
技术摘要:
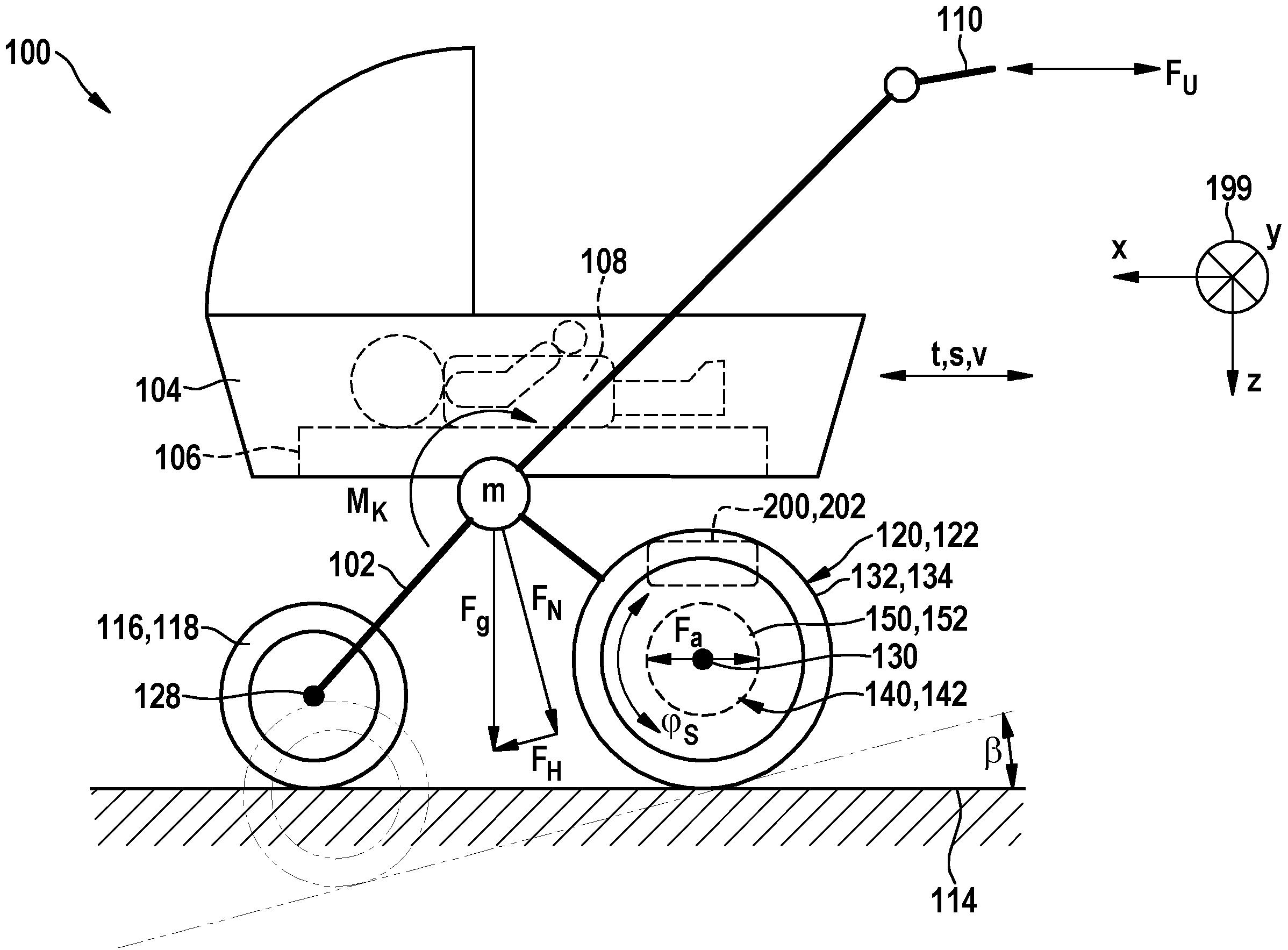
在一种运输装置(100)、尤其是具有至少三个轮(116、118、120、122)并且具有用于用户的手柄(110)的童车中,所述至少三个轮(116、118、120、122)中的至少一个轮(120、122)构造为驱动轮(132、134),所述驱动轮能借助于至少一个电驱动单元(140、142)以电动方 全部
背景技术:
从现有技术公知构造为童车的运输装置,该运输装置具有通过能以电动方式驱动 的驱动轮在推动或拉动运行时对用户的主动辅助,在该运输装置的情况下设置用户愿望识 别,该用户愿望识别允许控制电子装置识别用户是否想要从静止状态出发或从停止状态出 发电辅助地推动或拉动童车。在这种童车的情况下,例如力和/或加速度传感器集成到通常 高度可调的并且弓形的手柄中,这些力和/或加速度传感器允许所分配的控制电子装置检 测相应当前的用户愿望。
技术实现要素:
本发明涉及一种运输装置、尤其是一种具有至少三个轮并且具有用于用户的手柄 的童车,其中所述至少三个轮中的至少一个轮构造为驱动轮,所述驱动轮能借助于至少一 个电驱动单元以电动方式来驱动,以便能够至少部分地电动地辅助用户对该运输装置的手 动的推动或拉动运行,其中该至少一个电驱动单元能借助于至少一个被分配给该电驱动单 元的位置调节装置来调节。至少一个位置调节装置被构造为:借助于该至少一个电驱动单 元使该运输装置在地面上保持在停止状态下,并且在用户力超过预先给定的激活力阈时在 辅助状态下激活至少两个驱动轮的至少一个电驱动单元。 因此,在没有其它传感装置的情况下,仅仅通过分析在停止状态下由于用户力的 作用所造成的驱动轮的当前旋转角度的变化,就能实现特别简单且抗干扰的用户愿望识 别、也就是说用户是否想要从该运输装置的停止状态出发电辅助地推动或拉动该运输装 置。在这种情况下,该运输装置的优选地一个电驱动单元抵消该运输装置的稳定的停止状 态的任何变化(通过优选地一个位置调节装置动态地被调节),直至用户力超过激活力阈。 该用户愿望识别例如可以通过对电机电流的测量来实现,该电机电流分别与当前由电驱动 单元输出的转矩成比例,该电驱动单元必须恰好施加该转矩来维持稳定的停止状态直至用 户力达到或超过激活力阈。可以补充地检测驱动单元的旋转角度。那么,在辅助状态下,该 至少一个位置调节装置不活跃。 优选地,该至少一个位置调节装置被构造为:在用户力停止时、在用户力的方向反 转时或者在用户力低于激活力阈时将该运输装置从辅助状态复位到停止状态。经此,尤其 阻止了在用户松开手柄时该运输装置的不受控制的继续行驶、例如在倾斜地面上的不受控 制的继续行驶。 4 CN 111587204 A 说 明 书 2/6 页 按照一个优选的设计方案,该运输装置的前轮轴和/或后轮轴具有至少一个驱动 轮。因此,以简单的方式和方法就可以实现该至少一个驱动轮的布置。 在另一技术上有利的设计方案中,激活力阈能调整。