
技术摘要:
本发明公开了一种深海近底长臂摆动式多金属结核采矿系统及方法,采矿系统包括水面支持船舶、水下近底采矿平台、海底采集系统,水面支持船舶通过主扬矿管道与水下近底采矿平台连接,水下近底采矿平台通过长臂与海底采集系统连接;海底采集系统包括铰吸头;采矿方法为水 全部
背景技术:
深海底蕴藏着丰富的多金属结核和稀土等矿产资源,随着陆地资源逐渐枯竭和海 洋技术的发展,越来越多的国家将资源的开发转向了深海,特别是近年来发达国家加快了 深海多金属结核资源商业开发技术的研发进度,甚至制定了商业开发的目标。 目前深海多金属结核资源开采系统的核心问题是如何高效地将赋存在海底稀软 沉积物上的矿石采集并提升到海面采矿船上。目前已有的深海多金属结核采矿基本方案是 海面采矿支持母船布放一台履带式或雪橇自行式采矿车到海底,在采矿车和海面支持母船 之间通过泵和管道组成的扬矿系统连接,采集的矿物通过扬矿系统输送到海面的母船上。 该方案存在以下几点问题,一是稀软沉积物抗剪强度低,履带自行式采矿车牵引力受限,动 力不足而不利于行走,尤其是海底壕沟和坡度较大的地形(目前将坡度大于15度的区域列 为不可采)限制了自行式采矿车作业,丢掉了部分矿区,使回采率降低;二是多金属结核属 于面矿类型,每平米仅有10-20公斤,现有的自行式采矿车由于动力问题单次采矿宽度有 限,采矿能力和规模很难大幅提升,因而采矿效率较低;三是现有的采集头采用横排布局形 式,对于采矿宽度内微地形的变化适应能力不足,降低了回采率和采矿效率。
技术实现要素:
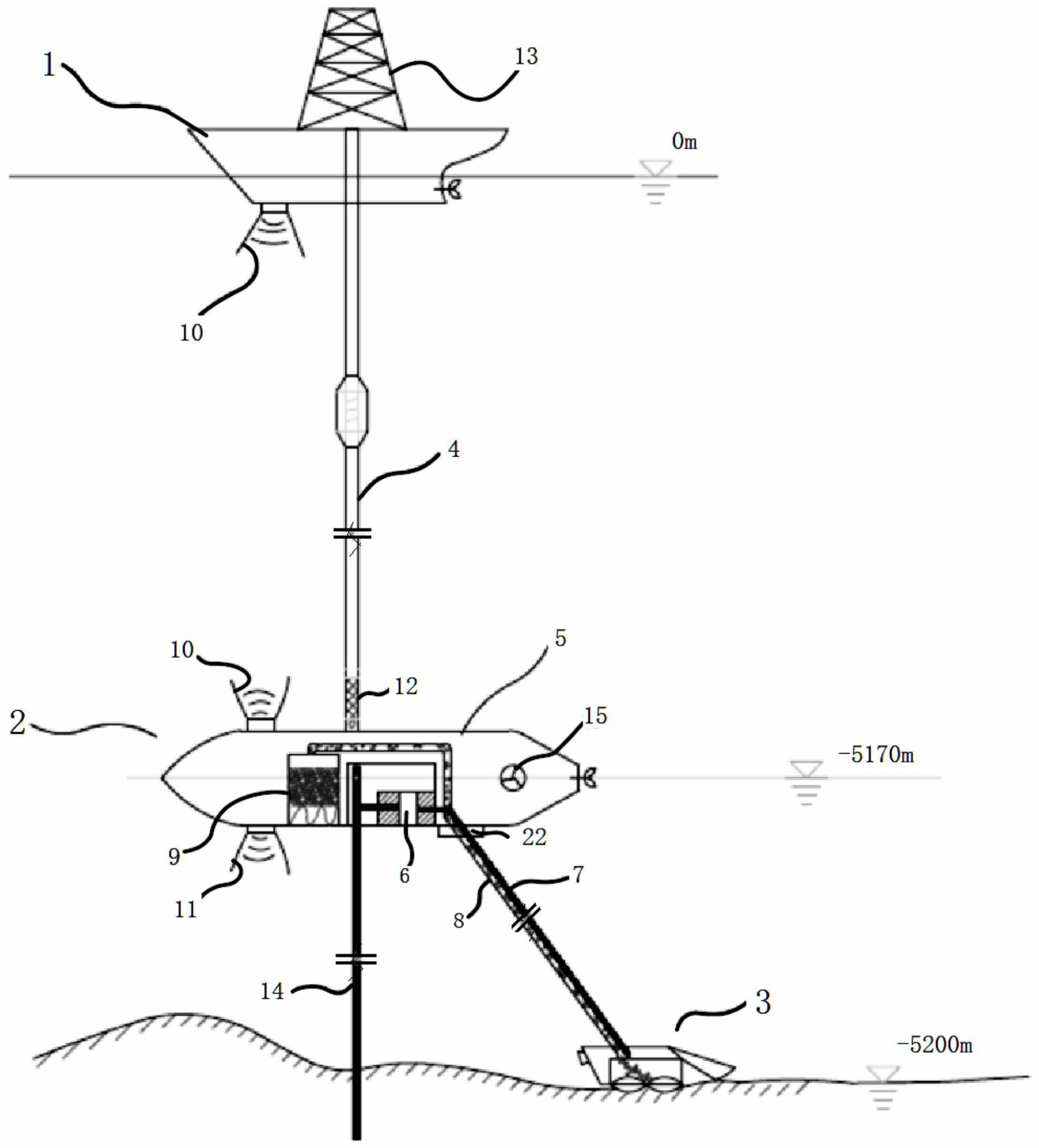
为了解决上述技术所存在的不足之处,本发明提供了一种深海近底长臂摆动式多 金属结核采矿系统及方法。 为了解决以上技术问题,本发明采用的技术方案是:一种深海近底长臂摆动式多 金属结核采矿系统,包括水面支持船舶,它还包括水下近底采矿平台、海底采集系统,水面 支持船舶通过主扬矿管道与水下近底采矿平台相连接,水下近底采矿平台通过长臂与海底 采集系统相连接,水下近底采矿平台来回摆动通过长臂带动海底采集系统在沉积物表面来 回作业;海底采集系统包括海底采集系统本体,海底采集系统本体上设置有铰吸头;水下近 底采矿平台通过长臂将高压水送到海底采集系统上驱动铰吸头旋转搅动海底沉积物使矿 石从沉积物中剥离、悬浮,并通过长臂将矿石抽吸提升到水下近底采矿平台内,矿石再经过 主扬矿管道提升至水面支持船舶上。 