
技术摘要:
提供一种能够高效地进行回转升动臂作业的回转式液压工程机械。液压工程机械具备上部回转体、包含动臂的作业装置、液压泵(31)、可变容量型回转马达(25)、接受回转指令操作并进行回转控制的回转控制装置(35,45)、动臂缸(26)、接受升动臂指令操作并进行升动臂控制的动臂 全部
背景技术:
回转式液压工程机械一般具备:下部行走体;搭载在该下部行走体上且能回转的 上部回转体;安装在上部回转体上的作业装置;使所述上部回转体进行回转的液压马达即 回转马达;排出要提供给该回转马达的工作油的液压泵;以及设置在该液压泵与所述回转 马达之间的回转控制阀。所述回转控制阀对应于操作人员对回转用操作杆的操作进行开闭 动作,使所述液压泵排出的工作油中提供给所述回转马达的工作油的流量发生变化。 所述液压泵排出的工作油不仅被用于所述回转马达的驱动,在很多情况下还被用 于其它的液压致动器、具体是指使所述作业装置所包含的动臂起伏的动臂缸的驱动(例如 加速)。这种情况下,该动臂缸经由不同于所述回转控制阀的动臂控制阀,与所述回转马达 并联地连接至所述液压泵。因此,所述液压泵同时用于向所述回转马达提供工作油和向所 述动臂缸提供工作油。 这种工程机械在回转操作和用于使所述动臂起伏的动臂操作同时进行时即复合 操作时,从所述液压泵提供给所述回转马达和所述动臂缸的工作油的流量的分配十分重 要。专利文献1中,为了控制该流量的分配,公开了利用可变容量型液压马达来构成所述回 转马达,并且基于针对应当到达的回转角度、动臂抬起高度和回转体的转动惯量(moment of inertia)而预先输入的值,来计算回转马达的吸收流量(即马达容量),改变所述回转马 达的容量以达到该计算出的吸收流量。 然而,所述专利文献1中记载的工程机械并不容易进行事先的输入操作以及基于 其输入进行准确的运算控制。具体而言,该工程机械必须在事先输入应当到达的回转角度、 动臂的抬起高度以使铲斗上升并回转到成为目标的回转位置和高度位置、以及回转体的转 动惯量的值,操作人员的负担较大。而且,必须基于该值来进行复杂的运算控制,成本也不 可避免地会大幅上升。此外,回转体的转动惯量也会随着作业装置的姿势、以及铲斗中堆放 的土块重量等而发生变化,因此,难以实现准确的输入以及基于该输入计算出恰当的马达 容量。因而,期望可以提供通过更加简便的运算控制来有效地提高作业效率的技术。 现有技术文献 专利文献 专利文献1:日本发明公开公报特开昭62-55337
技术实现要素:
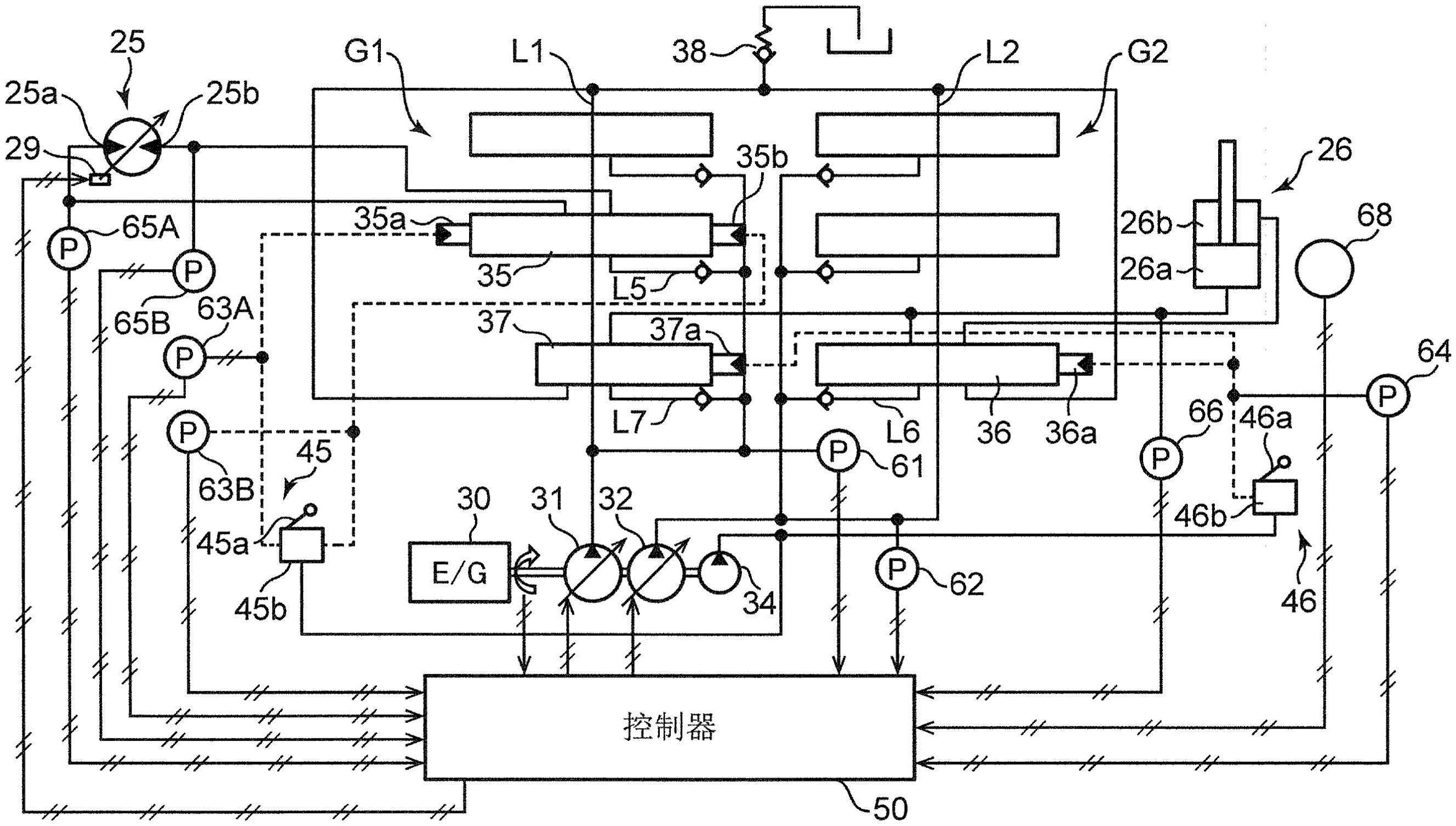