经此,该激活力阈例如可以根 据该运输装置应在其上运动的相应的地面的类型或性质或地形来被适配。该地面尤其可以 按照柏油路面、铺石路面、无缝地面、沙地、碎石路面、绿地、冰面和/或雪地的类型来提供。 该地面的性质还可以是平的、倾斜的或波浪形的。还可以根据空的或被占用的童车的(空 车)质量或重量或者其它外部影响、诸如强风来设置适配。 优选地,该至少一个位置调节装置按照具有至少一个内部级、叠加级和外部级的 嵌套级联调节装置的方式来实现。经此,可以显著改善调节精度。 按照一个技术上有利的扩展方案,内部级被构造用于电驱动单元的电流调节。经 此,电动驱动装置或电机的与在绕组中的通过电流成比例的机械转矩能精确地被调节。 在另一设计方案中,叠加级被构造用于电驱动单元的转速调节。因此,存在利用独 立调节器进行的精确的转速调节。 根据一个扩展方案,外部级被构造用于电驱动单元的位置调节。经此,至少能调节 驱动轮的绝对旋转角度。 在另一有利的设计方案中,内部级具有至少一个滤波器。经此,可以使在位置调节 装置之内的不符合期望的振荡或干扰有效地衰减。 优选地,该至少一个滤波器是低通滤波器、高通滤波器或带通滤波器。经此,可以 滤出或抑制任意的干扰频率成分并且尤其是提高调节的稳定性。 在该运输装置的一个技术上有利的扩展方案中,叠加级和外部级分别具有至少一 个比例-积分调节器。因此,确保了该位置调节装置的稳定的调节特性。必要时,PI调节器可 以分别被补充微分调节器,以便例如建立PID调节器。还可以补充运行时环节和延迟环节。 按照一个实施方式,所述至少三个轮中的至少两个轮构造为驱动轮,所述驱动轮 能借助于至少一个电驱动单元以电动方式来驱动。因此,可以实现对该运输装置的对称驱 动,其中可以避免在该运输装置的推动或拉动运行时的所谓的“斜拉”。 优选地,每个驱动轮都分别分配有电驱动单元,并且这些电驱动单元能彼此无关 地分别借助于所分配的位置调节装置来被调节。因此,能单独地影响至少两个驱动单元。 优选地,至少两个位置调节装置构造得相同。经此,对于每个驱动轮来说,整体上 能实现该运输装置的基本上相同的调节特性以及因此对称的行驶特性。 按照另一设计方案,所述至少两个电驱动单元具有电动驱动装置。经此,存在对该 运输装置的转矩更强的、能精确调节的电驱动,该电驱动还允许运动部件最少的紧凑构造。 通过可选的变速器、特别是行星齿轮变速器,尤其可以实现这些电驱动单元的转矩提高。还 可以设置制动和/或离合装置。特别优选地,作为电动驱动装置使用永磁同步电机、所谓的 无刷直流电机。 附图说明 在随后的描述中,本发明依据在附图中示出的实施例详细地予以阐述。其中: 图1示出了构造为童车的运输装置的示意性侧视图; 图2示出了用于图1的童车的驱动轮的位置调节装置的简化框图;以及 5 CN 111587204 A 说 明 书 3/6 页 图3示出了图2的童车的后轮轴的示意图,该童车具有两个分别由位置调节装置单独调 节的驱动轮。











