
技术摘要:
本发明公开了一种光谱推扫与位姿同步关联的水质监测装置及方法,包括设置在水面运载平台上的多轴旋转支架,还包括姿态主控模块和光谱探测模块;姿态主控模块包括主控MCU和IMU姿态传感器,主控MCU用于读取IMU姿态传感器的传感信息;IMU姿态传感器用于实时采集姿态信息; 全部
背景技术:
目前水质监测装置在水文环境、农业、渔业、质检监测等方面应用极为广泛,是检 测水质状态的主要装备。而用于水质监测的传感器也品类极多,常用的水质传感器包括ORP 传感器、浊度传感器、PH传感器、电导率传感器以及余氯传感器等,不同行业的水质检测需 求也千差万别,所需要检测出的水质参量也各不相同,因此也需要配备不同的传感器。这样 就使得检测设备配置工作繁杂,还需要配置或携带额外的通信/电源的通信及接口,较难实 现单一设备的多变量水质状态监测。此外,利用常规水质传感器对开阔水域进行水质检测 需要借助船只或者搭建特定的水域观测站,需要繁重的装备设计与制造过程;同时,由于装 备繁乱给集成系统的小型化增加了一定难度。
技术实现要素:
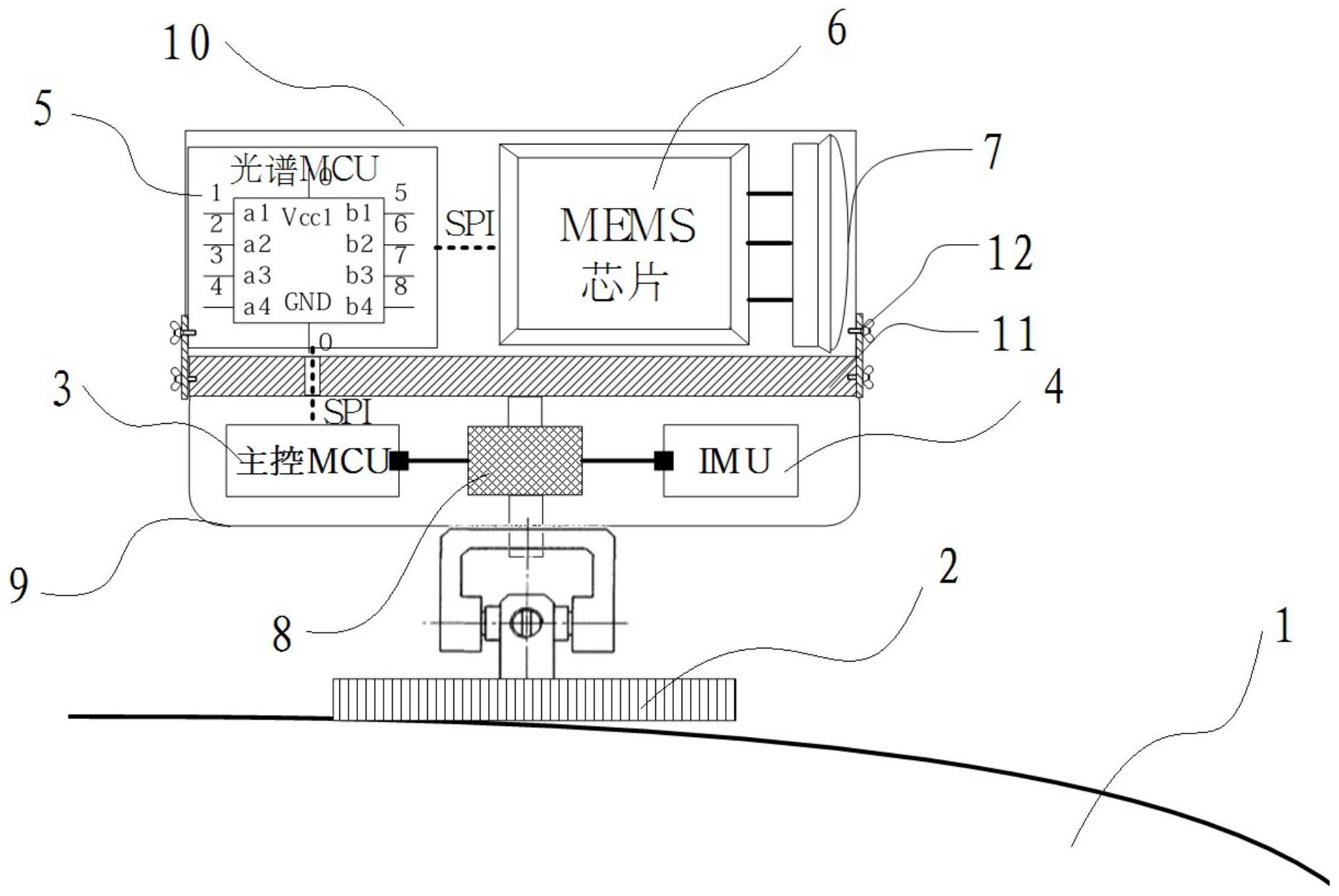
本发明的目的在于,提供一种光谱推扫与位姿同步关联的水质监测装置及方法, 其能通过单点MEMS光谱探测器与IMU姿态传感器的同步融合进行多变量水质监测,还能通 过光谱探测器可见光谱信息的深度学习,实现水面漂浮物与近岸水域暗礁的检测与识别, 有效避免了安全事故的发生。 为实现上述目的,本发明采用的技术方案在于,一种光谱推扫与位姿同步关联的 水质监测装置,包括设置在水面运载平台上的多轴旋转支架,还包括姿态主控模块和光谱 探测模块; -所述姿态主控模块包括主控MCU和IMU姿态传感器,所述主控MCU用于读取IMU姿 态传感器的传感信息;IMU姿态传感器用于实时采集姿态信息; -光谱探测模块包括光谱MCU、MEMS光谱探测芯片及光学透镜,所述光谱MCU用于 对MEMS光谱探测芯片的探测数据定时采集,并进行水质状态的光学单点分析;所述MEMS光 谱探测芯片用于探测光谱,所述光学透镜用于配合MEMS光谱探测芯片进行光谱探测。 在本专利中由于光谱的波长不同,MEMS光谱探测芯片对于其定向感知的光谱特性 也不一样,比如波长为850μm的荧光光谱,本专利的MEMS光谱探测芯片最多只能采集12个通 道的光谱。 