
技术摘要:
本发明涉及一种基于数字孪生的工程装备故障智能诊断与自愈控制系统,属于工程装备自动控制技术领域。该系统包括物理实体模块、数据采集模块、信息处理模块、故障诊断模块、自愈控制模块以及数字孪生模块;数据采集模块实时采集物理实体模块中工程装备运行的信息数据, 全部
背景技术:
工程机械装备由众多系统构成,其结构十分复杂,在工程建设过程中通常是野外 露天作业,长期受到风吹日晒雨淋等外界因素的影响,工作条件十分恶劣;而且由于施工环 境的特殊性使得工程机械装备在施工场地的流动性较大且分布不集中,经常出现各种故障 不能及时得到排除,给施工进度和工程质量带来了影响。据统计,工程机械装备故障中有 70%是由液压系统故障引起,由于液压系统中各元件和工作介质都是在封闭油路内,其故 障不直观,具有隐蔽性、复杂性、随机性、模糊性及分散性等特点。常常是一种故障现象的出 现,存在多方面的原因,通常情况下不能立即找出故障部位;与此同时,随着工程装备机电 液一体化和智能化水平的提升,其故障检测诊断难度日趋复杂,传统的故障诊断方式已不 能适应现代故障诊断需求;因此开展工程装备故障智能诊断及控制处置,提高工程装备运 行的稳定性和可靠性是亟需解决的难题。 目前,工程装备的液压系统故障诊断主要有基于传递函数的故障诊断方法(如状 态估计方法、参数估计方法、时域分析法、小波分析法等)和基于人工智能的故障诊断方法 (如神经网络诊断法、模糊故障树诊断法等)。前者由于需要提取系统特征参数或建立系统 控制过程数学模型而导致诊断困难;后者由于专家系统知识难于获取及知识库维护不方便 等问题,限制了推广应用。尽管国内外对液压系统故障诊断及控制技术进行了广泛的研究, 但实际诊断过程中仍面临许多问题。任何一种单一的故障诊断及控制技术难以胜任工程机 械复杂液压系统的现场故障诊断及控制处理。
技术实现要素:
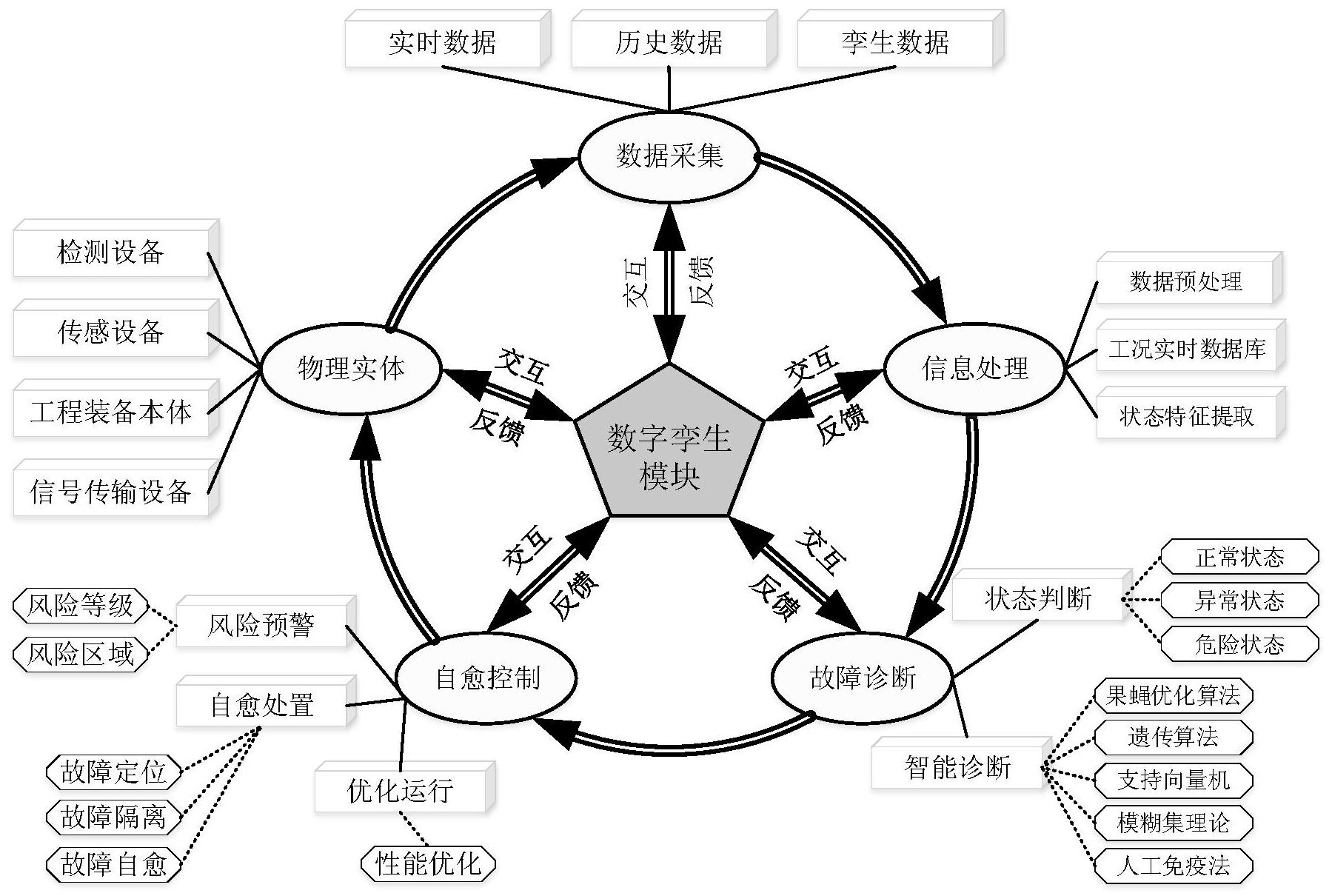
有鉴于此,本发明的目的在于提供一种基于数字孪生的工程装备故障智能诊断与 自愈控制系统及方法,利用数字孪生技术以数字化虚拟模型模拟物理实体在现实环境中的 操作行为,实现少样本数据条件下故障快速诊断及故障定位、隔离与处理,推动工程装备故 障自愈化;可提高故障预判准确性,减少故障发生率,降低装备维护成本,增强装备运行的 稳定性和健壮性。 为达到上述目的,本发明提供如下技术方案: 1、一种基于数字孪生的工程装备故障智能诊断与自愈控制系统,包括物理实体模 块、数据采集模块、信息处理模块、故障诊断模块、自愈控制模块以及数字孪生模块; 数据采集模块实时采集物理实体模块中工程装备运行的信息数据,并将数据传送 到数字孪生模块中进行工程装备的数字孪生模拟仿真;同时,数据经过信息处理模块处理 后在故障诊断模块中进行智能诊断分析,自愈控制模块对产生的故障进行自愈控制处理; 5 CN 111596604 A 说 明 书 2/8 页 数字孪生模块处于核心地位,与其他各模块进行数据交互反馈,实现信息交换和闭环优化。 