本发明的目的在于提供一种回转式液压工程机械,其通过简单的控制就能高效地 进行利用从共用的液压泵排出的工作油来同时进行上部回转体的回转动作和动臂的上升 动作的回转升动臂作业。 本发明的发明人为了实现上述目的,关注所述回转升动臂作业中动臂的立起角度 4 CN 111587306 A 说 明 书 2/13 页 与所要求的升动臂速度及回转速度之间的关系。具体而言,在所述动臂的立起角度较小从 而作业装置的姿势较低时,即能够推定动臂的立起角度离目标角度很远时,动臂需要跟随 上部回转体的回转而以足够的速度上升至恰当的高度,当所述动臂的立起角度达到一定程 度的角度从而作业装置的姿势较高时,即能够推定动臂的立起角度在一定程度上接近目标 角度时,抑制升动臂速度并相应地增大回转速度,从而能够提高作业效率。 本发明基于这样的观点而完成。本发明提供一种回转式液压工程机械,其包括:下 部行走体;上部回转体,可回转地搭载在所述下部行走体上;作业装置,搭载于所述上部回 转体,其包含可起伏地连结于所述上部回转体的动臂;液压泵,排出工作油;回转马达,由接 受所述液压泵排出的工作油的供给而进行动作的可变容量型液压马达构成,对应于该工作 油的供给使所述上部回转体进行回转;回转控制装置,接受用于使所述上部回转体进行回 转的回转指令操作,控制从所述液压泵向所述回转马达提供工作油的方向及流量;动臂缸, 接受从所述液压泵排出的工作油的供给而进行工作以使所述动臂起伏;动臂控制装置,接 受用于使所述动臂向立起方向动作的升动臂指令操作,并且控制从所述液压泵向所述动臂 缸提供工作油的流量;动臂角度检测器,检测所述动臂的立起角度即动臂角度;以及,容量 控制部,控制所述回转马达的容量即回转马达容量。所述容量控制部具有:基于所述动臂角 度检测器检测出的所述动臂角度来计算对所述回转马达容量的指令值即指令马达容量的 指令马达容量运算部;以及生成与该指令马达容量相对应的容量指令信号并将其输入至所 述回转马达,从而使所述回转马达容量变为与所述指令马达容量相对应的容量的指令信号 输入部。所述指令马达容量运算部,在所述回转控制装置被施加了所述回转指令操作的同 时所述动臂控制装置被施加了所述升动臂指令操作的回转升动臂操作时,在所述动臂角度 为预先设定的回转优先角度以下的情况下,将所述指令马达容量设定为预先设定的基本容 量或比该基本容量小的容量,在所述回转升动臂操作时所述动臂角度大于所述回转优先角 度的情况下,将所述指令马达容量设定为大于所述基本容量的容量。 附图说明 图1是表示本发明的实施方式所涉及的液压式工程机械即液压挖掘机的图。 图2是表示所述液压挖掘机上搭载的液压回路的图。 图3是表示与所述液压回路相连接的控制器的功能结构的框图。 图4是表示所述控制器中的指令马达容量运算部中存储的用于计算与动臂角度相 对应的第1增减比例的图表的内容的曲线图。 图5是表示所述控制器中的指令马达容量运算部中存储的用于计算与动臂缸底压 力相对应的第2增减比例的图表的内容的曲线图。 图6表示所述控制器进行的运算控制动作的流程图。











