
技术摘要:
本发明提供一种无人驾驶扫地机用避障系统及其避障方法,避障系统包括:控制单元,包括主控电路板、分析处理器以及数据存储模块;转向模块,输入端与分析处理器通信连接,输出端与转向控制器通信连接;制动模块,输入端与分析处理器通信连接,输出端与制动控制器通信连 全部
背景技术:
保洁员是指使用保洁养护专用工具,从事街道、广场、大型室内集会场所等地的废 弃物清除、垃圾清理,河岸设施养护,以及城市环境保护工作的人员。 我国现有此类保洁人员总数大约在3000万左右,对于此类保洁人员,平均年龄普 遍高于55岁,由于门槛低、文化水平低且缺乏培训,导致纪律性不高,职业意识差,而且保洁 工作需要深夜和凌晨进行,需要熬夜工作,导致效率低下,遭遇恶劣天气环境,保洁效率会 更加低下,此外人工保洁还存在工资开销,即使使用清洁车进行保洁工作,仍然需要保洁人 员来驾驶,又是一笔不小的开销。 因而,无人驾驶清洁车逐渐进入视野,无人驾驶汽车是智能汽车的一种,也称为轮 式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的目的。 随着机器人在工厂、仓库、酒店、商场、餐厅等环境中的使用,人们对机器人的移动 能力越为重视,以至于避障成为一个极为关键且必要的功能。人们希望机器人能根据采集 的障碍物的状态信息,在行走过程中通过传感器感知到妨碍其通行的静态或动态物体,然 后按照一定的方法进行有效避障,最终到达目标点。实现避障与导航的必要条件是环境感 知,在未知或者是部分未知的环境下避障需要通过传感器获取周围环境信息,包括障碍物 的尺寸、形状和位置等信息,因此传感器技术在移动机器人避障中起着十分重要的作用。 对于无人驾驶清洁车的避障,目前国内主要存在如下专利文献: 如专利公开号:CN209220144U,公开了一种避障装置,包括安装座、设于安装座内用于 探测周围障碍物的激光雷达,以及底座,底座上设有导向柱,安装座内且位于激光雷达底部 设有调节装置用于带动安装座沿导向柱上下以移动以躲避障碍物。当遇到外界的障碍物 时,调节装置带动安装座沿着导向柱上下移动以避开障碍物,减少了激光雷达发生剐蹭或 卡死现象。然而,该专利所提供的避障装置,避障方式单一,主要是对行进方向前方的障碍 物进行感应,无法预防侧方和后方的障碍物。
技术实现要素:
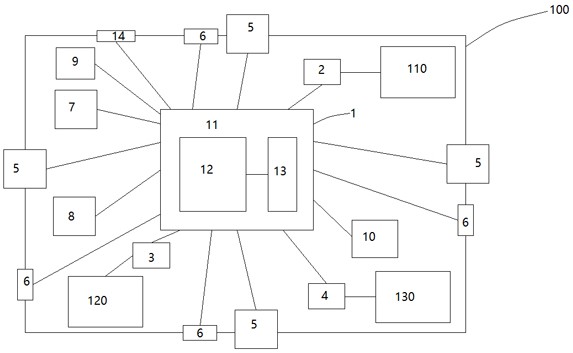
为解决上述存在的问题,本发明的目的在于提供一种无人驾驶扫地机用避障系统 及其避障方法,所述避障系统可对无人驾驶扫地机行进方向前端、两侧和后方的障碍物进 行检测,并可对碰撞进行感应,还可预防跌落情况发生,感应灵敏,处理速度快,效率高。 为达到上述目的,本发明的技术方案是: 一种无人驾驶扫地机用避障系统,所述避障系统包括:控制单元,设置于无人驾驶扫地 机内,所述控制单元包括主控电路板、设置于主控电路板上的分析处理器以及通过主控电 路板与分析处理器通信连接的数据存储模块,所述无人扫地机表面设置有与所述数据存储 5 CN 111580515 A 说 明 书 2/6 页 模块通信连接的数据存储接口,形成存储数据的传输,所述分析处理器内设距离阈值;转向 模块,设置于无人驾驶扫地机内,所述转向模块的输入端通过主控电路板与分析处理器通 信连接,所述转向模块的输出端与无人驾驶扫地机的转向控制器通信连接,形成对无人驾 驶扫地机转向的控制;制动模块,设置于无人驾驶扫地机内,所述制动模块的输入端通过主 控电路板与分析处理器通信连接,所述制动模块的输出端与无人驾驶扫地机的制动控制器 通信连接,形成对无人驾驶扫地机制动的控制;电机控制模块,设置于无人驾驶扫地机内, 所述电机控制模块的输入端通过主控电路板与分析处理器通信连接,所述电机控制模块的 输出端与无人驾驶扫地机的驱动电机通信连接,形成对驱动电机启动或停止的控制;障碍 物感应单元,所述障碍物感应单元通过主控电路板与分析处理器通信连接,形成对无人驾 驶扫地机周围障碍物的感应获得感应信号并将感应信号传输至分析处理器,分析处理器分 析处理感应信号生成感应数据;测距单元,所述测距单元通过主控电路板与分析处理器通 信连接,所述测距单元与障碍物感应单元通过分析处理器形成联动,障碍物感应单元感应 到障碍物,测距单元测量感应到的障碍物与无人驾驶扫地机之间间距得到距离数值并传输 至分析处理器,分析处理器分析比对距离数值和距离阈值;图像采集单元,所述图像采集单 元通过主控电路板与分析处理器通信连接,所述图像采集单元形成对障碍物图像的采集形 成图像信号并传输至分析处理器,分析处理器分析处理图像信号生成图像数据。 