
技术摘要:
本发明属于康复医疗设备技术领域,具体涉及一种六自由度上肢康复训练臂及机器人,训练臂包括肩关节组件、肘关节组件、前臂旋转机构以及腕关节组件;肩关节组件包括:X向肩关节驱动机构、第一直角转接架、Z向肩关节驱动机构、第二直角转接架以及Y向肩关节驱动机构;X向 全部
背景技术:
传统的上肢康复训练是由康复治疗师与患者通过一对一的直接的长期肢体接触, 由治疗师使用不同的手法对患者的肩关节、肘关节、腕关节、指掌关节进行被动性训练,并 附加语言交流、药物治疗等,患者进行大量反复的重复性运动,不断刺激受损脑部神经,修 复脑神经。这种一对一训练过程单调、耗时长、成本高,并且康复治疗师体力消耗大、效率 低,相对于传统的康复训练,采用上肢康复机器人配合或者替代康复治疗师实现康复训练 更为有效。 上肢康复机器人可以分为两大类,一类为末端牵引式康复机器人系统,另一类为 外骨骼式康复机器人系统。末端牵引式康复机器人系统通过机器人运动带动患者上肢运动 来达到康复训练目的的机械系统。机器人系统与患者相对独立,仅通过患者手部与机器人 末端相连。其结构简单、易于控制,价格低廉。使用末端牵引式康复机器人对于整个手臂是 合适的,但是不能很好地对于肩、肘、腕等关节进行针对性训练,训练功能无法达到要求。外 骨骼因为与人体上肢运动相似,可以更好的辅助患者进行康复训练,但其结构设计及控制 方法具有一定的难度。外骨骼式上肢康复训练机器人必须要人的大臂、小臂和手部完全与 外骨骼匹配,一般需要将上肢与机械手臂固定在一起,会增加患者的不适感,控制出现故障 或者机械臂的长度调节不当甚至会对患者造成二次伤害。
技术实现要素:
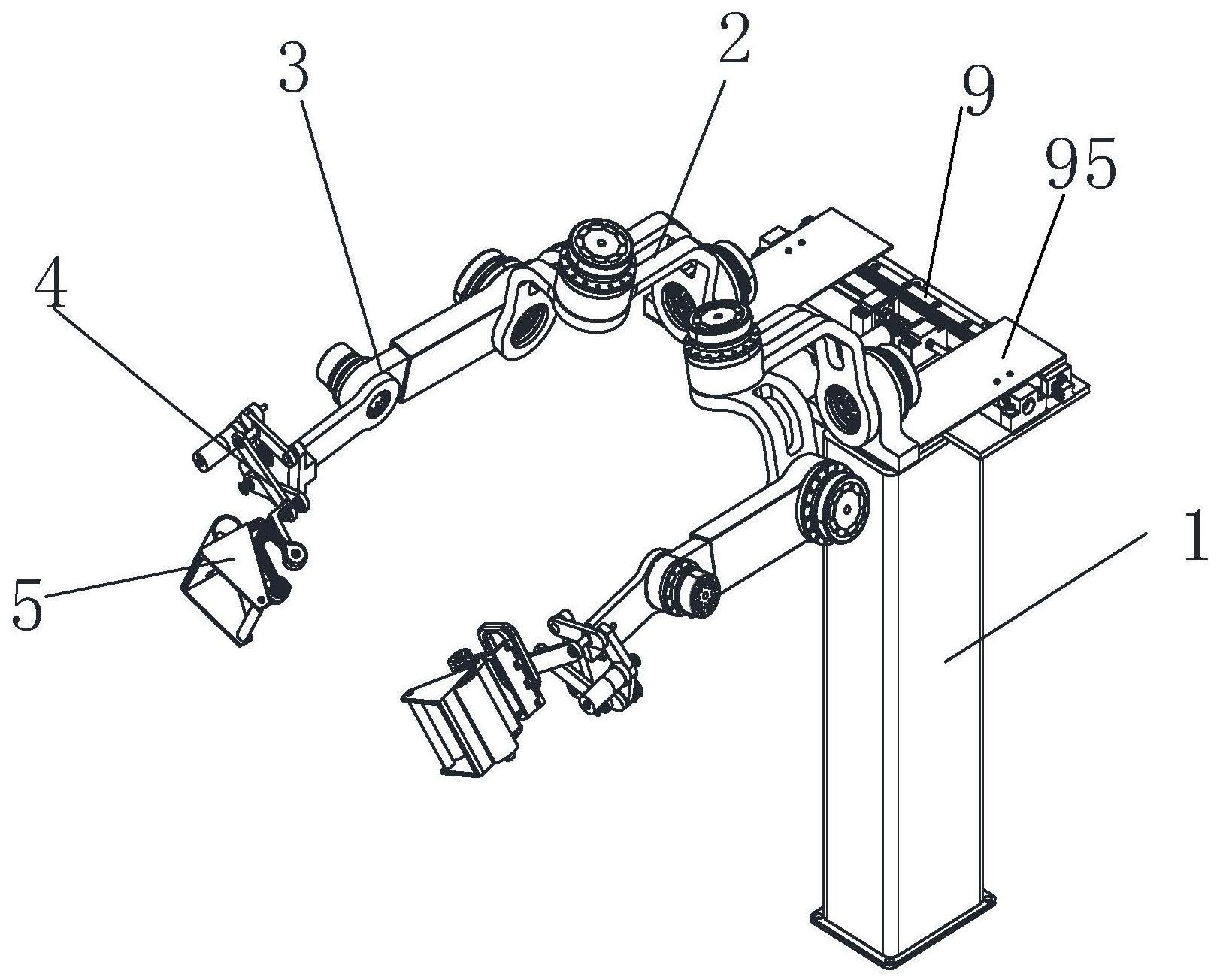
本发明的目的是克服现有技术中存在的外骨骼式上肢康复训练器和末端牵引式 康复机器人存在的缺陷,提供一种不但能够对肩关节、肘关节和腕关节做针对性训练,又能 够柔性带动患者康复训练的六自由度上肢康复训练臂及机器人。 