
技术摘要:
本发明涉及一种基于幅度特征统计的车载毫米波雷达遮挡检测方法,包括:分别获取异物直接覆盖条件下和无异物直接覆盖条件下的毫米波雷达多个通道的时域回波信号的FFT的幅度变化特征统计分析,根据该FFT的幅度变化特征统计分析结果与当前时刻的毫米波雷达多个通道的时域 全部
背景技术:
车载毫米波雷达作为高级驾驶辅助系统(Advanced DrivingAssistance System ADAS)重要的传感器之一,已成为ADAS系统中不可缺少的一部分,并且随着自动驾驶技术的 不断发展,车载毫米波雷达将会拥有巨大的市场需求。通过其超越人类本身的感知能力,不 仅可以通过灯光预警等方式提醒驾驶员注意潜在威胁,甚至可以参与车身控制,规避潜在 危险。 但是,车载毫米波雷达在装车使用过程中,毫米波雷达正前方的第二表面(车身或 车标)表面容易被积雪、泥土或其他物体覆盖,即表征为雷达被遮挡,其结果为雷达对目标 的检测性能受损,严重遮挡时,雷达对目标的检测功能甚至会直接失效,使雷达系统不能为 本车提供或提供错误的环境感知信息与决策,存在行车危险。 针对此问题,现有的大多遮挡检测算法的实现方法为,从信号处理角度,通过观察 雷达对环境目标做CFAR(Constant False Alarm Rate)检测的直观结果,进而判断毫米波 雷达是否被遮挡,在一定情况下,这种方法确实有效,但在绝对空旷环境里或毫米波雷达紧 邻目标物体时,易产生遮挡检测误报警。 而即使是在绝对空旷环境里或毫米波雷达紧邻目标物体时,雷达在有无遮挡条件 下,其时域信号的快速傅里叶变换(Fast Fourier Transformation,FFT)的幅值变化较大 的点的数量均有明显差异。 基于此,本发明以应用FMCW的车载毫米波雷达为研究基础,提出通过对其各通道 信号的FFT的幅度变化特征进行统计分析的方法,对毫米波雷达的遮挡情况进行判断,从而 实现车载毫米波雷达的遮挡自诊断功能。
技术实现要素:
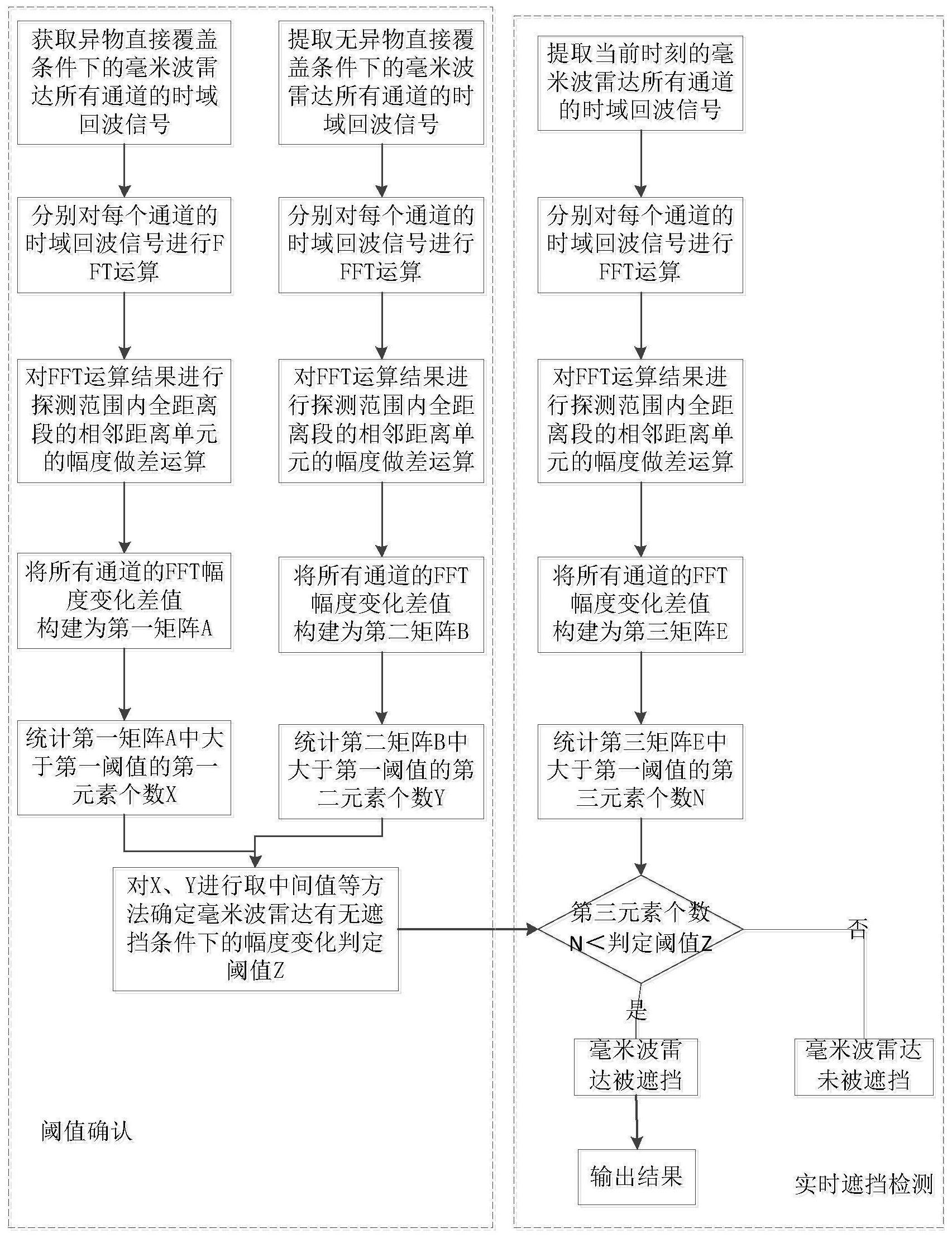
