
技术摘要:
本发明公开了一种多尺度时空马尔可夫遥感影像亚像元定位方法及系统,首先对输入的低空间分辨率数据通过混合像元分解,求取地物丰度图,构建光谱能量函数,并进行初始化定位。在此基础上,构建亚像元级和像元级双尺度空间邻域关系,为亚像元定位提供空间先验信息,使得 全部
背景技术:
混合像元是定量遥感技术发展的主要障碍之一。传统的图像分类方法,以像元为 基本单位,将每个像元考虑为单一类型的地物。然而,受遥感影像的空间分辨率限制,单个 像元内部往往包含多类地物,混合像元问题将导致通过硬分类方法得到的地物分类图的空 间分辨率很低。 目前已有人提出将混合像元分解算法作为解决混合像元问题的有效方法,该算法 尽管能够对遥感影像进行处理而得到各个像元的地物丰度,但是它却无法给出准确的地物 分布位置。为了能够给出准确的地物分布位置,通常使用亚像元定位,其是利用地物空间分 布特征来确定不同地物在混合像元中的空间位置,从而获得更高分辨率地物分类图的过 程。 因此,亚像元定位能够有效地降低混合像元对遥感影像地物提取的影响从而获得 亚像元尺度的高时空分辨率地物分类结果,其是遥感地物信息提取及定量遥感发展的重要 方法。但是,在亚像元定位方法中如何利用地物的先验信息来确定地物的空间相关性是决 定定位结果的关键。目前,大多数亚像元定位都采用空间最大相关性,其假定亚像元点间的 距离越近,其相关性越大,以此来确定邻近亚像元的类别。然而,现有的时空超分辨率制图 方法在计算最大目标亚像元空间相关性时,多数方法只考虑亚像元尺度的空间依赖,而忽 视了中心亚像元所属混合像元尺度的空间依赖,导致了无法全面地利用原始影像中提供的 地物空间分布信息,无法有效地解决亚像元空间不确定性问题。这类方法所采用的空间先 验信息单一、有限,甚至还可能出现错误,尤其是在地物的边界位置。针对上述问题,本发明 提出了一种“光谱-双尺度空间-时间”时空马尔可夫遥感影像亚像元定位方法。
技术实现要素:
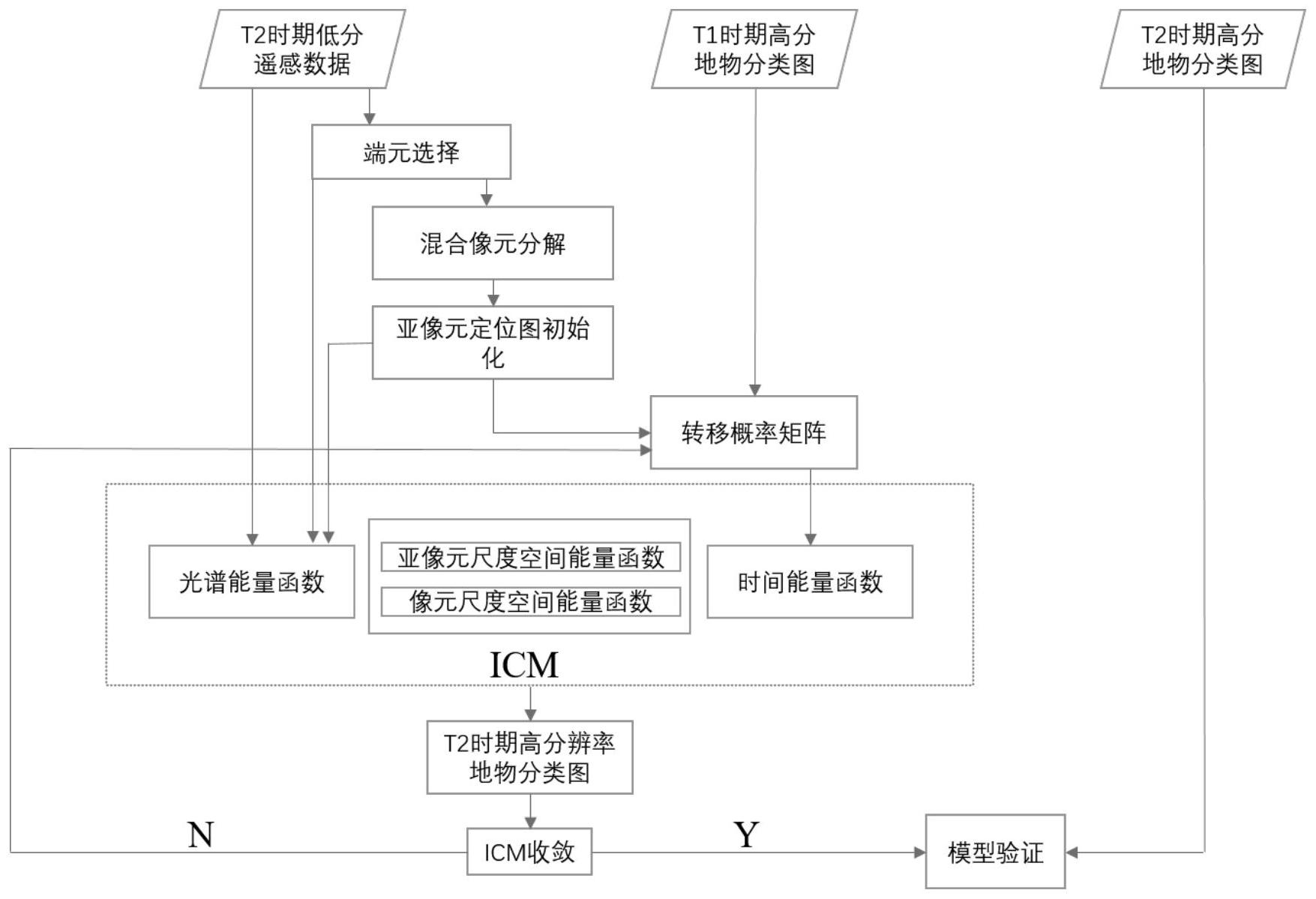