本发明解决其技术问题所采用的技术方案是: 一种六自由度上肢康复训练臂,其特征在于:包括肩关节组件、通过大臂支架与所 述肩关节组件连接的肘关节组件、通过小臂支架与所述肘关节组件连接的前臂旋转机构以 及与所述前臂旋转机构连接的腕关节组件;所述肩关节组件包括:X向肩关节驱动机构、一 端与所述X向肩关节驱动机构的输出轴连接的第一直角转接架、安装在所述第一直角转接 架的另一端上的Z向肩关节驱动机构、一端与所述Z向肩关节驱动机构的输出轴连接的第二 直角转接架以及安装在所述第二直角转接架的另一端的Y向肩关节驱动机构;所述Y向肩关 节驱动机构的输出轴连接大臂支架;所述X向肩关节驱动机构、Z向肩关节驱动机构和Y向肩 关节驱动机构的转轴互相垂直且相交于一点,所述Z向肩关节驱动机构位于所述X向肩关节 驱动机构和Y向肩关节驱动机构的上方。 进一步地,所述前臂旋转机构包括:与所述小臂支架固定连接的前臂旋转底架、对 4 CN 111588590 A 说 明 书 2/5 页 称转动连接在所述前臂旋转底架上的第一摆臂和第二摆臂、安装在所述第一摆臂上端和第 二摆臂上端的前臂电机支架、安装在所述前臂电机支架上的旋转电机、与所述旋转电机输 出轴同轴连接的第一主动带轮、通过第一皮带与所述第一主动带轮连接的第一从动带轮; 第一从动带轮的第二转动轴通过轴承安装在前臂电机支架上,第一摆臂上固定安装有第三 转动轴,第三转动轴上通过轴承转动安装有第一把手支架,第一把手支架上安装有与第三 转动轴同轴固定的第二主动带轮;第二主动带轮通过第二皮带连接有第二从动带轮,第二 从动带轮转动安装在的第四转动轴上,所述第四转动轴固定安装在所述第一把手支架上, 第二把手支架通过轴承与所述第四转动轴转动连接;第四转动轴上还固定安装有腕关节连 接件;第二把手支架通过支架固定轴转动安装在所述第二摆臂上。 进一步地,所述腕关节组件包括与所述腕关节连接件固定连接的腕关节固定架、 一端通过轴承转动安装在腕关节固定架上的腕关节旋转架腿、与所述腕关节旋转架腿的另 一端固定连接的腕关节架体、安装在所述腕关节架体上的腕关节电机、与所述腕关节电机 输出轴同轴连接的第三主动带轮、通过腕关节皮带与所述第三主动带轮连接的第三从动带 轮以及设置在腕关节架体上的把手;所述第三从动带轮通过腕关节转轴与所述腕关节固定 架固定连接,所述腕关节转轴上还固定连接有用来张紧腕关节皮带的张紧架,所述腕关节 转轴与所述腕关节旋转架腿转动连接。 