
技术摘要:
本发明涉及一种停机装置,包括支撑架、用于带动停机平台翻转的转动部件,转动部件内具有第一步进电机或第一伺服电机,转动部件的两端分别连接支撑架的顶端和停机平台,且转动部件用于通过第一步进电机或第一伺服电机控制停机平台进行不少于180°的翻转,停机平台上设有 全部
背景技术:
无人机具有成本低、生存能力强、机动性能好等优点,且随着无人机技术的发展, 无人机在国内外的各行业各领域当中都将起到重要作用,目前,无人机往往降落在一个平 台上,当碰到雨雪天气,由于雨水和雪水会直接滴落在无人机上,对无人机造成损坏,若建 立一个用于存放无人机的机库,则成本较高。
技术实现要素:
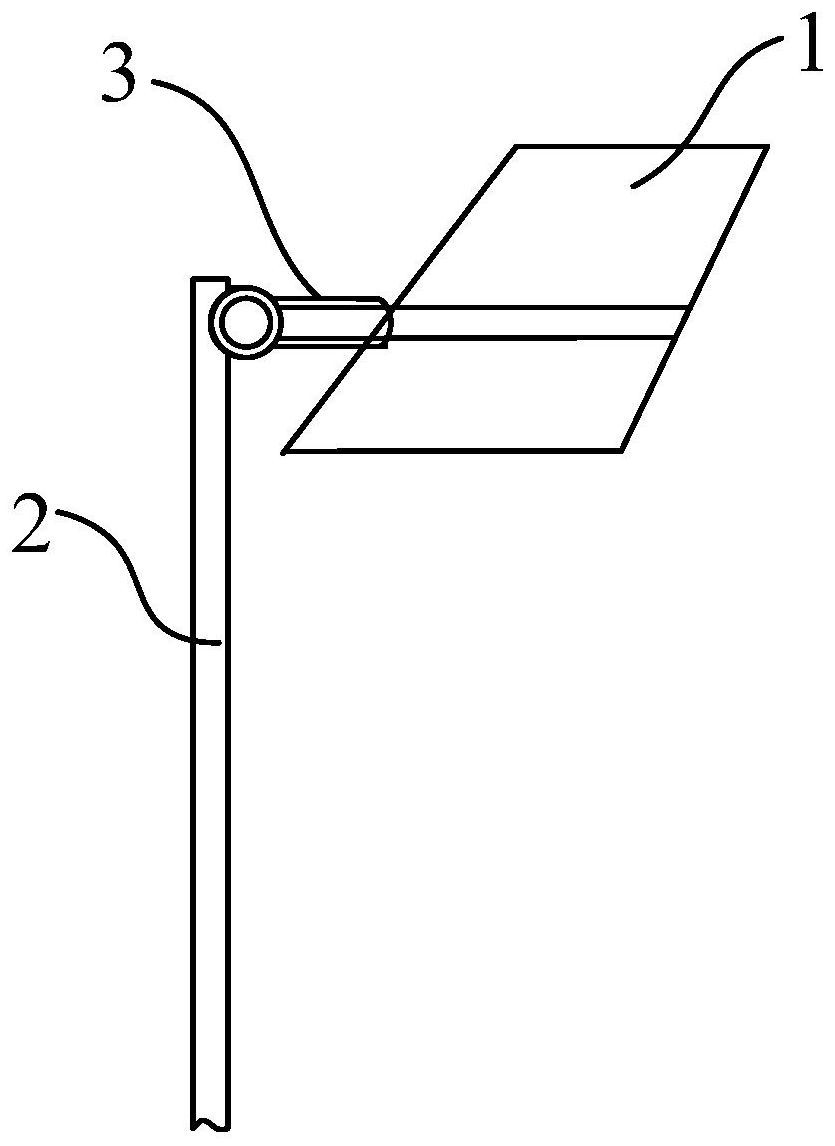
本发明所要解决的技术问题是针对现有技术的不足,提供了一种停机装置。 本发明的一种停机装置的技术方案如下: 包括支撑架、用于带动停机平台翻转的转动部件,所述转动部件内具有第一步进 电机或第一伺服电机,所述转动部件的两端分别连接所述支撑架的顶端和所述停机平台, 且所述转动部件用于通过所述第一步进电机或所述第一伺服电机控制所述停机平台进行 不少于180°的翻转,所述停机平台上设有用于固定无人机的固定部件。 本发明的一种停机装置的有益效果如下: 当停机平台处于水平状态时,将无人机降落在停机平台上,通过固定部件将无人 机进行固定,然后通过转动部件带动停机平台翻转180°后,无人机会倒悬在停机平台的下 方,此时,停机平台能为无人机遮挡雨雪,防止雨水和雪水会直接滴在无人机,避免对无人 机造成损坏,且本申请的停机装置结构简单、制造成本低,适合大范围使用。 在上述方案的基础上,本发明的一种停机装置还可以做如下改进。 进一步,所述转动部件与所述支撑架的顶端之间还连接有直杆,且所述直杆的两 端分别与所述支撑架的顶端和所述转动部件铰接,形成第二铰接点和第一铰接点,所述第 二铰接点还设有用于控制所述第二铰接点铰接转动的第二步进电机或第二伺服电机,所述 第一铰接点还设有用于控制所述第一铰接点铰接转动的第三步进电机或第三伺服电机,所 述支撑架的顶端还水平设置有遮挡板,且所述遮挡板位于所述直杆的正上方。 采用上述进一步方案的有益效果是:当无人机降落在停机平台上后,若转动部件 发生故障,此时转动部件不能带动停机平台进行翻转,可通过直杆将停机平台及无人机收 缩至遮挡板的下方,由遮挡板为无人机遮挡雨雪,进一步防止雨水和雪水直接滴在无人机。 进一步,所述固定部件为磁吸,或,所述固定部件包括齿条、第五电机和锁孔,所述 第五电机用于驱动所述齿条伸至所述锁孔内和/或从所述锁孔内收缩。 采用上述进一步方案的有益效果是:对固定部件进行了说明,当无人机降落在停 机平台上时,可通过磁吸对无人机进行固定,也可通过第五电机驱动齿条穿过无人机的 “凵”字形结构的支架再伸至锁孔内,以完成对无人机的固定,结构简单,成本低。 进一步,还包括激光对位部件和控制器,所述激光对位部件包括所射出的激光方 3 CN 111605720 A 说 明 书 2/9 页 向与所述齿条平行的多个激光器,所述激光器用于检测所述无人机的“凵”字形结构的支架 的支架宽度; 所述控制器用于根据检测到的支架宽度来确定是否使所述第五电机驱动所述齿 条伸至所述锁孔内。 