作为优选,所述姿态主控模块还包括压电陶瓷驱动器,所述主控MCU、IMU姿态传感 器和压电陶瓷驱动器形成于姿态主控机械外壳内,且主控MCU、IMU姿态传感器和压电陶瓷 驱动器之间分别通过RS232串口连接。 作为优选,所述光谱MCU和MEMS光谱探测芯片之间通过SPI进行通信,所述MEMS光 谱探测芯片的输出端与光学透镜连接,所述光谱MCU与主控MCU之间通过SPI或者I2C进行通 信;且所述光谱MCU、MEMS光谱探测芯片及光学透镜形成于光谱探测外壳内。 4 CN 111610154 A 说 明 书 2/5 页 作为优选,所述光谱探测外壳固定在承压板上,所述承压板活动连接在姿态主控 机械外壳上,所述姿态主控机械外壳固定在多轴旋转支架上。 所述姿态主控模块和光谱探测模块分别集成于相应的机械外壳内,安装于多轴旋 转支架上,在本专利中,多轴旋转支架可在复杂水面波动的情况下实现光学探测的机械防 抖,承压板与压电陶瓷驱动器相互作用,压电陶瓷驱动器用于感知光谱探测模块的运动轨 迹。 作为优选,所述主控MCU通过同步时序脉冲进行光谱探测信息与IMU姿态信息的同 步采集。 作为优选,所述多轴旋转支架安装在水面运载平台的顶部,其前端不得被遮挡。 作为优选,所述态主控模块和光谱探测模块通过深度学习对水面暗礁、垃圾进行 分类识别。 同时,本发明还提供了一种光谱推扫与位姿同步关联的水质监测方法,包括: (1)将姿态主控机械外壳和光谱探测外壳通过多轴旋转支架固定在水面运载平台 上,在水面无波动的情况下,校正光谱探测模块的光学探测参数; (2)主控MCU通过RS232串口读取并发送IMU姿态信息,并通过SPI总线通信给MEMS 光谱探测芯片发送脉冲时序信号,驱动所述光谱MCU进行光谱单点探测,实现姿态主控模块 的姿态信息与光谱探测模块的信息同步; (3)所述光谱MCU根据发送的脉冲时序信号,实时按需读取MEMS光谱探测芯片的信 息,MEMS光谱探测芯片实时将相应时间的水质光谱探测数据返回; (4)所述主控MCU根据同步采集到的IMU姿态传感器的姿态信息与光谱探测信息, 将IMU姿态信息检测的平台位姿误差δ与光谱线束与水面具体交点处的水面推扫幅值(δh δl)相对应,即可通过所述光谱单点探测器感知当前点的水质状态参数; (5)循环步骤(2)~(4),不断进行水面扫描,将所有扫描过的点集中在时域内扩展 