进一步地、水下近底采矿平台包括水下近底采矿平台本体、高压水系统、泵吸系 统、储料给料系统、长臂; 水下近底采矿平台本体的上部连接有软管,软管用于连接主扬矿管道;水下近底 采矿平台本体的下部与长臂相连接,长臂用来连接海底采集系统并拖动海底采集系统做摆 动清扫作业采集矿石;高压水系统、泵吸系统均设置于水下近底采矿平台本体上;长臂包括 高压水管线、矿石输送管道,高压水系统通过高压水管线与海底采集系统相连接,为海底采 4 CN 111577289 A 说 明 书 2/5 页 集系统供给高压水;泵吸系统通过矿石输送管道与海底采集系统相连接,从海底采集系统 处抽吸矿石; 储料给料系统设置于水下近底采矿平台本体上,储料给料系统包括储料仓、给料 机,给料机设置于储料仓的下方并与储料仓相连通;储料仓与泵吸系统相连通,接收泵吸系 统抽吸来的矿石;给料机与主扬矿管道相连通,将储料仓内的矿石输送到主扬矿管道内。 进一步地、水下近底采矿平台还包括平台推进动力系统,平台推进动力系统设置 于水下近底采矿平台本体上,用于驱动水下近底采矿平台本体前进及摆动; 平台推进动力系统包括定位桩、侧推螺旋桨,定位桩设置于水下近底采矿平台本 体的下部,定位桩用于实现水下近底采矿平台在水下的步进运动;水下近底采矿平台本体 尾部的左舷、右舷各设置有一个侧推螺旋桨,侧推螺旋桨用于实现水下近底采矿平台的左 右摆动。 进一步地、海底采集系统还包括液压马达、高压水引射器,液压马达的马达入口与 高压水管线相连通,液压马达的马达出口与高压水引射器相连接;高压水引射器设置于矿 石输送管道的下部,矿石输送管道下端处的管道入口的位置与铰吸头的位置相对应;铰吸 头设置于海底采集系统本体的底部,铰吸头的一端与液压马达的输出轴固定相连; 海底采集系统本体的尾部设置有限位板,限位板能限制铰吸头的位置防止其沉入 沉积物中,并能使海底采集系统更好地适应海底微地形的变化,摆动清扫时使铰吸头能贴 底作业。 进一步地、水面支持船舶的月池上设置有塔吊,主扬矿管道吊装于塔吊的下端,水 下近底采矿平台吊装于主扬矿管道的下端。 