进一步,物理实体模块包括工程装备本体单元、传感设备单元、检测设备单元和信 号传输设备单元;工程装备本体单元是指被用于故障诊断分析的工程装备,包括工程装备 机械结构本体、驱动工程装备运动和动作的电气及液力装置,以及对应的机电液控制系统; 传感设备单元包括用于感知工程装备运行过程中的位移、速度、温升、压力、流量和功耗等 信息的传感器件;检测设备单元是指用于检测工程装备的运行状态、系统运动路径、系统工 作效率等状态的器件;信号传输设备单元是指用于数据传输和交换的设备接口和网络;物 理实体模块的相关信息通过数据采集模块获得,并通过动态链接与数字孪生模块实现交互 反馈。 进一步,数据采集模块,用于采集工程装备运行过程中的多物理参数,至少包括受 力、速度、振动、转速、油温、油压、流量、工作时间、环境温度和位置等参数,同时将采集的数 据进行归类和存储,为后续的信息分析处理提供数据支持;采集的数据包括实时数据、历史 数据及孪生数据,来源于采用传感器获得的硬件采集和利用接口协议进行软件二次开发获 得的软件采集,所采集的数据包括工程装备既有的静态数据,以及依靠传感设备获得的工 程装备运行过程中的动态数据。 进一步,信息处理模块包括数据预处理单元、工况实时数据库单元以及状态特征 提取单元;数据预处理单元用于数据清洗融合和数据归一化处理,通过数据清洗融合,去除 数据采集过程中带来的数据噪声和干扰,获得有用信号;然后通过数据归一化处理对数据 标准化和离散化,形成智能诊断和自愈控制的数据系统;工况实时数据库单元用于存储工 程装备在不同工况条件下运行的正常状态数据和故障状态数据,便于后续的数据对比和数 据挖掘;状态特征提取单元用于对不同环境扰动及工作约束条件下工程装备运行的动态特 征进行分析处理,提取出特征参数,作为故障智能诊断和自愈控制的样本数据。 进一步,故障诊断模块包括状态判断单元和智能诊断单元;状态判断单元用于判 别工程装备的运行情况是正常工作状态还是可修复的故障异常状态或者需要紧急停机维 护的危险状态,为故障诊断提供基础;智能诊断单元是综合利用智能分析处理算法对当前 故障表现形式与故障形成原因进行深入分析; 更进一步,智能分析处理算法主要由果蝇优化、遗传算法、改进支持向量机、模糊 理论、人工免疫法和小波分析等智能算法联合构建,充分发挥各方法模式的优势,从而迅速 判断故障的形成原因及影响。 