
技术摘要:
一种重物上下车搬运装置,包括底部分别设置有轮子的前后机械提升机构、设置在前后机械提升机构之间的车架,固定于车架上的九轴姿态模块,安装在车架中前部的落地运输支撑轮左、落地运输支撑轮右,安装在车架后端中间位置处的落地运输方向轮。本发明的装置可以实现在单 全部
背景技术:
在日常的生产生活中货物的运输、卸载、搬运工作每时每刻都在发生,有大量的搬 运工作受限制于时间、空间、经济等多种因素无法实现灵活方便的搬运作业,通常遇到此种 情景,大多靠多人力的操作进行搬卸作业,但是遇到人力协调困难时,此种搬运作业就局限 性很大,所以急需要一种能够灵活实现上下车搬运货物的装备解决此种问题。
技术实现要素:
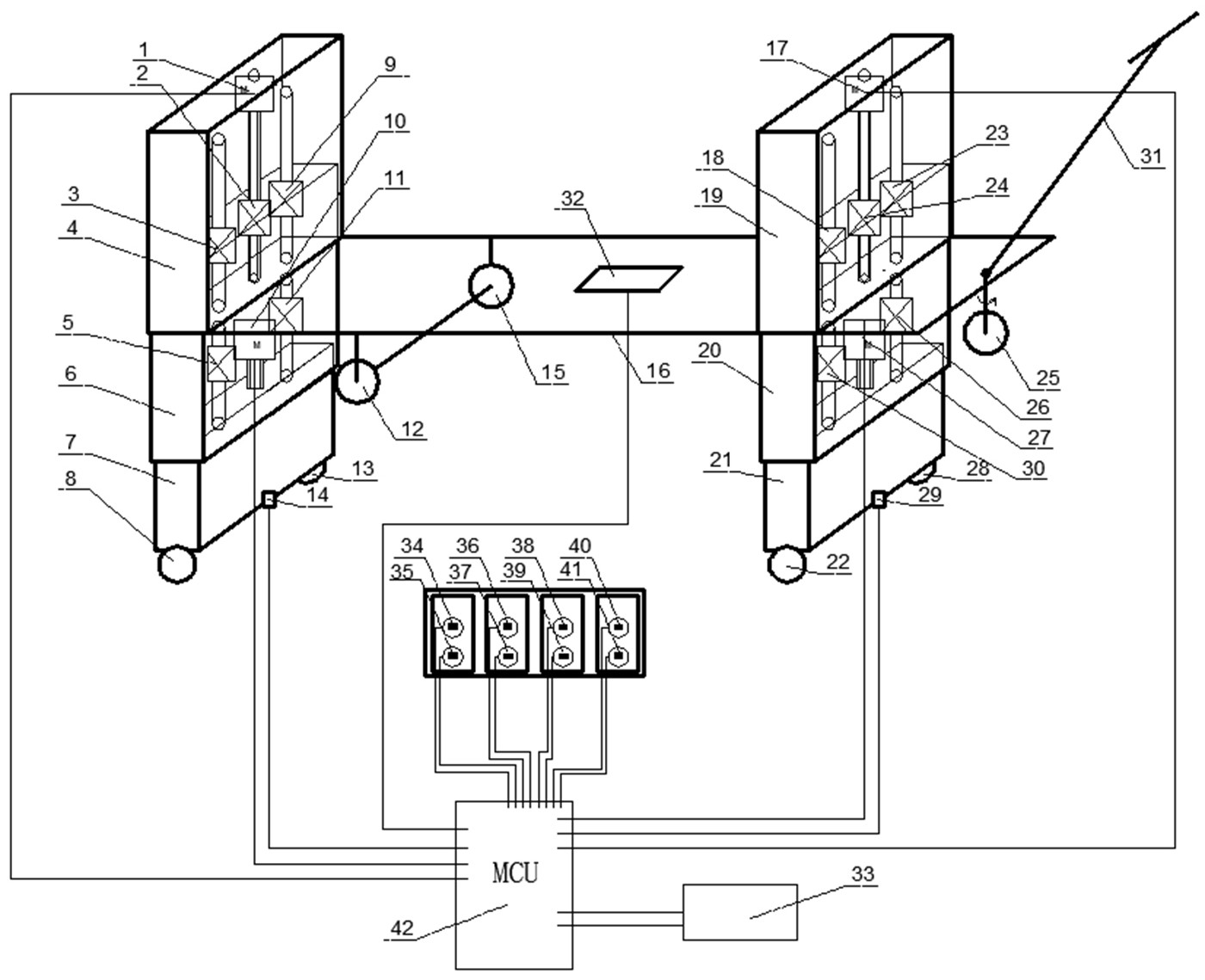
本发明的目的正是针对上述现有技术中所存在的不足之处而提供一种重物上下 车搬运装置,本发明的装置可以实现在单人进行操作的条件下,可实现对一定重量的重物 进行卸货搬运作业,可广泛应用于运输、物流、生产制造过程及需要重物频繁从高处搬运的 领域,以及可以配套安装于展示设备、运输设备上等需要便携式搬运的产品上作为关键部 件使用。 本发明的目的可通过下述技术措施来实现: 本发明的重物上下车搬运装置包括以保持和地面平行的角度固定于车架上的九轴姿 态模块,安装在车架中前部的落地运输支撑轮左、落地运输支撑轮右,安装在车架后端中间 位置处的落地运输方向轮;在车架前端连接有前侧上部传动护罩;通过设置在前侧上部传 动护罩内的前侧上部升降电机、前侧上部传动丝杆以及前侧上部左传动滑杆和前侧上部右 传动滑杆安装在前侧上部传动护罩底部的前侧中部传动护罩;通过设置在前侧中部传动护 罩内的前侧下部升降电机、前侧下部传动护罩与前侧下部左传动滑杆安装在前侧中部传动 护罩底部的前侧下部传动护罩;在车架后端连接有后侧上部传动护罩;通过设置在后侧上 部传动护罩内的后侧上部升降电机、后侧上部传动丝杆以及后侧上部左传动滑杆和后侧上 部右传动滑杆安装在后侧上部传动护罩底部的后侧中部传动护罩;通过设置在后侧中部传 动护罩内的后侧下部升降电机、后侧下部右传动滑杆和后侧下部左传动滑杆安装在后侧中 部传动护罩底部的后侧下部传动护罩;在前侧下部传动护罩以及后侧下部传动护罩底部中 间位置以垂直于地面的方式安装分别安装有前侧机械提升机构位置传感器和后侧机械提 升机构位置传感器;在在前侧下部传动护罩底部安装有前侧机械提升机构左轮、前侧机械 提升机构右轮,在后侧下部传动护罩底部安装有后侧机械提升机构左轮、后侧机械提升机 构右轮;前侧上部升降电机、前侧下部升降电机、前侧机械提升机构位置传感器、九轴姿态 模块、后侧上部升降电机、后侧下部升降电机、后侧机械提升机构位置传感器、电池供电模 块、前侧提升按钮、前侧下降按钮、后侧提升按钮、后侧下降按钮、整体提升按钮、整体下降 3 CN 111547538 A 说 明 书 2/3 页 按钮、急停按钮、模式切换开关通过相应的线缆连接到主控板MCU相应接口。 本发明中落地运输方向轮能够实现绕转轴360度的旋转。 