进一步地,所述张紧架包括张紧限位槽和张紧轮,所述腕关节旋转架腿上安装有 伸入到所述张紧限位槽内的限位柱,所述张紧轮抵靠在所述腕关节皮带上。 进一步地,所述腕关节旋转架腿为两个,分别对称设置在所述腕关节固定架的两 端。 进一步地,所述大臂支架包括与与所述Y向肩关节驱动机构的输出轴同轴连接的 大臂上支架和用来安装所述肘关节电机的大臂下支架,所述大臂上支架和大臂下支架伸缩 滑动连接。 一种六自由度上肢康复训练机器人,其特征在于:包括两对称设置的六自由度上 肢康复训练臂;所述上肢康复训练机器人还包括升降机构以及设置在所述升降机构顶端的 两臂间距调节机构。 进一步地,两臂间距调节机构包括固定在所述升降机构输出端的支撑板、安装在 所述支撑板中部的间距调节电机、安装在所述间距调节电机输出轴上的主动锥齿轮、对称 设置在所述主动锥齿轮两侧且与所述主动锥齿轮啮合的两个从动锥齿轮、与所述从动锥齿 轮同轴固定连接的丝杠螺母副以及固定连接在所述丝杠螺母副的螺母上的训练臂安装板; 所述肩关节组件的X向肩关节驱动机构安装在所述训练臂安装板上。 更进一步地,所述两臂间距调节机构还包括与所述丝杠螺母副的丝杠平行设置的 滑轨,所述滑轨上滑动连接有滑块,所述滑块与所述丝杠螺母副的螺母通过训练臂安装板 固定连接。 本发明的一种六自由度上肢康复训练臂及机器人的有益效果是: 1、通过三个肩关节驱动机构模拟肩关节的运动,并且Z向肩关节驱动机构位于肩 部的上方,X向肩关节驱动机构和Y向肩关节驱动机构也位于肩关节的外部,同时肘关节电 机也位于肘关节的外部,人的上肢与上肢康复训练臂的各零部件不干涉、不接触,提高的患 者训练的舒适性。 5 CN 111588590 A 说 明 书 3/5 页 2、前臂旋转机构和腕关节组件采用连杆机构代替传动的直接电机驱动的方式,使 驱动轴线从前臂内转移到体外,使得装置结构变小,电机变小,减少病人训练的恐惧感,增 加病人训练的积极性,同时增加的训练过程中的柔性和灵活性,不会对患者造成二次伤害。 3、升降机构可以根据人的身高进行调节,适应不同身高的人进行康复训练,同时 两臂间距调节机构可以根据患者肩胛骨的距离进行调节,能够适应不同体型的患者。 附图说明 下面结合附图和