进一步地、水下近底采矿平台还包括通讯定位系统、监测系统,通讯定位系统、监 测系统均设置于水下近底采矿平台本体上;通讯定位系统为水下平台通讯和超短基线定位 系统,用于精确确定水面支持船舶、水下近底采矿平台以及海底采集系统的相对位置及其 姿态;监测系统为海底微地形和矿石赋存情况监测系统,用于获取海底微地形和矿石赋存 情况。 一种深海近底长臂摆动式多金属结核采矿系统的采矿方法为: 高压水系统通过高压水管线向海底采集系统提供高压水驱动液压马达,液压马达 带动铰吸头旋转铰吸,铰吸头搅动海底表层沉积物使矿石与沉积物分离;高压水流经液压 马达后再通过高压水引射器射入矿石输送管道中,在矿石输送管道中产生输送矿石所需的 流速,且通过泵吸系统将矿石从铰吸头处抽吸到矿石输送管道内,矿石被输送至水下近底 采矿平台的储料仓内并被给料机输送至主扬矿管道内,进而被输送至水面支持船舶上; 在平台推进动力系统的驱动下,水下近底采矿平台通过长臂带动海底采集系统前 进及做清扫式摆动,完成海底采集系统对海底矿石的采集。 本发明的采矿系统针对多金属结核矿石赋存于稀软沉积物上、面广、丰度低的特 点,通过水下近底采矿平台下放长臂带动海底采集系统摆动采集矿石,解决了现有技术中 采矿车在沉积物上行走动力不足的问题,同时也更容易适应海底壕沟和坡度较大的地形条 件,适应性更强;通过长臂带动海底采集系统摆动的作业方式,海底采集系统单次摆动的采 集宽度可达数十米,采矿宽度更大,极大提高采矿效率和采矿能力;海底采集系统设置有限 位板使得铰吸头能更好地适应微地形起伏,贴底采集矿石,避免由于微地形起伏使得铰吸 5 CN 111577289 A 说 明 书 3/5 页 头局部离底高度过高或插入沉积物而漏采,提高了回采率。 附图说明 图1为本发明的采矿系统的结构示意图。 图2为水下近底采矿平台的结构示意图。 图3为海底采集系统的结构示意图。 图4为液压马达与铰吸头、高压水引射器的连接关系示意图。 图中:1、水面支持船舶;2、水下近底采矿平台;3、海底采集系统;4、主扬矿管道;5、 水下近底采矿平台本体;6、平台推进动力系统;7、高压水系统;8、泵吸系统;9、储料给料系 统;10、通讯定位系统;11、监测系统;12、软管;13、塔吊;14、定位桩;15、侧推螺旋桨;16、海 底采集系统本体;17、铰吸头;18、高压水管线;19、矿石输送管道;20、采集系统监控设备; 21、高压水引射器;22、接口;23、液压马达;24、限位板。