本发明要解决的技术问题在于,针对现有技术中先验信息不足的问题,提供一种 多尺度时空马尔可夫遥感影像亚像元定位方法及系统。 本发明提供的一种多尺度时空马尔可夫遥感影像亚像元定位方法,包括以下步 骤: S1、对T2时刻输入的遥感影像进行混合像元分解,求取地物丰度图;根据所述地物 丰度图来构建光谱能量函数Uspectral(X|Y),并根据所述地物丰度图对亚像元的位置进行初 始化定位;其中,Y表示输入的低空间分辨率遥感影像数据,X表示输出的高空间分辨率地物 类别图; S2、基于步骤S1初始化定位的基础上,以目标亚像元为中心,基于所述目标亚像元 构建像元级空间邻域和亚像元级空间邻域;基于所述像元级空间邻域和亚像元级空间邻 5 CN 111583330 A 说 明 书 2/8 页 域,构建包括像元、亚像元双尺度的空间能量函数; S3、建立不同时相即T1时刻到T2时刻、不同分辨率的遥感影像在时间和空间上的 联系,针对T2时刻输入的遥感影像中的每个像元,计算地物从T1时刻到T2时刻的时间转移 概率,所述地物的时间转移概率用于构建时间能量函数Utemporal: 其中,Xpre为T1时刻的高空间分辨率地物类别图片,X为T2时刻的高空间分辨率类 别图片,z为尺度因子,n表示步骤S1输入的遥感影像中包括的像元个数,C为地物类别数,P (c2(ai,k)|c1(ai,k)表示地物从T1时刻到T2时刻的时间转移概率; S4、结合步骤S1-S3构建的光谱能量函数、双尺度空间能量函数和时间能量函数, 构建以光谱-双尺度空间-时间为整体的一体化目标能量函数,其中,采用目标优化模型来 对所述一体化目标能量函数进行优化求解,从而获取研究区域亚像元定位结果;所述一体 化目标能量函数的数学表达式为: 式中, 表示亚像元尺度空间能量函数, 表示像元尺度空间能量 函;α、δ、β分别是空间能量函数、亚像元尺度空间能量函数和时间能量函数的权重系数。 本发明提供一种多尺度时空马尔可夫遥感影像亚像元定位系统,包括以下模块: 光谱能量函数构建模块,用于对T2时刻输入的遥感影像进行混合像元分解,求取 地物丰度图;根据所述地物丰度图来构建光谱能量函数Uspectral(X|Y),并根据所述地物丰度 图对亚像元的位置进行初始化定位;其中,Y表示输入的低空间分辨率遥感影像数据,X表示 输出的高空间分辨率地物类别图; 双尺度空间能量函数构建模块,用于基于初始化定位的基础上,以目标亚像元为 中心,基于所述目标亚像元构建像元级空间邻域和亚像元级空间邻域;基于所述像元级空 间邻域和亚像元级空间邻域,构建包括像元、亚像元双尺度的空间能量函数; 时间能量函数构建模块,建立不同时相即T1时刻到T2时刻、不同空间分辨率的遥 