本发明为克服上述现有技术所述的不足,提供一种基于幅度特征统计的车载毫米 波雷达遮挡检测方法。 为解决上述技术问题,本发明的技术方案如下: 一种基于幅度特征统计的车载毫米波雷达遮挡检测方法,包括如下步骤: 分别获取异物直接覆盖条件下的毫米波雷达多个通道的时域回波信号的FFT幅度 变化差值所构建成的第一矩阵和无异物直接覆盖条件下的毫米波雷达多个通道的时域回 波信号的FFT幅度变化差值所构建成的第二矩阵; 分别根据第一矩阵和第二矩阵获取表征毫米波雷达有异物直接覆盖和无异物直 接覆盖情况下的FFT幅度变化特征的数值信息,并根据表征毫米波雷达有异物直接覆盖和 无异物直接覆盖情况下的FFT幅度变化特征的数值信息以确定毫米波雷达有无遮挡条件下 4 CN 111580109 A 说 明 书 2/5 页 的幅度变化判定阈值; 获取当前时刻的毫米波雷达多个通道的时域回波信号的FFT幅度变化差值所构建 成的第三矩阵,根据第三矩阵获取体现当前实际毫米波雷达遮挡状态下FFT幅度变化特征 的数值信息; 判断第三矩阵获取体现当前实际毫米波雷达遮挡状态下FFT幅度变化特征的数值 信息是否小于毫米波雷达有无遮挡条件下的幅度变化判定阈值,若是,则判断毫米波雷达 被遮挡,否则,毫米波雷达未被遮挡。 进一步的,作为优选技术方案,第一矩阵的获取具体包括: 提取异物直接覆盖条件下的毫米波雷达多个通道的时域回波信号; 分别对每个通道的时域回波信号进行FFT运算,并对FFT运算结果进行探测范围内 全距离段或一定距离段的相邻距离单元的幅度做差运算; 将多个通道的FFT幅度变化差值构建为第一矩阵。 进一步的,作为优选技术方案,第一矩阵的获取具体包括: 其特征在于,第二矩阵的获取具体包括: 提取无异物直接覆盖条件下的毫米波雷达多个通道的时域回波信号; 分别对每个通道的时域回波信号进行FFT运算,并对FFT运算结果进行探测范围内 全距离段或一定距离段的相邻距离单元的幅度做差运算; 将多个通道的FFT幅度变化差值构建为第二矩阵。 进一步的,作为优选技术方案,第一矩阵的获取具体包括: 有异物直接覆盖情况下的FFT幅度变化特征的数值信息的获取具体包括: 将第一矩阵中的各元素与第一阈值进行比较,提取第一矩阵中大于第一阈值的第 一元素个数,所述第一元素个数即为有异物直接覆盖情况下的FFT幅度变化特征的数值信 息。 进一步的,作为优选技术方案,第一矩阵的获取具体包括: 无异物直接覆盖情况下的FFT幅度变化特征的数值信息的获取具体包括: 将第二矩阵中的各元素与第一阈值进行比较,提取第二矩阵中大于第一阈值的第 二元素个数,所述第二元素个数即为无异物直接覆盖情况下的FFT幅度变化特征的数值信 息。 