
技术摘要:
本发明公开了一种基于游戏机制的可编程示教机器人,包括主体,所述主体前端设有障碍物感知模块,障碍物感知模块上方设有视觉模块,视觉模块的两侧设有障碍物避让模块,主体四周设有发光模块,主体的后端设有攻击模块,主体两侧设有变身模块;本发明采用模块化设计,能 全部
背景技术:
目前,就中国青少年整个娱乐倾向来讲,大多数青少年选择沉浸在网络游戏或手 机游戏里来度过自己的童年。显而易见,这些游戏对于缺乏自我控制能力的青少年们来说 是弊大于利的。在孩子们成长的黄金时期,游戏无法给予孩子们知识、无法帮助他们养成良 好的习惯,并对他们儿时性格的塑造有着极大的不利影响。而游戏之所以可以吸引青少年 的注意力,是因为它内在的心理学机制“付出短时间就会收获”。青少年们在上学的过程中, 可能经过很长的努力学习但最后换来的期末考试成绩并不理想,自己的付出难以有对等的 回报。而游戏所采用的机制不一样,诸如许多网络游戏中采用的“打怪升级”模式,孩子们可 以通过打怪迅速升级,迅速变强,这种机制与上课学习的机制相比,显然前者的优势是远远 超出后者的。 就国家教育机器人市场来看,当下,市面上售卖的教育机器人大多功能单一,无法 同时兼容多种功能。无论是在机器人的移动上,还是整体的控制系统上,大都离不开单向轮 与遥控器的传统控制方法。如果谈到教育机器人中相对高级的编程教育机器人,这些机器 人需要由用户在电脑完成编程学习,进而通过烧录设备连接,最终将其中的程序烧写进去。 也就是说,基于这种操作的编程教育机器人难以脱离电脑等烧录编写设备的束缚,也就使 得用户在整个使用编程教育机器人的时候都需要其他辅助工具的依托,增加了用户学习的 时间成本。而本项目,基于游戏机制的可编程教育机器人则脱离了这一点。它除了编程的过 程采取的是图形化编程这种通俗易懂的编程方式以外,还脱离了其他辅助工具的束缚。用 户可以通过专用的配套app软件实现线上实时学习,并且实时编程,不需要专门经由辅助开 发工具烧录程序。这也就意味着机器人在整个运转过程中是独立自由的,用户可以脱离一 切束缚,随时随地编写出自己想要的程序,通过手机app一键导入机器人并完成机器人升 级,机器人也会立马解锁等级背后的功能,供用户使用。同时,手机app软件会指导用户修改 在编写程序过程出现的错误,并提供卡通式动画讲解,这种简便的方式使得用户在使用机 器人进行编程教育时可以随时反馈接收到学习编程的乐趣。升级后的机器人也可以与其他 用户进行机器人竞技等活动,无形间提升了用户的社交能力。
技术实现要素:
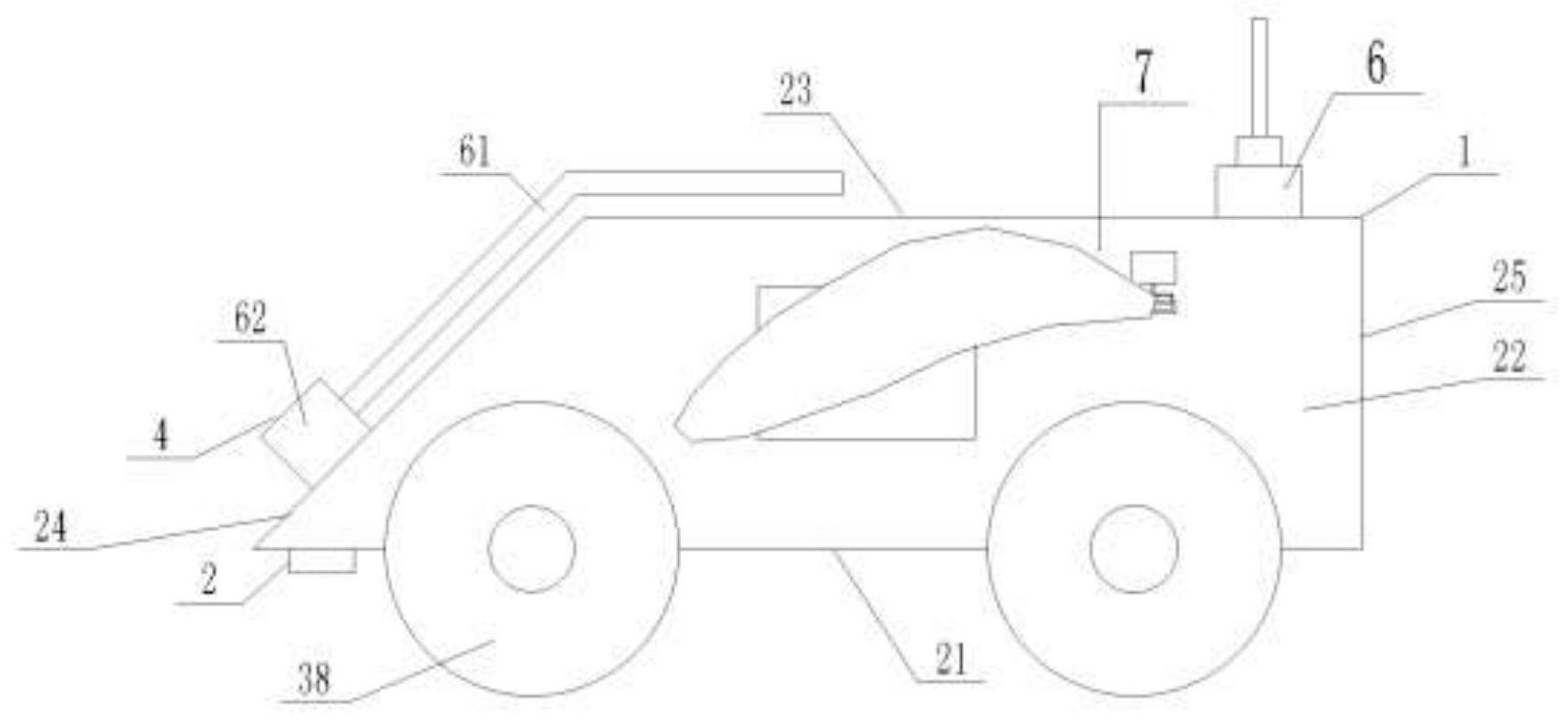
为解决上述现有技术存在的问题,本发明的目的在于提供一种基于游戏机制的可 编程示教机器人。 为达到上述目的,本发明采用如下技术方案为:设计一种基于游戏机制的可编程 示教机器人,包括主体,所述主体前端设有障碍物感知模块,障碍物感知模块上方设有视觉 模块,视觉模块的两侧设有障碍物避让模块,主体四周设有发光模块,主体的后端设有攻击 4 CN 111599252 A 说 明 书 2/6 页 模块,主体两侧设有变身模块。 优选的,所述主体包括底板,底板两侧焊接固定有侧板,侧板顶部焊接固定有顶 板,顶板与底板一端焊接固定连接有前板,另一端活动连接有尾板,所述主体内部设有核心 仓,侧板上设有DIY贴纸区。 