进一步,自愈控制模块包括风险预警单元、自愈处置单元和优化运行单元; 风险预警单元,根据故障诊断模块中的状态信息判断结果确定故障的风险危害等 级,分别用黄色、橙色、红色进行等级显示标识;同时对不同风险危害等级对应的风险分布 范围区域、可能的危害程度进行预警提示; 自愈处置单元包括故障定位、故障隔离和故障自愈三个过程,根据故障诊断分析 数据,迅速确定故障位置是位于机构本体层面还是控制管理层面,是机械部分还是液压部 分或者电气部分;然后对相应的故障点进行必要的机械隔离及电气液压隔离处置;再通过 故障自愈控制策略提供的自愈处置方案进行修复和完善; 优化运行单元,根据故障自愈修复结果的参数及状态,通过数字孪生交互反馈进 行工程装备故障的自我学习和故障处理操作,从而提高装备运行的稳健性。 6 CN 111596604 A 说 明 书 3/8 页 进一步,数字孪生模块包括数字孪生模型单元和动态特性模拟仿真单元;数字孪 生模型单元用于构建工程装备的实体模型及在施工运行过程中的动态虚拟模型,根据实时 数据,历史数据和孪生数据创建数字孪生模型,并对不同领域、类型及不同尺度规模的仿真 模型进行模型融合处理,建立更全面和更复杂的数字孪生模型,并提高模型的精度;动态特 性模拟仿真单元,根据工程装备的运行工况及外部环境扰动条件进行系统单因素及多因素 作用下的动态特性模拟仿真,获得其动态特性参数和实现工程装备实时运行动作的可视 化;数字孪生模块处于核心地位,通过数据交互反馈为故障诊断和自愈控制提供样本,为系 统运行优化提供指导。 2、一种基于数字孪生的工程装备故障智能诊断与自愈控制方法,具体包括以下步 骤: S1:系统开启:对系统中各模块软硬件初始化; S2:系统监测运行:对工程装备运行状态、外部环境扰动和工作参数等进行实时监 测; S3:多源异构信息数据采集:对工程装备运行过程中的多源异构信息进行采集,存 储及传输处理; S4:数字孪生模拟仿真:通过采集的实时数据、历史数据、孪生数据建立工程装备 的数字孪生模型,并进行动态模拟显示,获取仿真数据,实现工程装备的高保真仿真和虚实 同步映射; S5:数据预处理及判别:对实时数据、历史数据及仿真数据进行清洗、融合、归一化 等预处理,然后提取动态特征数据,据此判断采集的数据是否异常以及工程装备的运行状 态是否异常,为后续的诊断分析提供条件; S6:故障智能诊断:根据预处理后的数据信息对故障状态作进一步的分析,排除需 要停机维护的危险故障情形,然后采用智能分析处理算法进行诊断分析,为自愈处置提供 基础; S7:故障自愈控制处理:根据故障诊断结果对故障风险等级区域进行预警,同时采 用自愈控制策略结合当前的故障状态形成自愈处置方案集,并依据施工现场的约束条件对 自愈处置方案进行择优选择,然后完成自愈控制处理,实现工程装备故障自愈化,降低故障 对生产运行的影响; S8:系统自我学习及优化:通过数据交互反馈使得数字孪生模型依据自愈控制参 数进行模型修正和完善,开展故障自我学习和提高故障应变处理能力,从而增强工程装备 运行的稳健性,并回到系统正常监测状态,进行定期检测分析。 进一步,步骤S6中,故障智能诊断具体包括:采用M-works软件建立工程装备数字 孪生模型并融合AMESim液压系统仿真模型进行系统动态特性分析。