本发明通过机械结构的顺序变换,配合传感器信号的综合判断完成整个搬运装置 从车体平台的卸货过程;其中卸货过程操作流程如下:将包含前侧上部传动护罩的车头部 分朝向车体外侧,推动装置,当前侧机械提升机构左轮伸出车厢部分之后,点击前侧下降按 钮,主控板检测到前侧下降按钮信号之后,采集前侧机械提升机构距离探测传感器信号和 九轴姿态模块信号之后做综合判断,如果判断车体达到水平状态并且前侧机械提升机构左 轮伸出车厢部分,此时主控板控制前侧上部升降电机和前侧下部升降电机同时工作,驱动 前侧伸缩臂超地面方向伸缩,当前侧机械提升机构距离探测传感器探测到前侧机械提升机 构左轮触地之后,系统停止控制前侧伸缩臂的运动;此时继续向车厢外侧推动重物上下车 搬运装置,当后侧机械提升机构左轮伸出轿厢之外,并且落地运输方向轮维持在车厢之上 时,点击后侧下降按钮,主控板检测到后侧下降按钮信号之后,采集后侧机械提升机构位置 传感器信号和九轴姿态模块信号之后做综合判断,如果判断车体达到水平状态并且后侧机 械提升机构左轮伸出车厢部分,此时主控板控制后侧上部升降电机和后侧下部升降电机同 时工作,驱动后侧伸缩臂超地面方向伸缩,当后侧机械提升机构位置传感器探测到后侧机 械提升机构左轮触地之后,系统停止控制前侧伸缩臂的运动;此时重物搬运平台已经平稳 落地,继续推动重物搬运平台驶出厢体,完成重物从车厢上的搬运过程;重物上下车平台的 上车过程和下车过程刚好相反,上车时点击整体提升按钮,控制重物上下车平台提升到车 体轿厢的高度,推动搬运平台将落地运输方向轮)放置到轿厢平台上之后,点击后侧提升按 钮,后侧提升机够整体向上提升,到后侧提升机构全部收缩完成之后,向轿厢内部推动搬运 装置,到落地运输支撑轮左和落地运输支撑轮右接触到轿厢平台之后,点击前侧提升按钮, 主控板检测到此按钮信号之后,控制前侧提升机够整体向上提升,到前侧提升机构全部收 缩完成之后,推动整体运输装置进入车体轿厢,完成整个装置的上车操作过程; 本发明的有益效果如下: 本发明采用机械提升动力装置、距离传感器模块、九轴传感器模块、单片机控制系统相 结合;控制系统通过对机械装置的前后逻辑控制,及传感器信号的综合判断,实现整个上下 车搬运装置的相应功能的实现,整体操作过程简单、便捷、轻松,可以轻松的实现重物从车 厢平台的上车和下车动作,具有很高的市场应用价值。 附图说明 图1为本发明的结构示意图。 图中序号:1前侧上部升降电机,2前侧上部传动丝杆,3前侧上部左传动滑杆,4前 侧上部传动护罩,5前侧下部左传动滑杆,6前侧中部传动护罩,7前侧下部传动护罩,8前侧 机械提升机构左轮,9前侧上部右传动滑杆,10前侧下部升降电机,11前侧下部右传动滑杆, 12落地运输支撑轮左,13前侧机械提升机构右轮,14前侧机械提升机构距离探测传感器,15 落地运输支撑轮右,16车架,17后侧上部升降电机,18后侧上部左传动滑杆,19后侧上部传 动护罩,20后侧中部传动护罩,21后侧下部传动护罩,22后侧机械提升机构左轮,23后侧上 部右传动滑杆,24后侧上部传动丝杆,25落地运输方向轮,26后侧下部右传动滑杆,27后侧 下部升降电机,28后侧机械提升机构右轮,29后侧机械提升机构距离探测传感器,30后侧下 4 CN 111547538 A 说 明 书 3/3 页 部左传动滑杆,31落地运输拉杆,32九轴姿态模块,33电池供电模块,34前侧提升按钮,35前 侧下降按钮,36后侧提升按钮,37后侧下降按钮,38整体提升按钮,39整体下降按钮,40急停 按钮,41模式切换开关,42主控板MCU。