优选的,优选的,所述核心仓内设有横板、纵板,通过横板与纵板将核心仓分为不 同的功能区,功能区内设有电源模块、单片机、蓝牙模块、电机驱动模块,电源模块、蓝牙模 块、电机驱动模块与单片机连接;所述底板的四角固定有电机,电机的输出端活动连接有麦 克纳母轮,电机与与电机驱动模块连接。 优选的,所述障碍物感知模块包括红外传感器,所述红外传感器固定在底板靠近 前板一端下方,红外传感器与底板连接处设有卡槽,红外传感器嵌入卡槽内固定。 优选的,所述视觉模块包括摄像头,摄像头固定在前板上位于红外传感器的上方, 摄像头与前板连接处设有卡槽,摄像头嵌入卡槽内固定。 优选的,所述障碍物避让模块包括抬升架,所述抬升架一端连接有舵机,前板上设 有舵机槽所述舵机与舵机槽配合固定连接,舵机输出端与前板对应位置设有避让槽,抬升 架侧面与前板、顶板构成外型贴合。 优选的,所述发光模块包括LED发光板,所述顶板四个角设有板槽,LED发光板嵌入 板槽内固定。 优选的,所述攻击模块包括水弹枪,水弹枪的侧面固定有舵机,顶板上设有舵机 槽,舵机与舵机槽配合固定连接,舵机输出端对应顶板位置设有避让槽。 优选的,所述变身模块包括变身板,所述变身板尾端固定有翻转机构,翻转机构包 括竖向舵机、横向舵机,侧板上设有舵机槽,竖向舵机的尾端与舵机槽配合固定连接,竖向 舵机的输出端与横向舵机尾端垂直固定,横向舵机的输出端与变身板尾端固定,竖向舵机 输出端对应侧板位置设有避让槽。 优选的,所述障碍物感知模块、视觉模块、障碍物避让模块、发光模块、攻击模块及 变身模块与控制模块连接 相对于现有技术,本发明的有益效果为: 1、本发明采用模块化设计,能够进行灵活组合,增加了机器人的趣味性; 2、本发明采用功能模块与基体卡槽连接,拆卸方便; 3、本发明使用麦克纳母轮作为基础移动器件,可以使机器人实现全向移动,包含 原地旋转等; 4、本发明采用红外传感器进行障碍物识别,与机器人检测前方障碍物提供数据, 增加机器人的可玩性; 5、本发明发光模块采用LED彩色板,可以进行LED灯的颜色、启动闪烁或改变亮度 等调控; 6、本发明设计模块采用水弹枪进行设计,能够进行角度自由调控,水弹采用通用 干水子弹,吸水后可膨胀成型,安全无毒,威力小,射程远,增加真实性; 7、本发明采用变身板与翻转机构进行变身,提高示教的趣味性; 8、本发明能够进行DIY贴纸多种示教,增加了教学的多样性; 9、本发明采用一体控制,通过蓝牙模块与外部连接,能够进行实时控制,实用性、 5 CN 111599252 A 说 明 书 3/6 页 推广性强。 附图说明 图1为本发明机器人正面结构示意图; 图2为本发明机器人变身结构示意图; 图3为本发明机器人俯视结构示意图; 图4为本发明机器人内部结构示意图; 图5为本发明机器人侧面结构示意图; 图6为侧板结构示意图; 图7为顶板结构示意图; 图8为前板结构示意图; 其中:主体-1,障碍物感知模块-2,视觉模块-3,障碍物避让模块-4,发光模块-5, 攻击模块-6,变身模块-7,底板-21,侧板-22,顶板-23,前板-24,尾板-25,核心仓-26,DIY贴 纸区-27,横板-31,纵板-32,功能区-33,电源模块-34,单片机-35,蓝牙模块-36,电机-37, 麦克纳母轮-38,电机驱动模块-39,红外传感器-41,卡槽-42,摄像头-51,抬升架-61,舵机- 62,舵机槽-63,避让槽-64,LED发光板-71,板槽-72,水弹枪-81,变身板-91,翻转机构-92, 竖向舵机-94,横向舵机-95。