采用上述进一步方案的有益效果是:控制器根据激光器所检测到的支架宽度来确 定是否使第五电机驱动齿条穿过无人机的“凵”字形结构的支架再伸所述锁孔内,以实现无 人机的固定,且提高了自动化程度。 进一步,所述控制器还用于当所述固定部件的位置朝上时,使所述第五电机驱动 所述齿条收缩从所述锁孔内脱出。 采用上述进一步方案的有益效果是:当固定部件的位置朝上时,表明无人机在停 机平台的正上方,此时,使所述第五电机驱动齿条收缩从锁孔内脱出,对无人机解除固定, 以便于无人机随时起飞。 进一步,所述停机平台的两面分别为停机面和非停机面,所述非停机面上设置有 第一太阳能板,还包括:与所述第一太阳能板连接的蓄电池。 采用上述进一步方案的有益效果是:在非停机面上设置第一太阳能板,通过第一 太阳能板向蓄电池进行充电,以便于通过蓄电池向无人机进行充电,提高便利性和实用性。 进一步,所述停机面上还设置有用于降落所述无人机的旋转圆盘,所述旋转圆盘 连接有用于驱动所述旋转圆盘进行旋转的第四步进电机或第四伺服电机,当所述控制器判 定所述检测到的支架宽度与所述无人机的“凵”字形结构的支架的实际支架宽度不一致时, 所述控制器发出旋转指令,所述第四步进电机或第四伺服电机根据所述旋转指令驱动所述 旋转圆盘进行旋转,直至所述检测到的支架宽度与无人机的“凵”字形结构的支架的实际支 架宽度一致时,然后使所述第五电机驱动所述齿条伸至所述锁孔内。 采用上述进一步方案的有益效果是:当无人机降落在停机面的旋转圆盘上时,当 控制器判定检测到的支架宽度与所述无人机的“凵”字形结构的支架的实际支架宽度不一 致时,可发出旋转指令,使第四步进电机或第四伺服电机根据旋转指令驱动旋转圆盘进行 旋转。进而调整无人机的位置,直至所述检测到的支架宽度与无人机的“凵”字形结构的支 架的实际支架宽度一致时,再对无人机进行固定。 进一步,所述遮挡板的顶面上还设第二太阳能板,所述第二太阳能板与所述蓄电 池连接。 采用上述进一步方案的有益效果是:在遮挡板的顶面设置第二太阳能板,通过第 二太阳能板也可向蓄电池进行充电,进一步提高便利性和实用性。 进一步,所述齿条的底部还依次设有缓冲层和防滑层。 采用上述进一步方案的有益效果是:一方面,通过缓冲层防止与无人机的“凵”字 形结构的支架发生硬摩擦,以避免对无人机造成损坏;另一方面,通过防滑层防止在停机平 台在翻转时无人机的“凵”字形结构的支架相对于齿条发生相对移动,以避免对无人机造成 损坏。 进一步,所述遮挡板的边缘部还设有遮挡折边。 采用上述进一步方案的有益效果是:通过在遮挡板的边缘部设置遮挡折边,一方 面,防止雨水和雪水从停机平台的边缘处流至无人机上,避免对无人机造成损伤;另一方 4 CN 111605720 A 说 明 书 3/9 页 面,也防止有风将雨水和雪水直接吹至无人机上,进一步避免对无人机造成损伤。 附图说明 图1为本发明实施例的一种停机装置的结构示意图之一; 图2为本发明实施例的一种停机装置的结构示意图之二; 图3为图2的一种停机装置中将停机平台收缩至遮挡板的下方的示意图; 图4为本发明实施例的一种固定部件的结构示意图。