进一步的,作为优选技术方案,第一矩阵的获取具体包括: 毫米波雷达有无遮挡条件下的幅度变化判定阈值的确定具体包括: 分别对有异物直接覆盖和无异物直接覆盖情况下的FFT幅度变化特征的数值信息 取中间值,根据中间值确定毫米波雷达有无遮挡条件下的幅度变化判定阈值。 进一步的,作为优选技术方案,第一矩阵的获取具体包括: 第三矩阵的获取具体包括: 提取当前时刻的毫米波雷达多个通道的时域回波信号; 分别对每个通道的时域回波信号进行FFT运算,并对FFT运算结果进行探测范围内 全距离段或一定距离段的相邻距离单元的幅度做差运算; 将多个通道的FFT幅度变化差值构建为第三矩阵。 进一步的,作为优选技术方案,第一矩阵的获取具体包括: 5 CN 111580109 A 说 明 书 3/5 页 体现当前实际毫米波雷达遮挡状态下FFT幅度变化特征的数值信息的获取具体包 括: 将第三矩阵中的各元素与第一阈值进行比较,提取第三矩阵中大于第一阈值的第 三元素个数,所述第三素个数即为体现当前实际毫米波雷达遮挡状态下FFT幅度变化特征 的数值信息。 进一步的,作为优选技术方案,第一矩阵的获取具体包括: 还包括将毫米波雷达被遮挡的判断结果进行相应输出。 进一步的,作为优选技术方案,所述第一阈值根据实际的数据检测结果,并以最大 程度地体现毫米波雷达有遮挡与无遮挡状态下的FFT幅度变化特征确定。 与现有技术相比,本发明技术方案的有益效果是: 本发明通过对毫米波雷达的各通道时域回波信号的FFT的幅度变化特征进行统计 分析,以对毫米波雷达的遮挡情况进行判断,从而有效地实现了车载毫米波雷达的遮挡状 况检测,同时,该方法对算力要求较低,在保证了车载毫米波雷达系统对环境的实时感知的 同时,也满足车载毫米波雷达自诊断功能的实时性。 附图说明 图1为本发明方法步骤流程图。 图2为本发明有无遮挡状态下的幅度特征统计情况示意图。 附图仅用于示例性说明,不能理解为对本专利的限制;为了更好说明本实施例,附 图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说, 附图中某些公知结构及其说明可能省略是可以理解的;相同或相似的标号对应相同或相似 的部件;附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制。