即可形成一条水面推扫曲线,进而获取一个微小的带形区域内的水质状态参数; (6)通过水面运载平台的运动,结合步骤(5)中获取的条带区域水质参数,即可获 取整个平面内的水质状态参数; (7)利用所述主控MCU,每隔设定时间获取某一部分平面的水质状态参数,如果某 一区域内的水质状态参数在正常范围之内,即再次通过所述光谱单点探测器进行水质状态 检测; (8)如果某一区域内的水质状态参数超出正常水质参数区域范围之外,即可通过 深度学习方法对当前区域的性状进行分类识别,即可识别出水面暗礁、垃圾漂浮物; (9)重复以上步骤实现水质状态的光谱单点探测,并可实现水面暗礁、垃圾漂浮物 的检测。 作为优选,在步骤(6)中,水面运载平台的运动状态包括匀速运动或者变速运动; 且监控的水质状态参数包括:氨氮、PH值、COD、电导率、ORP和温度。 作为优选,在步骤(8)中,对于水面不同漂浮物或者暗礁其分类标准不同,具体如 下:根据水面暗礁及垃圾漂浮物在不同波段光谱下呈现的图像信息进行特征提取,进而根 据提取的特征对其进行分类,以监测当前区域所形成的光谱图形为暗礁或者垃圾或者是一 般水体。识别用的数据源包括RGB图像、近红外波段光谱图像、远红外波段光谱图像。 5 CN 111610154 A 说 明 书 3/5 页 本发明的有益效果:本发明通过光谱单点推扫与IMU位姿同步关联的方式实时补 偿由于复杂水面波动造成的光谱近地探测误差;同时结合光谱单点推扫与平台的运动规 律,使光谱探测到某一特定水面区域的水质状态参数。本专利仅需要极低成本的MEMS光谱 探测器即可实现水质状态单点检测,结合水面运载平台的运动可进一步实现水面暗礁、垃 圾漂浮物等异物的检测,避免了水面运载平台在自主移动时触礁,防止了安全事故发生。 附图说明 为了更清楚地说明本发明的技术方案,下面将对实施例或现有技术描述中所需要 使用的附图作简单地介绍。 图1为本发明的结构示意图; 图2为本发明的安装结构示意图; 图3为本发明光谱单点推扫与位姿同步关联方法示意图; 图中:1.水面运载平台,2.多轴旋转支架,3.主控MCU,4.IMU姿态传感器,5.光谱 MCU,6.MEMS光谱探测芯片,7.光学透镜,8.压电陶瓷驱动器,9.姿态主控机械外壳,10.光谱 探测外壳,11.承压板,12.机械紧固装置。











