
技术摘要:
本申请公开一种管道检测机器人和管道检测系统。管道检测机器人,包括机器人本体、喷嘴以及软管。喷嘴设于机器人本体。软管连通喷嘴,且被配置为向喷嘴输送高压介质。机器人本体被配置为在喷嘴喷出高压介质的作用下产生升力。
背景技术:
目前管道检测机器人可以实现管道的内窥检测工作,可以检测管道的破裂、腐蚀 的焊缝质量等情况,采用摄像机拍摄等一系列图像处理技术,将采集到的图像进行进一步 的处理,识别管道病害情况,辅助人工进行管道损伤判断。 现有技术中,管道检测机器人一般为轮式管道检测机器人,如果管道中有高的障 碍物,机器人无法越过障碍物继续检测,影响检测效率。
技术实现要素:
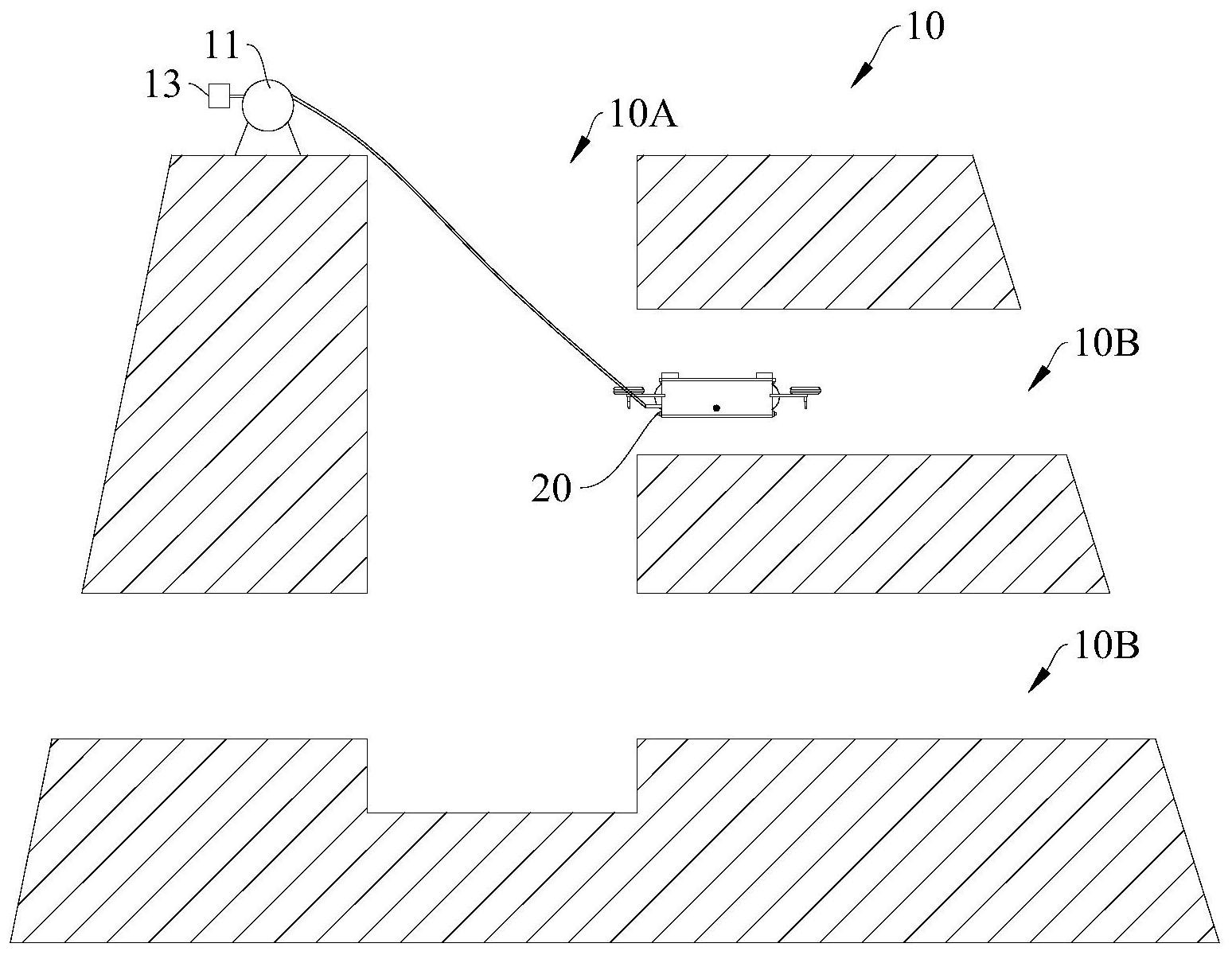
本申请提供了一种管道检测机器人和管道检测系统,其能够解决现有技术中,管 道检测机器人无法越过障碍物的问题。 第一方面,本发明实施例提供一种管道检测机器人,包括机器人本体、喷嘴以及软 管; 喷嘴设于机器人本体; 软管连通喷嘴,且被配置为向喷嘴输送高压介质; 其中,机器人本体被配置为在喷嘴喷出高压介质的作用下产生升力。 上述方案,提供了一种管道检测机器人,其包括机器人本体、喷嘴以及软管。在管 道检测机器人工作过程中,遇到高的障碍物时,软管的一端会连接高压介质源,以通过软管 向喷嘴输送高压介质,使得高压介质能够作用于管道内壁,使得机器人本体产生升力而作 上升运动,配合机器人本体的前进动作(现有技术中,机器人本体的行走轮通过伸缩机构设 于机器人本体,故,当机器人本体腾空时,行走轮也会在伸缩机构的作用下始终作用于管道 的壁面,使得机器人本体能够前进),从而能够顺利地越过高的障碍物,保证管道检测机器 人的正常工作。 在可选的实施方式中,软管为水管,水管被配置为向喷嘴输送高压水。 在可选的实施方式中,软管为气管,气管被配置为向喷嘴输送高压气。 在可选的实施方式中,喷嘴的开口竖直向下,以喷射出竖直向下的高压介质。 