在仿真模型中注入不同 的故障模式,确定数据测点并对典型的故障进行仿真模拟,获得液压系统在多因素扰动条 件下的动态特征向量,然后对故障特征向量采用动态主元分析方法(DPCA)进行降维处理; S61:对观测数据集进行扩展,得到动态数据矩阵; 7 CN 111596604 A 说 明 书 4/8 页 其中,时滞长度s的递推关系如下: S62:根据s递推关系计算s值:初始设置s=0开始递推关系计算,当rnew(s)≤0时, 计算出时滞长度s; S63:根据计算出的时滞长度s,对动态数据矩阵Xa(s)进行归一化处理,然后按照 PCA 的特征提取步骤确定主元个数,获得特征向量参数的提取;最后采用遗传算法改进支 持向量机对主元信息向量进行训练和预测,从而实现故障快速判断。 进一步,步骤S7中,故障自愈控制处理过程中,自愈控制的目标函数为: minZy=min(ω1G1 ω2G2 ω3G3 ω4G4) 其中,ωi为权重系数,Gi为控制元件或执行元件的压力损失、流量损失、动作响应 时间、动作频次。 本发明的有益效果在于: 1)通过建立工程装备机电液耦合的全系统数字孪生模型并进行故障模拟仿真和 虚实交互反馈,可以快速预测装备运行中的各种故障隐患并实现故障可视化,减少了采用 常规方法进行故障检测维护的盲目性和主观性; 2)故障智能诊断方法实现监测数据快速分析、比较和处理,及时发现故障点,提高 诊断速度和缩短故障时间,有效降低故障引起的危害; 3)自愈控制措施克服了依赖人工干预的故障修复缺陷,实现故障快速处理,从而 提高了工程装备自身预防和自动恢复能力,以及工程装备运行的可靠性和稳定性; 4)数字孪生模型根据故障修复结果的相关参数和状态进行自我学习和自我修复, 并反馈到工程装备的物理实体上,提高了工程装备抵御外界扰动及健康运行的能力,以确 保操作运行的快速响应。 本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并 且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可 以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和 获得。 附图说明 为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优 选的详细描述,其中: 图1为本发明故障智能诊断与自愈控制系统构成示意图; 图2为本发明故障智能诊断与自愈控制方法流程示意图; 图3为本发明实施例的工程装备液压系统组成原理图; 8 CN 111596604 A 说 明 书 5/8 页 图4为本发明实施例的工程装备液压缸故障自愈控制效果对照示意图。