感影像在时间和空间上的联系,针对T2时刻输入的遥感影像中的每个像元,计算地物从T1 时刻到T2时刻的时间转移概率,所述地物的时间转移概率用于构建时间能量函数Utemporal: 其中,Xpre为T1时刻的高空间分辨率地物类别图片,X为T2时刻的高空间分辨率类 别图片,z为尺度因子,n表示步骤S1输入的遥感影像中包括的像元个数,C为地物类别数,P (c2(ai,k)|c1(ai,k)表示地物从T1时刻到T2时刻的时间转移概率; 亚像元定位模块,用于结合构建的光谱能量函数、双尺度空间能量函数和时间能 量函数,构建以光谱-双尺度空间-时间为整体的一体化目标能量函数,其中,采用目标优化 模型来对所述一体化目标能量函数进行优化求解,从而获取研究区域亚像元定位结果;所 述一体化目标能量函数的数学表达式为: 式中, 表示亚像元尺度空间能量函数, 表示混合像元尺度空间 6 CN 111583330 A 说 明 书 3/8 页 能量函;α、δ、β分别是空间能量函数、亚像元尺度空间能量函数和时间能量函数的权重系 数。 实施本发明的一种多尺度时空马尔可夫遥感影像亚像元定位方法及系统,具有以 下有益效果: 1、本发明构建亚像元级和像元级双尺度空间邻域关系,充分利用多尺度空间邻域 关系,既在像元尺度全面反映较大区域的地表信息,又在亚像元尺度获得更为精细的空间 信息,为亚像元定位提供精度更高、更为详细的空间先验信息; 2、本发明通过建立不同时相、不同空间分辨率的遥感影像在时间和空间上的联 系,充分考虑时间尺度对地物时空变化分析的影响,在高空间和高时间分辨率不可兼得的 现实条件下,较好地解决了高分辨率遥感数据时间序列不足的问题,进而得到既有高时间 分辨率,又有高空间分辨率的遥感影像; 3、本发明通过亚像元定位技术,实现多源遥感数据融合,推进遥感数据时空融合 技术发展。 附图说明 下面将结合附图及实施例对本发明作进一步说明,附图中: 图1是本发明提供的一种多尺度时空马尔可夫遥感影像亚像元定位方法流程图; 图2是本发明提供的一种多尺度时空马尔可夫遥感影像亚像元定位方法执行流程 图; 图3为原始低分影像、较早时刻地物类别图、结果验证用参考图及类别变化图; 图4为MSTMRF_SPM方法的不同参数时地物分类图; 图5为将本发明提供的方法与现有的亚像元定位方法进行遥感分类结果比较图; 图6是本发明提供的一种多尺度时空马尔可夫遥感影像亚像元定位系统结构图。











