
技术摘要:
本发明公开了一种RFID时空数据交通流特征参数预测方法,包括以下步骤:S1:获取RFID采集目标路段的交通数据,对交通数据进行时空相关性分析;S2:获取影响目标路段交通状态的交通流特征参数和能够反映目标路段交通状态的交通流特征参数的相关性;S3:预测目标路段在交 全部
背景技术:
准确、全面、可靠地掌握交通流特征参数预测信息是实现交通控制、交通诱导和提 供实时交通信息的前提、基础和关键。目前,国内外对于交通参数的预测大多是通过相机传 感器、环形线圈、出租车GPS、浮动车等获取的大量数据进行分析研究。然而,一方面,有些传 感器在恶劣环境中不能很好的识别车辆信息;另一方面,有些传感器采集的数据大多都是 抽样数据。本发明提供了一种新兴RFID电子车牌采集技术,这种技术不受天气影响,并且获 取数据是全样本数据,而且具有高效、可靠的感知车辆信息的能力。 通过查阅相关论文和专利,现有的交通流特征参数预测方法大多是计算量大、实 时性和抗干扰能力差、预测精度不高、预测效率低等。
技术实现要素:
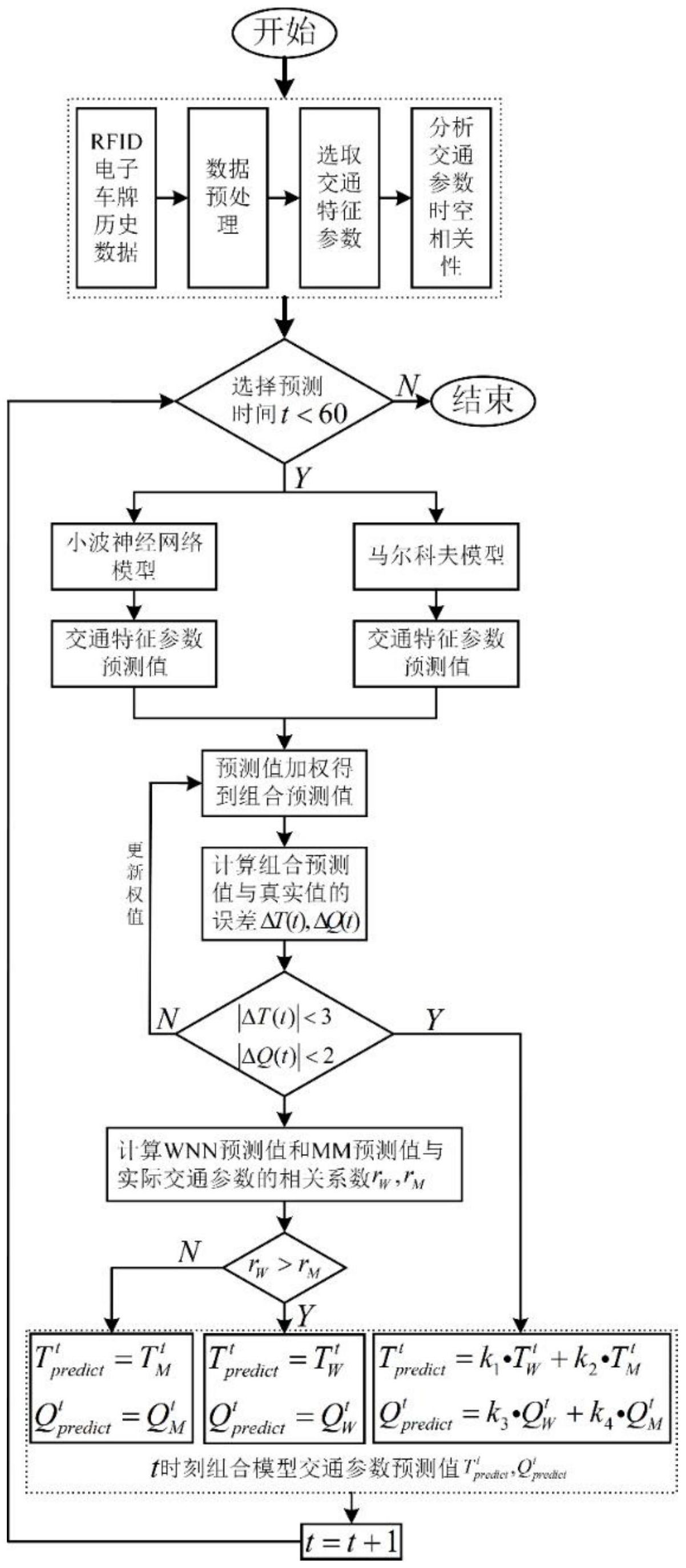
有鉴于此,本发明的目的是提供一种RFID时空数据交通流特征参数预测方法,。 本发明的目的是通过以下技术方案实现的: 一种RFID时空数据交通流特征参数预测方法,包括以下步骤: S1:获取RFID采集目标路段的交通数据,对交通数据进行时空相关性分析; S2:获取影响目标路段交通状态的交通流特征参数和能够反映目标路段交通状态 的交通流特征参数的相关性; S3:预测目标路段在交通流稳定状态和交通流不稳定状态下的交通流特征参数; S4:对两种状态下的交通流特征参数进行加权组合。 进一步,所述S1具体为: 获取通过目标路段每一个车辆的RFID基站号、车辆ID号和车辆经过采集点的时 间; 对获取的信息数据叠加形成时空数据矩阵; 分析每个采样时刻与该时刻的采集点数量的相关性。 进一步,所述影响目标路段交通状态的交通流特征参数包括上游标准车流量、慢 行车比例、大型车比例和路口转向流量占比; 所述能够反映目标路段交通状态的交通流特征参数包括平均行程时间和下游路 口标准车流量。 进一步,所述S2所述的相关性获取方法为: yi=b0 b1x1 b2x2 b3x3 b4x4 其 中 , 表 示 偏 回 归 系 数 , 4 CN 111583649 A 说 明 书 2/7 页 x1为所述上游标准车流量,x2为所述慢行车比例,x3为所述大型车比例,x4为所述 路口转向流量占比; y1为所述平均行程时间,y2为所述下游路口标准车流量。 进一步,所述交通流不稳定状态的交通流特征参数的预测方法为:建立紧致型小 波神经网络模型,使得输入层为所述上游标准车流量、所述慢行车比例、所述大型车比例和 所述路口转向流量占比,输出层为所述平均行程时间和所述下游路口标准车流量; 所述交通流稳定状态的交通流特征参数的预测方法为:建立马尔科夫模型,预测 下一时刻的目标路段的所述平均行程时间和所述下游路口标准车流量。 进一步,所述S4所述的加权组合的权值的设定条件为:预测的所述平均行程时间 与实际的所述平均行程时间绝对误差应小于2-4s,预测的所述标准车流量与实际的所述标 准车流量绝对误差应小于1-2.5pcu。 进一步,当不满足所述设定条件时,判定rW1与rM1、rW2与rM2的关系; 当rW1大于rM1,rW2大于rM2,选择所述小波神经网络模型模型的预测值作为预测结 果,否则,选择所述马尔科夫模型预测值作为预测结果。 本发明的有益效果是: 本发明克服了现有的预测方法计算量大、实时性和抗干扰能力差、预测精度不高、 预测效率低等问题具有可以实现准确、全面、可靠的交通流特征参数预测,为改善交通拥堵 问题提供了一种新思路的优点。 本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并 且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可 以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和 获得。 附图说明 为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进 一步的详细描述,其中: 图1为本发明总体流程示意图; 图2紧致型小波神经网络交通参数预测模型。