在可选的实施方式中,喷嘴的数量为四,四个喷嘴间隔均匀地设于机器人本体。 在可选的实施方式中,机器人本体包括平行于水平面设置的行走轮; 行走轮的轮毂的轮辐呈倾斜叶片状,被配置为在轮毂转动时产生升力。 在可选的实施方式中,管道检测机器人还包括清洗喷头,清洗喷头设于机器人本 体,且清洗喷头的开口朝向机器人本体的摄像头。 在可选的实施方式中,机器人本体设有防撞橡胶,防撞橡胶位于机器人本体的摄 像头处。 3 CN 111594697 A 说 明 书 2/4 页 在可选的实施方式中,管道检测机器人还包括控向喷头和电磁阀,控向喷头通过 所述电磁阀与软管连接; 控向喷头的开口朝向机器人本体的行进方向的反方向。 第二方面,本发明实施例提供一种管道检测系统,包括线缆卷盘、电缆、控制器以 及前述实施方式任意一项的管道检测机器人; 电缆的一端连接机器人本体,电缆的另一端连接线缆卷盘,控制器与线缆卷盘电 性连接以控制线缆卷盘作收线和放线动作。 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对实施例中所需要使用的附 图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看作是对 范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这 些附图获得其他相关的附图。 图1为本实施例中管道检测系统的结构示意图; 图2为本实施例中管道检测机器人的俯视图; 图3为本实施例中管道检测机器人的侧视图。 图标:10-管道检测系统;10A-管道井口;10B-支管;11-线缆卷盘;12-电缆;13-控 制器; 20-管道检测机器人;21-机器人本体;22-喷嘴;23-软管;24-控向喷头;25-摄像 头;26-清洗喷头;27-防撞橡胶;210-行走轮;211-伸缩机构;240-电磁阀;2100-轮辐。











