ0>ρ∞>0为常量);为降低控制器设计的复杂度,引入如下转化函数S(·)对性能函数进行 同胚映射转化,即: 其中,ε(t)为转化后误差,其微分形式为: 其中,α(t)为定义的标准追踪误差,α(t)=e(t)/ρ(t),其范围满足: 步骤三,设计分布式鲁棒预设性能控制器: 1)定义第i(i=1,2,...,N)个从结点的广义位置和速度追踪误差为: 定义整个主从结点跟踪误差为: 其中: z1,i=pi-p0, 定义第i(i=1,2,...,N)个从结点的伴随状态si,即: si=e2,i λie1,i (7), 其中, 为待设计的对角正定矩阵; 2)对位置追踪误差e1 ,i进行相应性能约束包络设计,同一从节点拥有同一性能函 5 CN 111590561 A 说 明 书 3/6 页 数,伴随状态相应的性能约束包络为: 其中, i=1,2,...,N,r=1,2,...,n; 3)设计第i(i=1,2,...,N)个从结点的低复杂度控制器,形式如下: τi=-K1,isi-K2,iζiεe,i (9), 其中, 为对称正定的控制增益;从结点伴随状态si定义如式(7)所 述;转换误差εe,i满足如下形式: 其中,ζi(t)=diag{ζi,1(t) ,ζi,2(t) ,...,ζi,n(t)}, 是伴随变量。 本控制方法针对多个机械系统在未知非线性模型和外界干扰下,通过建立分布式 机械臂系统的数学模型,并在此基础上进一步设计预设性能约束,以保障其瞬态与稳态性 能,最终设计出分布式鲁棒预设性能控制器,该控制方法不依赖非线性模型、复杂度低,不 仅实现了在未知非线性和外界干扰下的多个机械臂关节角度稳定和追踪控制,且实现了主 从机械系统保障其瞬态与稳态性能的追踪控制;本预设性能控制方法不仅可以解决单个机 械系统的轨迹跟踪控制问题,同时也能够解决多个机械系统的协同控制问题,进一步丰富 了预设性能控制方法的适用对象,为解决更多实际机械系统控制问题提供了坚实理论与方 法基础。 附图说明 图1是主从机械臂系统之间的信息拓扑图,其中0表示主机械臂系统,1~3表示从 机械臂系统; 图2是稳定控制时从机械臂系统关节角度追踪误差图; 图3是稳定控制时从机械臂系统关节角速度追踪误差图; 图4是稳定控制时从机械臂系统关节角度输出图; 图5是稳定控制时从机械臂系统控制输入/N.m图; 图6是追踪控制时从机械臂系统关节角度追踪误差图; 图7是追踪控制时从机械臂系统关节角速度追踪误差图; 图8是追踪控制时从机械臂系统关节角度输出图; 图9是追踪控制时从机械臂系统控制输入/N.m图。