进一步地,所述障碍物感应单元为超声波传感器,所述无人驾驶扫地机行进方向 的前部、后部和两侧分别设置有一超声波传感器;所述测距单元为测距传感器,每个超声波 传感器对应一个测距传感器。 进一步地,所述无人驾驶扫地机行进方向前端下部设置有一通过主控电路板与分 析处理器通信连接的防跌落传感器。 进一步地,所述无人驾驶扫地机行进方向前端中部设置有一通过主控电路板与分 析处理器通信连接的碰撞传感器。 进一步地,所述图像采集单元为深度相机,架设于所述无人驾驶扫地机行进方向 前端上部;所述深度相机为基于TOF的深度相机。 进一步地,所述无人驾驶扫地机顶部设置有一通过主控电路板与分析处理器通信 连接的警报模块,所述警报模块为语音喇叭,所述语音喇叭内置语音存储模块。 进一步地,所述距离阈值包括转向距离阈值和制动距离阈值,所述制动距离阈值 小于转向距离阈值。 同时,本发明还提供一种无人驾驶扫地机用避障系统的避障方法,所述避障方法 包括如下步骤: S1)无人驾驶扫地机在执行清扫任务的行进过程中,障碍物感应单元感应无人驾驶扫 地机周围是否存在障碍物,如障碍物感应单元感应无人驾驶扫地机周围存在障碍物,则: S1.1)感应到无人驾驶扫地机行进方向前端存在障碍物,图像采集单元采集障碍物的 图像并传输至分析处理器,分析处理器分析处理图像信号生成图像数据,并进入步骤S2); S1.2)如感应到无人驾驶扫地机行进方向两侧和/或后方存在障碍物,则进入步骤S3); S2)对应无人驾驶扫地机行进方向前端的障碍物感应单元感应到无人驾驶扫地机周围 存在障碍物,对应无人驾驶扫地机行进方向前端的测距单元测量障碍物与无人驾驶扫地机 之间间距得到距离数值并传输至分析处理器:分析处理器分析比对距离数值和距离阈值, 6 CN 111580515 A 说 明 书 3/6 页 如果距离数值在转向距离阈值范围内,则进入步骤S2.1);如果距离数值在制动距离阈值范 围内,则进入步骤S2.2); S2.1)分析处理器通过主控电路板向转向模块发送转向指令,转向模块控制无人驾驶 扫地机的转向控制器进行转向;转向模块控制无人驾驶扫地机的转向控制器进行转向,警 告模块发出相应转向警告语音; S2.2)分析处理器通过主控电路板向制动模块和电机控制模块分别发送停止指令,制 动模块控制无人驾驶扫地机的制动控制器进行制动,电机控制模块控制驱动电机停止运 转,停止无人驾驶扫地机的行进;制动模块控制无人驾驶扫地机的制动控制器进行制动,警 告模块发出相应制动警告语音; S3)对应设置于无人驾驶扫地机行进方向两侧或后方的障碍物感应单元感应到无人驾 驶扫地机行进方向两侧和/或后方存在障碍物,测距单元连续多次测量障碍物与无人驾驶 扫地机之间间距,并将得到的多个距离数值传输至分析处理器,如多个距离数值逐渐减小, 则表明障碍物在移动中并在向无人驾驶扫地机靠近,进入步骤S2.2); S4)如未感应到障碍物存在,则无人驾驶扫地机继续前进。 进一步地,所述避障方法还包括:S5)碰撞传感器感应到无人驾驶扫地机与障碍物 发生碰撞,则发送碰撞信号至分析处理器,进入步骤S2.2),如未感应到碰撞,则无人驾驶扫 地机继续前进。 进一步地,所述避障方法还包括:S6)防跌落传感器对实时探测无人驾驶扫地机行 进方向斜下方的距离并将测距值传输至分析处理器,分析处理器内设距离稳定阈值,测距 值在距离稳定阈值内,表明行进路面平坦;测距值超出距离稳定阈值,表明行进路面异常, 表明无人驾驶扫地机行进方向前端存在台阶或凹陷,进入步骤S2.1);如测距值未超出距离 稳定阈值,则无人驾驶扫地机继续前进。 本发明的有益效果在于: 所述避障系统通过在无人驾驶扫地机行进方向前端设置障碍物感应单元,形成对无人 驾驶扫地机行进方向前方障碍物的感应,通过在无人驾驶扫地机行进方向两侧和后方设置 障碍物感应单元,形成对无人驾驶扫地机行进方向两侧和后方障碍物的感应; 结合测距单元对无人驾驶扫地机与障碍物之间间距的测定,以及分析处理器内距离阈 值的设定,且距离阈值包括转向距离阈值和制动距离阈值,测定距离在转向距离阈值内则 转向,测定距离在制动距离阈值内则停止行进; 从而对多种情况进行预判和预警,保证无人驾驶扫地机的顺利行进和顺利清扫; 碰撞传感器的设计,可在分析处理器处理不及导致碰撞时,及时停止无人驾驶扫地机, 从而形成转向-提前停止-碰撞停止的三重判定机制; 防跌落传感器的设计,可防止无人驾驶扫地机跌落,在遇到台阶或凹坑之前便可进行 转向、躲避,感应灵敏,处理速度快,效率高。 附图说明 图1为本发明实施例所提供的一种无人驾驶扫地机用避障系统的控制关系结构示 意图; 图2为本发明实施例所提供的一种无人驾驶扫地机用避障系统的避障方法流程示意 7 CN 111580515 A 说 明 书 4/6 页 图。











